反向低秩稀疏约束下的融合Lasso目标跟踪算法
2019-10-15张国山孙申申
田 丹 ,张国山,孙申申
(1. 天津大学电气自动化与信息工程学院,天津 300072;2. 沈阳大学信息工程学院,沈阳 110044)
视频目标跟踪技术是模式识别、机器视觉等研究领域的一个重要研究内容,广泛应用于安防监控、智能交通、医学诊断等领域.但在实际场景中,该技术经常面临目标外观变化(目标旋转、尺度变化)、复杂环境干扰(遮挡、光照骤变)、目标突变运动等问题,严重影响跟踪结果,导致跟踪漂移.改善复杂场景环境下视频目标跟踪的精确性和实时性,具有重要的研究意义.
稀疏表示方法[1-4]具有低存储需求的优势,同时还能克服遮挡和噪声带来的跟踪漂移问题,广泛应用于目标跟踪领域.但该方法仍有不足之处,即目标模板缺乏图像全局特征信息.低秩约束方法[5-8]能将目标表观建模在低维子空间,子空间表达可以提取丰富的图像特征,从而增强目标跟踪对光照和位置变化的鲁棒性[9-10].所以将稀疏表示和低秩约束方法相结合能增强跟踪的精确性.Zhang等[11]通过字典模板的线性稀疏表示和表示系数的低秩约束学习候选粒子,同时融合目标表观的时域一致性限制,抑制了遮挡等复杂环境带来的干扰问题.Zhong 等[12]联合稀疏分类器和稀疏生成模型建立稀疏联合目标表观模型,实现鲁棒目标跟踪.Sui等[13]结合帧间子空间结构和相邻斑块的局域相关性限制,在粒子滤波框架下低秩稀疏表示目标表观.Wang等[14]利用时空连续性限制,在局域加权距离度量下构建了基于稀疏表示的目标跟踪器.上述方法分别在不同程度上限制了复杂遮挡、光照变化、位置变化等因素带来的负面效应,但没有考虑目标突变运动和跟踪效率问题.针对这一问题,提出了一种反向低秩稀疏约束下的融合 Lasso目标跟踪算法.引入融合 Lasso模型获取跳跃信息,适应目标的突变运动现象.采用核范数低秩表示目标表观的时域相关性,去掉不相关候选粒子.利用反向稀疏表示描述目标模板的局域信息,降低在线优化计算的复杂度,提高跟踪效率.
1 目标表示模型
1.1 粒子滤波框架
粒子滤波是一种贝叶斯重要性采样技术,用于估计动态系统中状态变量的后验分布情况.目标跟踪作为一种典型的动态状态持续估计问题,可以在粒子滤波框架下描述.假定xt表示跟踪目标在t时刻的状态,yt表示该时刻对应的观测,则运动状态的后验概率p( xt|y1:t)的递归估计公式[15]为


1.2 融合Lasso模型
Lasso是一种变量选择模型,模型解具有稀疏性.假定y表示观测数据,D表示字典,α表示 D对应的表示系数,则Lasso模型可表示为

式中λ为调整参数.等式右侧第 1项为重构误差项,保证字典表示后的数据与原始数据间误差尽量小;第2项为惩罚项,使绝对值较小的表示系数收缩为 0,实现变量选择和稀疏限制.该模型已被应用于视频目标跟踪,但其不足之处在于,在处理连续变量时没有考虑变量间的顺序,对所有系数进行同等程度的收缩,易导致绝对值较大的系数过度收缩.故这里引入融合Lasso模型,限制目标表观在相邻帧间具有较小差异的同时,允许个别帧间存在较大差异性,从而获取跳跃信息,适应目标的突变运动.
融合Lasso模型作为Lasso模型的扩展[16],不仅对表示系数进行稀疏约束,还对相邻变量表示系数间连续性差异进行稀疏限制.融合Lasso模型可表示为

式中:1λ、2λ表示调整参数;αi为表示系数α的第i个元素;N表示帧数.第 3项为融合罚项,作用是对相邻变量表示系数的连续性差异进行稀疏限制.
1.3 反向低秩稀疏约束下的融合Lasso模型
融合 Lasso模型通过字典元素的稀疏组合表示目标表观,能适应目标的突变运动.同时因遮挡位置具有稀疏性特征,该方法还能克服遮挡因素的影响,但不足之处在于缺乏对图像全局特征的描述.考虑到大多数连续目标表观具有相似性,所以可以选择有代表性的观测获取目标表观的主要特征.低秩限制能将连续目标表观建模在低维子空间,子空间表达可以提取丰富的图像特征,从而抑制位置、光照变化的影响.这里将低秩约束引入到融合Lasso模型以增强跟踪的鲁棒性.
在粒子滤波框架下,提出的低秩约束下的融合Lasso模型利用目标模板的线性稀疏组合表示候选区域,模型求解涉及到大量 l1优化问题的计算,计算复杂度随着候选粒子的数目线性增加.考虑到这一问题,这里引入反向稀疏表示的思想,即利用候选粒子反向线性稀疏表示目标模板.因模板数明显小于采样粒子数,这样可大大降低在线跟踪的计算复杂度.再者,低秩约束通过相邻帧间目标表观的相似性去除不相关粒子,但当目标突变运动时,利用目标模板表示候选区域相当于将候选粒子的选取限定在图像的小范围区域内,这样相邻帧间不满足目标表观一致性,易导致跟踪漂移现象.而反向稀疏表示方法利用候选粒子稀疏表示目标模板,有效避免了这一问题,能同时增强跟踪的实时性和鲁棒性.
再有,考虑到全局稀疏表示法不易解决局部遮挡问题,这里通过非重叠均匀分割的方式提取候选粒子中的局部斑块,按列存储,从而描述目标的局域表观信息.
在融合 Lasso 模型框架下,结合低秩限制和反向稀疏描述,提出一种反向低秩稀疏约束下的融合Lasso 模型,表示为
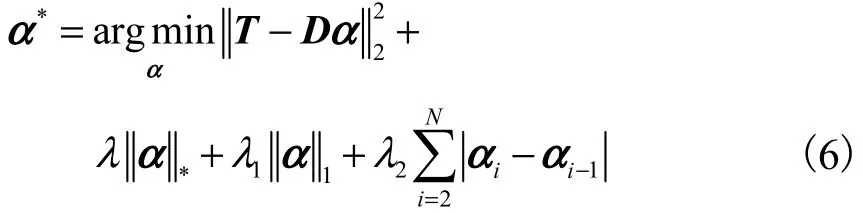
式中:T表示目标模板;λ、λ1、λ2表示调整参数;表示核范数,鉴于秩最小化问题是一个 NP难题,用核范数凸近似低秩约束.首先,在视频第 1帧中通过人工标记的方法获取初始目标模板T1.保留连续帧的跟踪结果,利用对应的向量化的灰度观测构建目标模板矩阵T.然后,通过粒子滤波方法基于运动模型在当前帧采样K个候选状态,用对应的观测图像向量形成字典.这样,可以通过候选粒子反向表示目标模板,即T=,其中E表示重构误差向量.
通过模型(6)各帧中的每个候选粒子被赋予一个表示系数,利用表示系数的幅值可以度量目标与该候选的相似性.表示系数幅值较大的候选更可能属于目标类,计算最优状态时其对重构模板的贡献应该越大,即赋予更大的权值.反之,应赋予较小的权值.归一化表示系数获取候选状态的观测概率,构建观测模型

2 在线跟踪优化策略
2.1 数值算法
目标表观优化模型(6)中调整项含非凸函数,不易直接求解.下面引入等式限制和松弛变量,将模型转化为

这里利用交替式迭代优化策略求解,具体步骤为如下.
步骤1固定Q2、Q3,更新Q1、Q4,对应的模型为


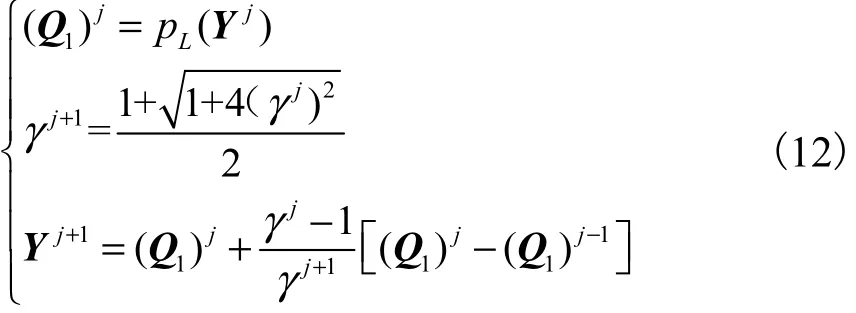
利用快速迭代阈值收缩算法(FISTA)计算调整项的近似算子,通过迭代j=1,2,…,J,得到式(9)的解.具体迭代步骤如下.
(2)迭代更新.
步骤2固定Q3、Q4,更新Q1、Q2,对应的模型为

步骤3固定 Q2、Q4,更新 Q1、Q3,对应的模型为

依据前面的定义Q1=Dα,Q3=α,该模型为典型的 Lasso问题.这里基于最小角回归算法(LARS)求解模型,并利用SPAMS开源稀疏优化工具箱实现.
2.2 模板更新机制
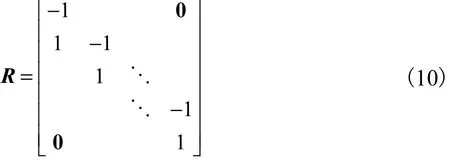
为了适应目标表观变化,避免跟踪漂移现象,局部更新目标模板的公式为

式中:iT为新目标模板;ir为当前跟踪结果;Ti-1为前帧存储的目标模板;μ为权重;τ为经验预设的阈值,用于界定目标表观变化的程度.该机制能有效获取目标表观变化情况,当存在局部遮挡时,去除被遮挡的斑块,将没被遮挡的局部斑块更新到新目标模板.
3 实验结果与分析
为了验证算法在复杂场景下跟踪的有效性,基于MATLAB2015b实验平台,利用 OTB数据集中faceocc2、singer1、boy、deer 4组标准视频序列进行测试,这些序列中涵盖了严重遮挡、光照骤变、尺度变化、突变运动等挑战因素.实验中对比了本文算法与LRT[11]、SCM[12]、LLR[13]、,IST[14]4 种目前较为热点算法的跟踪效果.算法参数设置如下:图像模板大小为32×32,局部斑块大小为 8×8,候选粒子采样数为300.调整参数λ=0.1,λ1=0.1,λ2=0.01.权重μ=0.95,阈值τ=0.1.

图1 视频faceocc2的跟踪效果比较Fig.1 Comparison of tracking results on video faceocc2
3.1 定性实验
目标遮挡情况:视频 faceocc2中存在目标外观变化和频繁局部遮挡问题.图 1给出了人脸运动的代表性跟踪效果比较.几种算法均利用稀疏表示方法在不同程度上克服了遮挡因素的影响,特别是第712帧当目标被严重遮挡时均能实现有效跟踪.但当同时存在人脸旋转(平面旋转或侧转)和遮挡等复杂情况时,例如第422帧和第581帧,LLR算法因缺少对时间一致性的考虑,个别帧存在跟踪漂移现象.IST算法对目标表观严重变化情况较为敏感,例如第581帧.本文算法通过局部稀疏表示和模板在线更新,能实现有效跟踪.
光照、尺度变化情况:视频 singer1中存在剧烈光照变化和快速尺度变化问题.图 2给出了歌手运动的代表性跟踪效果比较.从图中可以看出,LRT算法在该场景下不能有效获取目标位置信息,跟踪失败.而本文算法在应对光照和尺度变化时,通过对目标表观的低秩约束描述帧间相似性,实现了鲁棒跟踪.突变运动情况:视频 boy和 deer中存在目标突变运动问题,导致目标表观和位置快速变化.图 3和图 4给出了目标运动的代表性跟踪效果比较.视频 boy的目标跟踪中,LRT、LLR和 IST 3种算法对目标突变运动问题敏感,跟踪结果漂移到视频帧中不同区域(例如第 487帧和第 585帧).视频 deer的目标跟踪中,LRT、LLR和 IST算法仍存在不同程度的跟踪漂移现象.特别是 SCM 算法,在第 68帧后丢失目标,跟踪失败.本文算法因引入了反向稀疏表示的思想,同时利用了融合罚约束,允许个别帧间存在较大目标表观变化,能实现稳定跟踪.

图2 视频singer1的跟踪效果比较Fig.2 Comparison of tracking results on video singer1

图3 视频boy的跟踪效果比较Fig.3 Comparison of tracking results on video boy

图4 视频deer的跟踪效果比较Fig.4 Comparison of tracking results on video deer
3.2 定量实验
为了定量分析比较跟踪算法的精确度,定义目标跟踪的中心点位置误差为

式中:(xi, yi)表示跟踪目标的中心点位置;( xc, yc)表示真实的目标中心点位置.中心点位置误差度量了跟踪目标的目标框中心与真实的目标框中心间的欧氏距离,该数值结果越小跟踪的精确度越高.
图 5给出了各算法跟踪 faceocc2、singer1、boy、deer 4组标准视频的中心点位置误差变化曲线图,其中中心点位置的真实值采用 OTB数据集中提供的groundtruth数据.实验结果表明,目标面临严重遮挡时几种算法跟踪误差均明显增大,但遮挡消失后跟踪精度能有效恢复,如图 5(a)所示(faceocc2序列中目标脸侧转同时被杂志严重遮挡的情况).

图5 跟踪结果的中心点位置误差Fig.5 Center position error of tracking results
视频存在剧烈光照、尺度变化时,本文算法的跟踪精度明显优于 LRT和 LLR算法,如图 5(b)所示.特别要指出的是,本文算法主要优势在于目标出现突然运动或大幅位置变化时,明显具有更高的跟踪精确度,如图5(c)和图5(d)所示(boy和deer序列中人脸和鹿头的运动跟踪情况).
为了进一步定量描述算法的实时性,表1给出了几种算法的平均跟踪帧率(FPS),即算法平均每秒的运行帧数.
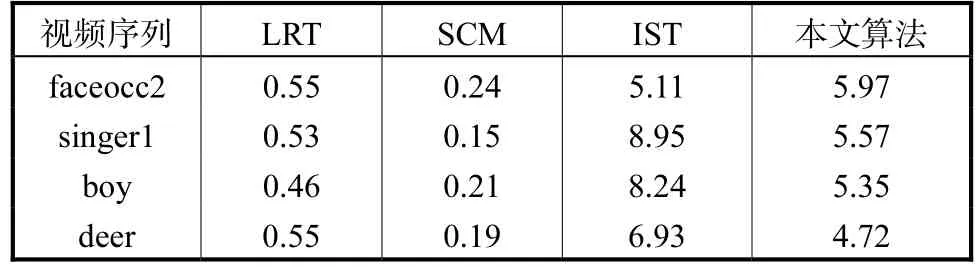
表1 算法运行速度的比较(FPS)Tab.1 Comparison of the running time(FPS) 帧/s
实验结果表明,本文算法和IST算法通过建立目标表观的反向稀疏表示描述,将在线跟踪中l1优化问题的数目由候选粒子数简化为 1,有效提高了跟踪速度.但在 IST算法的基础上,本文算法引入了融合Lasso惩罚项,有效提高了目标突变运动情况下的跟踪精度.
4 结 语
在目标跟踪任务中,目标的突变运动和外观变化等问题严重影响其精确性和稳定性.针对这一问题,本文基于粒子滤波框架提出了一种反向低秩稀疏约束下的融合Lasso目标跟踪算法.针对目标的突变运动问题,引入融合 Lasso模型,限制目标表观在相邻帧间的相似性,同时允许个别帧间存在差异性,从而获取运动跳跃信息.针对目标外观变化问题,利用核范数凸近似低秩限制,将连续目标表观建模在低维子空间,从而提取丰富的图像特征信息.为了满足跟踪的实时性要求,引入反向稀疏表示的思想,即利用候选粒子线性稀疏表示目标模板,降低在线跟踪的计算复杂度.仿真实验验证了所提跟踪算法的有效性.
