混凝土湿喷机臂架结构设计探析
2019-10-15许辅瑶林涛牛心悦
许辅瑶,林涛,牛心悦
(三一汽车制造有限公司,长沙410100)
1 引言
近10年来,高速铁路建设日益增多,隧道建设速度和质量成为高速通车的主要瓶颈。喷湿机是隧道施工中必不可少的设备,不仅可加快隧道施工速度,而且可以提高施工质量,因此,湿喷机设备在高铁隧道施工得到了广范应用[1]。
2 混凝土湿喷机的工作原理
混凝土湿喷机主要利用液压泵推动输送缸做往复运动,由压缩空气稀释后传递到喷头位置,在喷头位置加入速凝剂,喷射到工作面上。该喷射方式中,混凝土迅速凝固,可提高施工效率[2]。在工艺角度,要考虑臂架长度、工作区域和范围。为保证湿喷机的工作稳定,需优化臂架尺寸,深入分析其臂架结构设计,结合可靠工作机理合理优化设计,采用伸缩、俯仰、四连杆等方式,提高工作效率。
3 混凝土湿喷机的结构设计和改进
3.1 混凝土湿喷机结构分析
湿喷机臂架主要结构包括举升臂结构、小臂伸缩结构和喷头总成结构。对现湿喷机进行分析,发现存在举升臂油缸铰接点位置不合适、小臂不能回摆导致隧道内移车频繁,施工中湿喷机出现回弹量大、效率低等现象。
3.2 举升臂架结构设计和优化
举升臂架以TKJ混凝土湿喷机为例进行分析。湿喷机组设计二级臂架,中间为回转机械臂架系统。臂架由举升臂、平行连杆、回转平台、举升油缸、伸缩臂等组成。臂架可完成多个不同动作。不同的动作可确保喷嘴运动轨迹及受喷面距离、角度均符合喷射工作需求,喷射质量有保障,回弹率较低。为优化结构受力,应在举升臂工作范围控制举升油缸举升力最小,确定举升臂优化函数。
举升油缸受力变化越小,则结构力系在举升臂俯仰中变化幅值越小,结构越稳定,工作中的应力变化幅值越小。举升臂受力分析如图1所示。

图1 举升臂受力分析
设计变量点A高度为(yA)、B点坐标(xB,yB)、C点坐标(xC,yC),举升臂长度为lAF,D是AF的中点,lAD是举升臂长度的1/2。
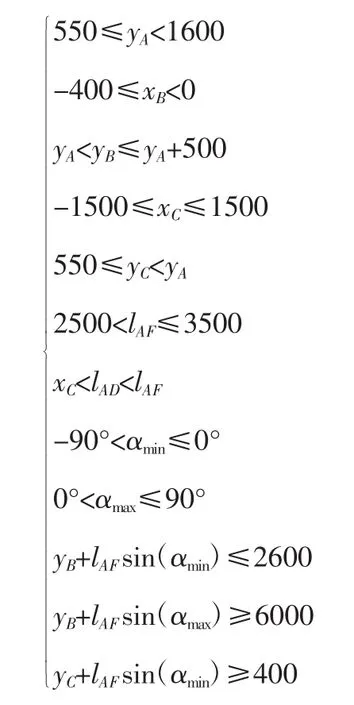
举升臂俯仰角度αmin,αmax,对应矢量表达:

对应设计变量需满足结构设计需求,针对设计安装位置、运输高度及实际工作范围,确定不同变量约束范围:
通过函数及设计变量,以蒙特卡洛模拟方法设计随机过程,反复生成序列,计算参数、统计量,得到其分布特征。系统各单元可靠性特征已知,但是系统可靠性较复杂,多采用随机模拟方式计算系统预计值,模拟次数越多,则精度越高,模拟流程如图2所示。
以此编制优化程序,优化举升臂结构,得到具体结果。方案中,臂架安装高度降低,举升臂架加长,机构工作范围也将发生变化。优化设计后,原各铰点力在最值及均值上比原始方案效率高出很多,其铰点力最大值及平均值减小近31.43%和8.99%。
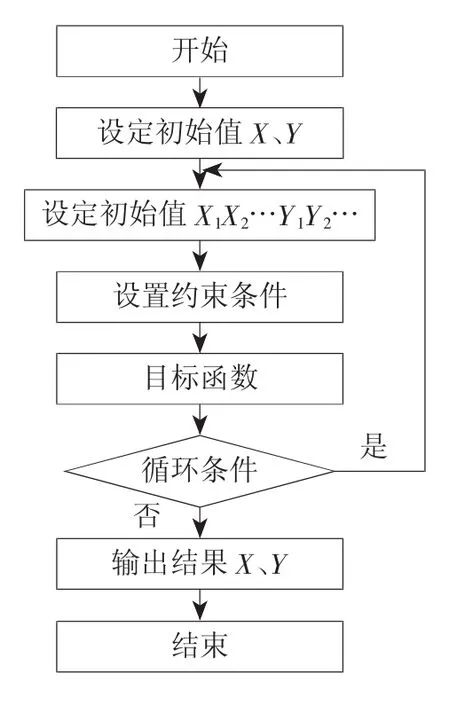
图2 蒙特卡洛模拟流程
3.3 折叠伸缩臂结构设计和优化
喷射臂设计时,要考虑不同组成部分的需求,以发挥各部分最大化价值为最终目标。运动规律以空间机器人机械手运动设计,分析工作臂旋转运动,旋转运动设计在工作臂两端[3]。现车载湿喷机小臂直接采用伸缩式臂架,通过小臂伸缩运动将喷头传动到指定喷射位置。该结构简单,成本低,在车载式湿喷机上得到一定的运用。但局限性比较明显,如不能往回摆动、导致死角大、施工效率低。
为消除伸缩臂不能实现往回摆动导致的施工死角,对现有小臂结构进行结构优化,新设计折叠伸缩臂由折叠臂、小臂和伸缩臂组成。折叠臂可以实现将小臂和伸缩臂240°水平摆动;小臂外套结构设计为四边形薄壁箱型结构,内套后端部及外套前端设计为滑块,以油缸伸缩确保伸缩臂在外套内壁可滑动。伸缩臂内设计为四边形薄壁箱型结构,运动和外臂保持一致。湿喷机工作机构转动副在施工中,使喷射总成在掌子面顶部、侧部自由活动,确定喷头总成的实际施工空间及姿态,使喷头总成随掌子面加工方向有序喷射混凝土。通过新增车载湿喷机折叠臂,使小臂和伸缩臂能水平摆动240°,更适合现场施工,可以减少移车次数,使效率提升20%。
3.4 喷头结构设计和优化
现有喷头总成包括360°马达、240°马达、喷头、混流器,喷头总成因冲击易导致360°马达和240°马达连接座松动,导致回弹量大和平整度降低。对喷头结构优化,新改进后,360°和240°马达连接座连接结构消除松动;通过增加8°刷动马达,改进后喷头总成参数合理,且刚度高,振动幅度小,在某地区施工现场应用中表现良好,回弹量降低9.86%。使用优化后的湿喷机臂架进行作业,喷涂作业面均匀,混凝土不易脱落,技术指标已经达到国内较高的要求,应用效果突出。
4 结语
综上所述,本文主要对湿喷机的结构设计进行分析,着重对混凝土湿喷机臂架结构进行优化设计。从举升臂结构、折叠伸缩臂结构、喷头结构3方面进行设计优化,优化大臂铰接点位置,新设计折叠臂、优化现有马达连接座安装结构及增加8°刷动马达,使举升臂铰点力最大值及平均值分别减小31.43%和8.99%,施工效率提升20%和回弹量降低9.86%。
