面向深空探测的电磁帆推进技术研究进展
2019-10-15
兰州空间技术物理研究所 真空技术与物理重点实验室,兰州 730000
开展深空探测是人类揭示宇宙奥秘、探索宇宙起源最重要、最直接的技术手段,而深空探测要求推力器能够为航天器提供极大的速度增量,此外载人深空探测还对任务周期具有严苛的要求。目前航天器受携带工质质量的制约越来越严重,若使用传统化学推进系统开展深空探测任务,极大的速度增量要求其携带的工质质量将占到航天器总质量的80%以上,发射难度以及成本成倍增加;若使用常规电推进技术,尽管比冲高,但是推力较小,任务周期较长,且仍未摆脱需要工质的束缚,航天器寿命仍然有限。
电磁帆是利用太阳风驱动产生推力的一种新型推进技术,可以实现少工质甚至无工质推进,具有效率高、寿命极长和比冲超高等突出优点,是开展深空探测任务极具发展潜力的推进方案之一。
1 电磁帆的基本概念及其特性
1.1 太阳风
太阳除了发出太阳光,每天还可以抛射出重达1.5千亿吨的物质[1],形成太阳风并向空间持续扩散,这是一种充满太阳系内的无碰撞、低密度、高速度的等离子体,主要由质子和电子组成。典型的等离子体数密度和温度分别为5 cm-3和10 eV,在1 AU 处(地球轨道)的速度约为300 ~ 900 km/s[2],因而太阳风也被称为太阳风等离子体。
与太阳帆[3]利用太阳光在帆板上产生的光压获得推力类似,电磁帆是利用其与太阳风等离子体之间的相互作用实现推进。由于太阳风中质子的质量远高于光子,因而同尺寸的电磁帆产生的推力远高于光帆。当前发展的主流电磁帆主要有3类,分别为电帆、纯磁帆及磁等离子体帆,如图1所示,下面分别加以介绍。
1.2 电帆
电帆的概念最早是由芬兰气象研究所的Pekka Janhunen于2004年提出,最初设计的结构如图2(a)所示[4]。假设结构由横截面半径为5 μm的铜构成,铜丝长为10 km,间隔5 m,则电帆质量约为250 kg。在1 AU处的太阳风动压为2 nPa,则产生的推力为1.2 N,相应的加速度为5 mm/s2。 2006年,Janhunen等人借鉴电动力绳系技术进一步对电帆的结构进行了改良[5],使得电帆简单化且易于工程实现,其结构如图2(b)所示。帆面由多根(50~100)呈放射状分布且不断旋转的带电金属绳系和一个电子枪组成,这种结构产生推力大小F的线密度可由下式进行估算:
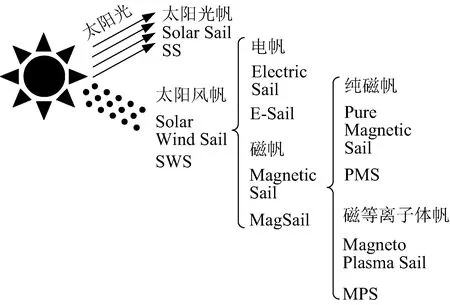
图1 利用太阳光和太阳风的帆类推进技术分类Fig.1 Classification of solar sail and solar wind sails propulsion technology

(1)
式中:V0为绳系电位,eV1=miv2/2为太阳风等离子体中质子的动能,与V0相比往往可以忽略;Pdyn为太阳风的动压;z为绳系长度。设V0=20 kV,则推力线密度约为532 nN/m,对于由100根20 km长的绳系组成的电帆,产生的推力可达1 N。若绳系材料为铝,截面半径为25 μm,则总质量仅为11 kg左右,电子枪所需功率为400 W左右,因而推功比约为250 N/kW。2009年,为了避免绳系之间的相互碰撞,Janhunen等人又进一步改进了电帆结构[6],如图2(c)所示。
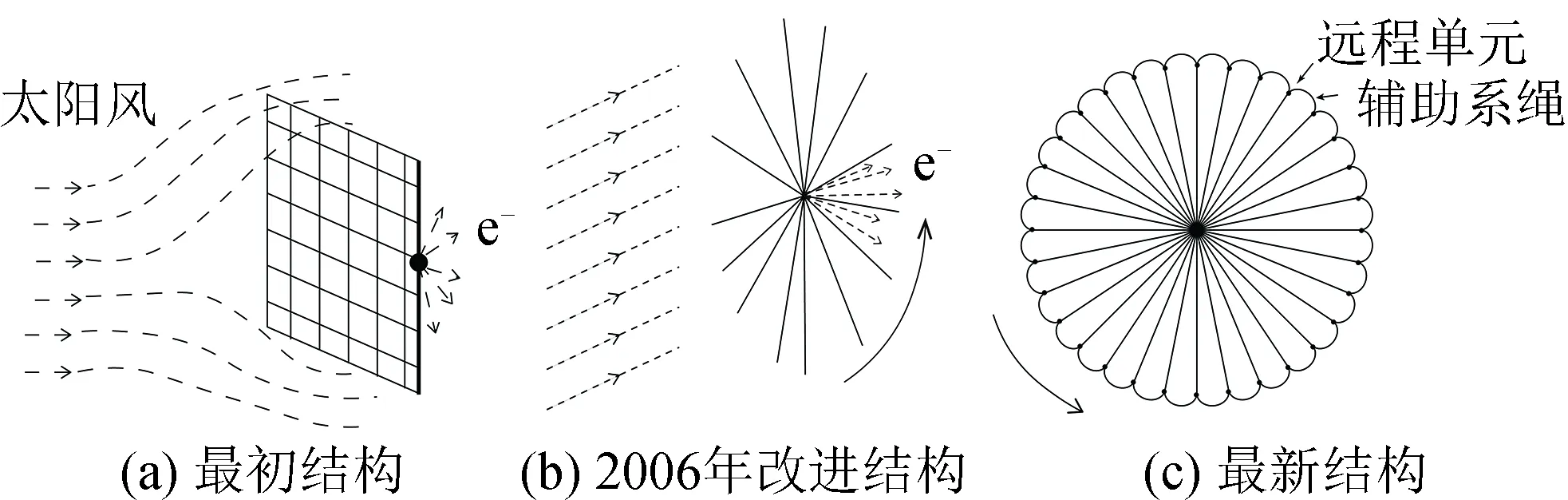
图2 电帆结构示意Fig.2 Structures of E-sails
电帆在工作时,通过电子枪向外发射电子使得帆面保持在一个较高的正电位,从而在空间产生一定范围的电场,入射的太阳风等离子体中的质子被电场散射、偏转甚至反弹回去,质子的部分动量传递给电帆从而产生推力。
1.3 纯磁帆
纯磁帆的概念最早由美国Boeing公司的D. G. Andrews和Martin Marietta航天研究所的R. M. Zubrin于1989年提出[7],其基本工作原理如图3所示[8]。太阳风等离子体中的质子在很宽的空间范围内被大型超导线圈产生的磁场反射,作用在线圈上的反作用力推动航天器沿着太阳风方向加速运动。
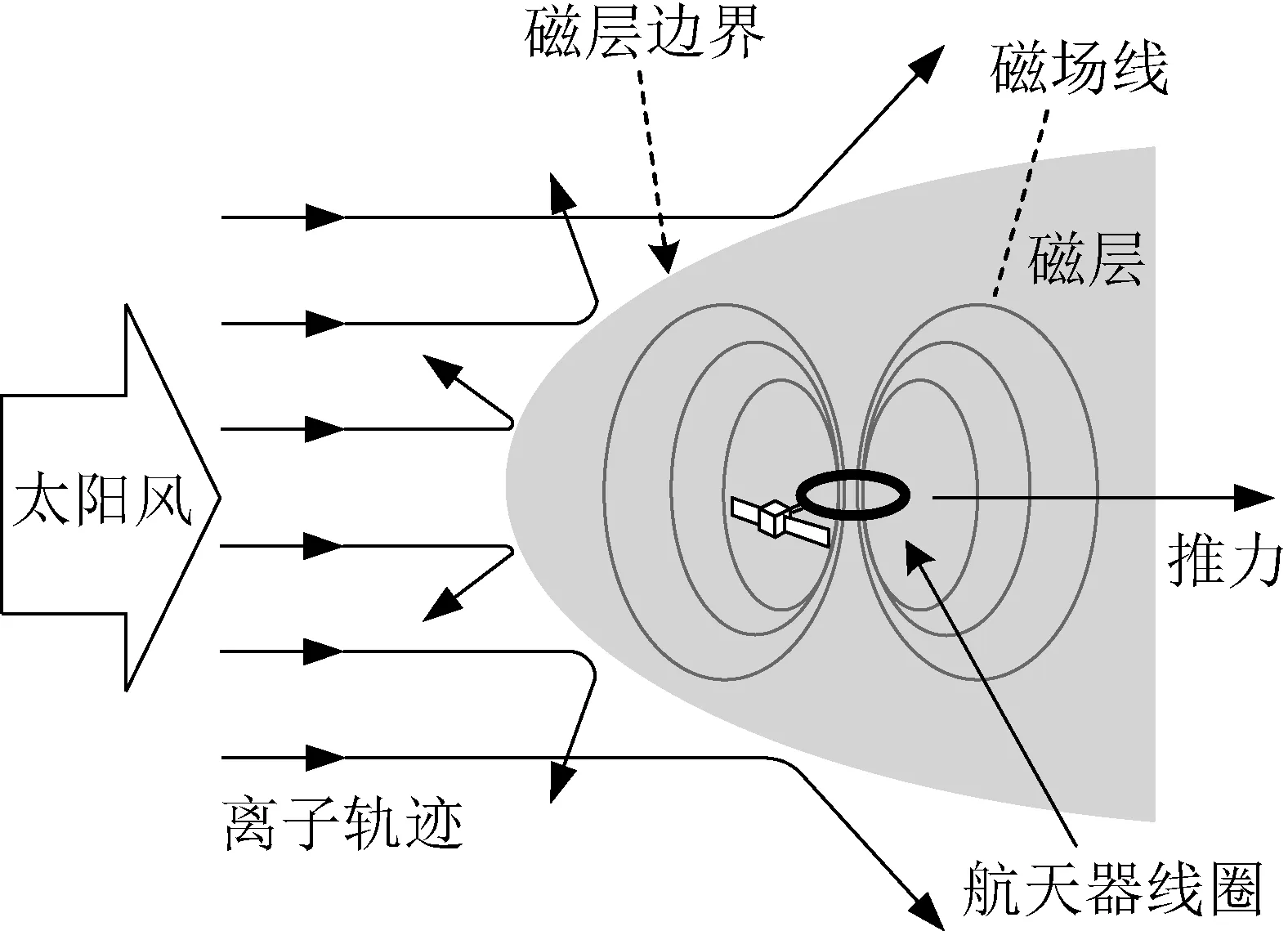
图3 纯磁帆推力产生过程示意Fig.3 Thrust generation progress of pure magnetic sails
太阳风等离子体与空间磁场的作用边界称为磁顶层(magnetopause),磁顶层内部包围的空间区域称为磁腔 (magnetosphere),施加在超导线圈上的力的大小F可由下式计算[8]:
(2)
Zubrin等人从理论上估算得到,产生10 N推力所需磁场作用区域的尺寸约为64 km,而20 N推力所需的磁场作用区域更是达到100 km[9]以上,相应的超导线圈的直径已超过几十千米。如此巨大的超导线圈,无论是发射还是展开,在目前的工程技术条件下是无法实现的,因此在提出之初,这种推进方案并未引起学术界的研究兴趣。
1.4 磁等离子体帆
2000年,美国华盛顿大学的R. M. Winglee等人在纯磁帆的基础上发展了磁等离子体帆(Magneto Plasma Sail, MPS)概念[10]。该推进概念的最大优点在于从技术和材料上避免了使用大尺寸线圈的难题。MPS基本工作原理如图4所示,小尺寸超导线圈(米量级)产生较小空间尺寸的磁腔,航天器自身携带的等离子体源通过向磁腔喷射等离子体使得磁场膨胀,形成相当于几十千米纯磁帆产生的磁腔,从而产生可观的推力。另外,MPS产生15~20 km大小的磁场作用区域每天所消耗的工质仅约0.5 kg,同时功耗小于1 kW,是一种理想的少工质推进技术。在等离子体能量转换为磁能的效率达到20%时,推功比可达250 mN/kW[11]。
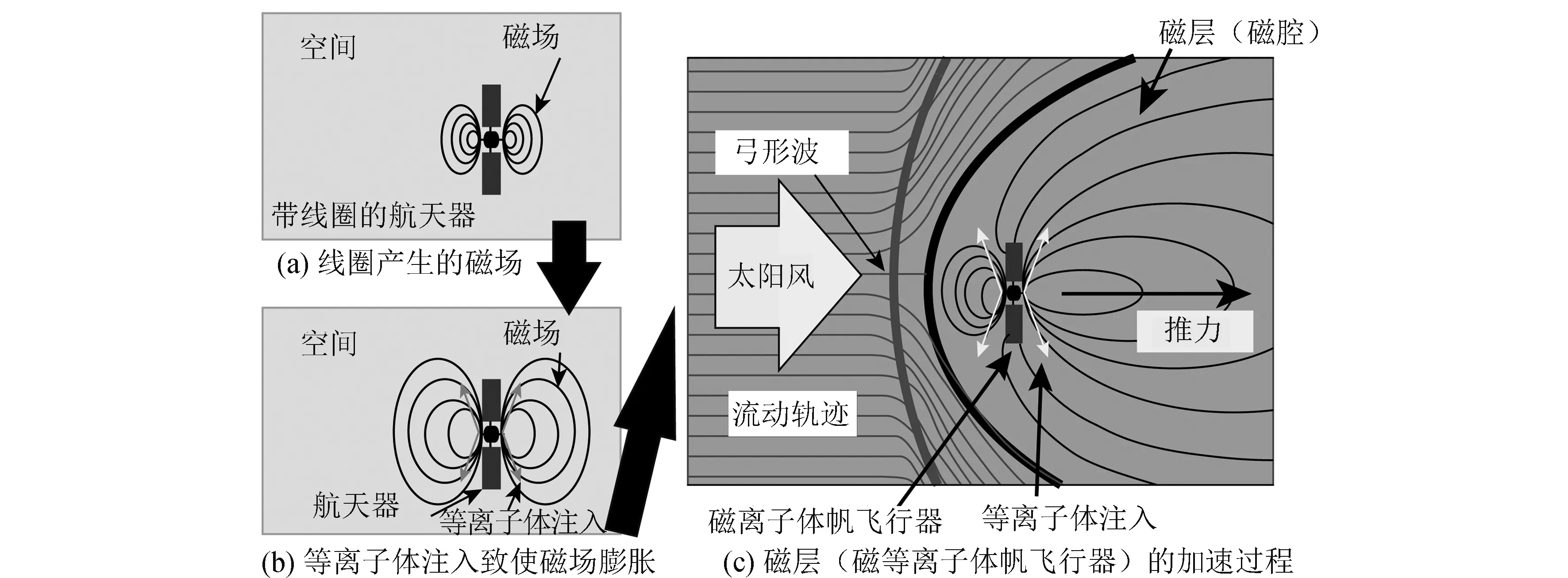
图4 磁等离子体帆工作原理示意Fig.4 Working principle of magnetic plasma sails
1.5 电磁帆与其他电推进的比较
表1给出了新型电磁帆与常规离子、霍尔电推进技术主要性能的指标对比[12]。从中可以看出,电磁帆所需的输入功率极小,使得电磁帆推进的推功比普遍高于离子、霍尔电推进,而电帆更是高出了4个数量级。然而,从工程应用角度而言,电帆与纯磁帆的空间尺寸过大,且帆面展开面临着严峻的技术挑战,使其空间应用受到极大限制。相比而言,磁等离子体帆在具有高推功比的同时,能够保证帆体尺寸与常规电推力器的尺寸相当,因而具有较大的应用价值。
随着远离太阳,与电磁帆作用的太阳风等离子体密度随距离呈平方反比规律下降,因而电磁帆存在空间应用的优势空间。从表1可以看出,在约2.2 AU处,电磁帆推功比降至与霍尔电推进相当,在约3.2 AU处,进一步降低至离子电推进水平。因此,从推功比角度来讲,磁等离子体帆较适宜开展小行星带(2.17~3.64 AU)内侧星际空间的探测。
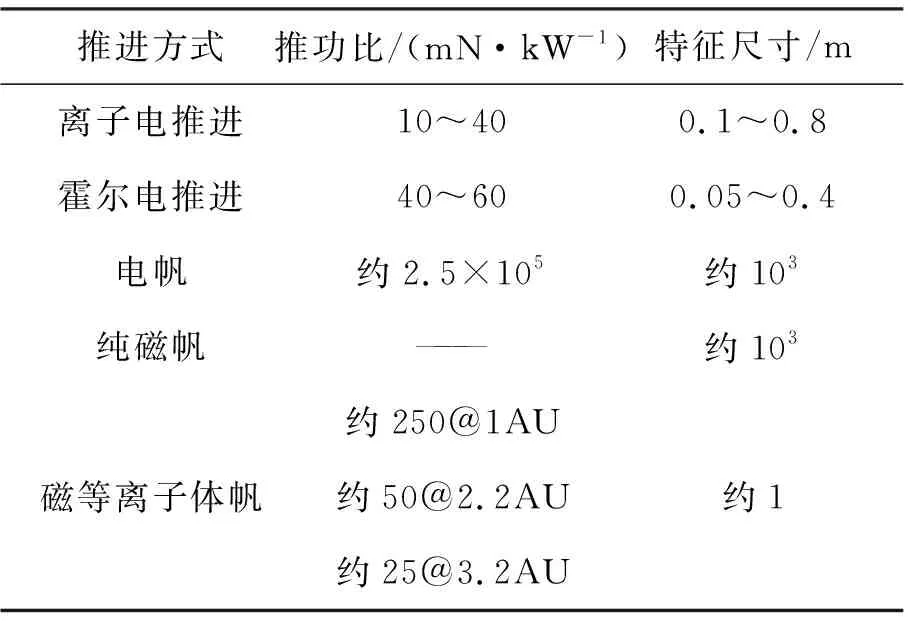
表1 电磁帆与其他电推进的对比
2 电磁帆研究进展
2.1 电帆
国内外对电帆绳系加工制造及其展开技术、电帆推力控制技术以及基于电帆推进的轨道优化技术等方面进行了研究。
(1)电帆绳系加工及其展开技术
2008年,芬兰气象研究所与赫尔辛基大学合作研制了一套电帆推力器模型,如图5所示[13]。该模型主要是为电帆绳系的加工以及展开积累一定的前期经验,并不具备飞行验证能力。2010年12月,欧盟启动了编号为ESAIL EU FP7 的“电帆推进技术研究项目”,2013年完成了电帆推力器原理样机的研制,绳系长15 m。该原理样机搭载在爱沙尼亚塔尔图大学和塔林大学研制的一颗重10 kg、边长10 cm的立方卫星ESTCube-1上,于2013年5月7日由阿利安太空公司的织女号火箭上发射升空。该卫星的主要科学任务之一便是在LEO轨道对电帆进行第一次飞行验证。然而,由于绳系卷筒故障,导致绳系自旋展开失败,未能完成飞行验证任务。该卫星在运行了26个月之后,由于电能供应不足,进入负能量状态,因而无法再进行电帆的进一步分析和验证工作。2014年中国空间技术研究院钱学森空间技术实验室黄小琦等人开展了大型太阳帆薄膜折叠及展开过程的数值模拟,提出了一种适合空间应用的太阳帆帆面折叠方式,为大型太阳帆选材和结构设计提供了依据[14]。电帆的帆面折叠与展开过程与太阳帆类似,可以借鉴参考。
图5 电帆推力器模型Fig.5 Electric sail thruster model
(2) 电帆推力控制
电帆相对于传统化学推进、电推进,具有结构尺寸大等特点。通过对电帆不同位置的控制参数、入射角进行调节,可以实现对电帆推力的控制。北京控制工程研究所的于洋等人针对电帆推进技术,提出了一种基于导线电势调节的电帆推力矢量控制方法。西北工业大学陈茂林等人分析了不同导线间距情况和斜入射情况下的导线鞘层分布及电动帆推力特性,研究结果明确了电动帆的推力矢量及其随姿态的变化, 对电动帆航天器轨道动力学的优化设计提供了参考[15]。
(3)基于电帆推进的航天器姿态与轨道控制
作为一种新型推进方式,研究电帆作用下的航天器的姿态与轨道控制是十分必要的。哈尔滨工业大学的霍明英等人基于电帆推进方式,对航天器姿态轨道耦合动力学、 轨迹优化、姿态跟踪控制和日心悬浮轨道应用开展了研究[16];2015年,北京控制工程研究所以及通信卫星事业部王昱等人用粒子群算法开展了利用电帆推进的飞行器轨迹优化设计,提出了两种优化设计方法,算法收敛性好,鲁棒性好[17]。
2.2 纯磁帆及磁等离子体帆
由于纯磁帆与磁等离子体帆之间的高度关联性,国内外往往将这两种磁帆结合在一起研究。国外对磁帆的研究起步早,机理研究相对深入,地面验证相对全面,但尚未开展空间飞行验证。目前正在开展或已开展过相关研究的国家主要是美国和日本,特别是日本宇宙航空研究开发机构(JAXA)对电磁帆推进技术非常重视,联合多所本土高校开展了大量的仿真模拟和试验研究,水平和成果已位居世界前列。
目前对磁帆相关技术的研究主要采用数值仿真和地面试验的方法,而其中又以数值仿真为主,下面分别介绍国外在这两方面的研究进展。
(1)数值仿真研究进展
在数值仿真方面,由于磁腔尺寸(或磁顶层厚度)的变化范围很大,因此在数值模拟中使用的模型及考虑的因素也随之不同,图6给出了不同磁腔尺寸下太阳风等离子体应采取的处理方式[18]。
在数值模拟过程中,主要分3种情况分别对等离子体进行近似处理,其判断依据分别是磁顶层与线圈中心之间的距离L、离子的拉莫尔回旋半径rLi和电子的拉莫尔回旋半径rLe的相对大小。
1)L≫rLi,离子和电子的粒子效应可以忽略,可以将太阳风等离子体处理为单流体模型,在模拟过程中可以采用磁流体动力学(MHD)方法;
2)L≈rLi,L≫rLe,离子的粒子效应不可忽略,电子仍然可以处理为无质量的流体,在模拟过程中需要在MHD的基础上引入处理离子动理效应的网格质点(Particle in Cell, PIC)方法,即混合PIC法(Hybrid-PIC);
3)L
截止目前,世界范围内对磁帆开展的仿真模拟工作如表2所示[10, 18-32]。无论是针对大尺寸磁场采用的MHD方法,还是针对中小尺寸磁腔采用的PIC方法,模拟结果均表明,利用空间磁场与太阳风等离子体的相互作用,可以为航天器提供可观的推力。
对于1 km大小的磁腔,产生的推力大约在1 mN量级;磁腔尺寸增大到30 km时,相应的推力可以提升到牛级;磁腔进一步增大到500 km左右时,产生的推力可达1 000 N以上。
通过注入速度、密度等参数合适的等离子体,验证了磁场碰撞的可行性,并从定量结果分析来看,相较于纯磁帆,磁等离子体帆可将推力提升40~300倍。
(2)地面试验研究进展
日本在磁帆地面试验验证方面开展了最全面、最详细的研究。
2006年,JAXA的Ikkoh Funaki等人对纯磁帆开展了地面试验研究[34],采用小型磁等离子体推力器的羽流模拟太阳风等离子体,对真实磁帆成功进行了缩比验证,在磁帆周围观察到了磁腔的存在。
2014年,JAXA的Yuya Oshio等人对高β等离子体注入的磁等离子体帆推力进行了试验研究[35],试验中得到的典型的磁场膨胀结果如图7所示。试验结果确认了随着注入等离子体的增多,推力出现一定程度的上升,最大推力增益约为4.1。

表2 磁帆仿真模拟研究汇总
2015年,为了进一步提高磁等离子体帆的推力,日本明石工业研究所的Tatsumasa Hagiwara等人提出了一种磁喷嘴型磁等离子体帆推进方案,如图8所示,并对其进行了试验验证[36],试验装置如图9所示。
试验结果显示,纯磁帆模式的推力约为0.5 N,注入等离子体源单独工作时产生的推力约为2.7 N,两者推力之和为3.2 N;而磁喷嘴型磁等离子体帆的推力约为5.6 N,约为纯磁帆的12倍,是纯磁帆与等离子体源各自单独工作时推力之和的2倍,试验结果成功验证了磁喷嘴型磁等离子体帆的可行性。

图7 磁场膨胀试验Fig.7 Magnetic field expansion experiment

图8 磁喷嘴型磁等离子体帆概念Fig.8 The schematic illustration of magneto plasma sail with a magnetic nozzle
国内对电磁帆的研究相对较少,进展缓慢,主要集中在概念研究和数值仿真分析方面。
2007年,北京航空航天大学对磁场膨胀机理和磁通守恒进行了仿真研究[22, 36-37],分析了注入等离子体参数对磁场膨胀效果的影响,但之后未见到更进一步的研究报道。2015年,上海卫星工程研究所对电磁帆推进技术的研究现状和发展趋势开展了调研与分析,作者认为此种推进技术可以缩小航天器规模,降低运行成本,具有广阔的空间应用前景[39],但目前该项技术成熟度较低,很多技术难点有待进一步研究。2017年上海卫星工程研究所提出了电磁桨推力器的概念,但没考虑的因素较多,还需进一步研究[40]。
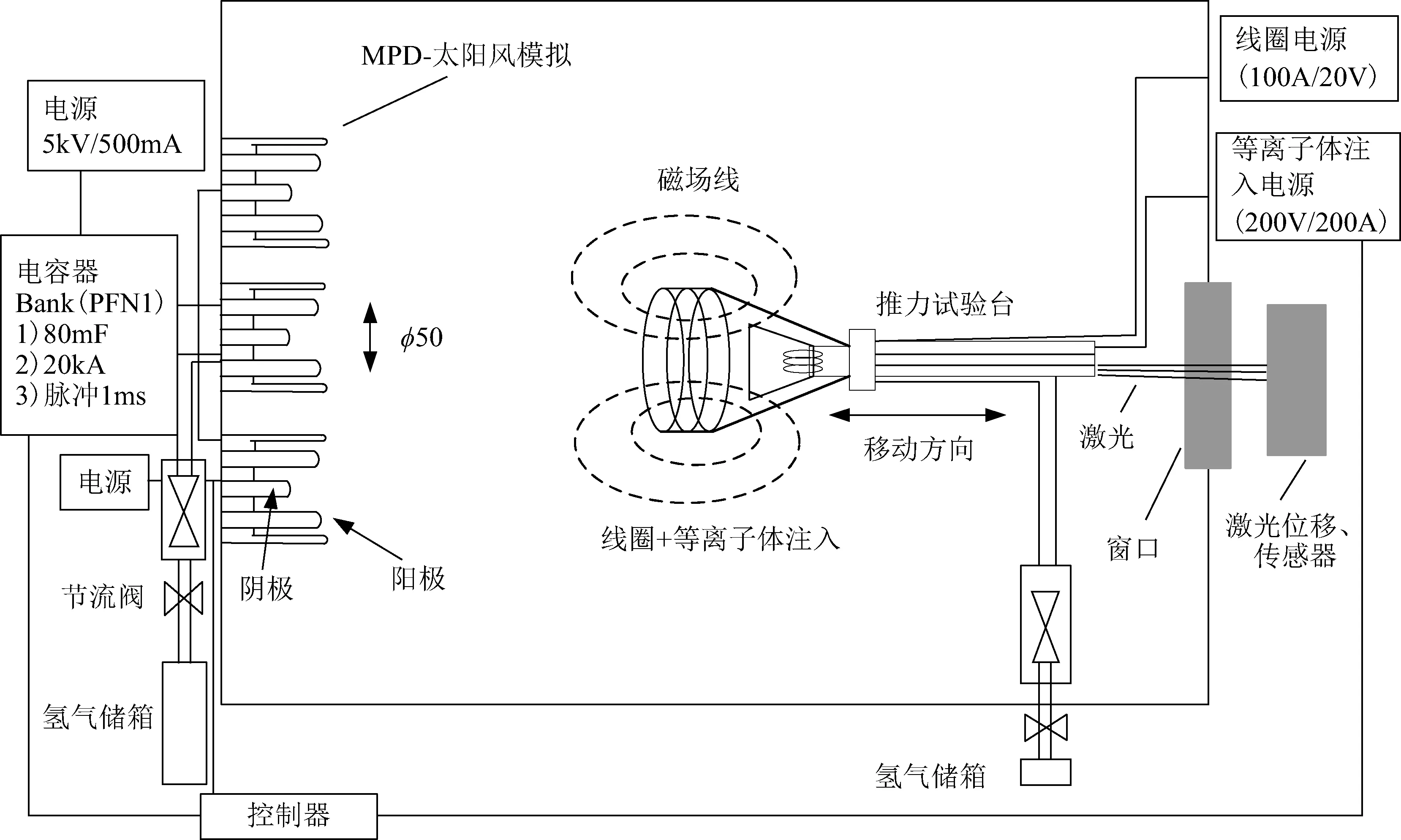
图9 磁喷嘴型磁等离子体帆试验验证装置Fig.9 Experiment device of magneto plasma sail with a magnetic nozzle
2.3 等离子体磁罩
得益于磁等离子体帆的概念,2013年美国MSNW LLC公司的David Kirtley提出了利用磁化等离子体与行星大气相互作用产生拖拽力的等离子体磁罩概念[41](Plasma Magnetoshell),如图10(a)所示,与目前主流的大气刹车(aerobraking)和大气捕获(aerocapture)技术相似,该概念主要用于轨道航天器在拥有大气的地外行星表面降落过程中的减速。等离子体磁减速罩技术的基本工作原理为:等离子体注入由螺线管产生的磁场中并被其俘获,在空间形成10 m量级的磁化等离子体区域。航天器通过绳系与螺线管相连,在航天器下落过程中,大气中的中性粒子与等离子体离子发生电荷交换作用,中性粒子变成带电离子后在磁场的作用下向线圈上施加一个作用力,该作用力可以实现对航天器的减速。
目前,NASA和MSNW已经设计了针对海王星和火星任务的一整套减速系统。分析表明,一个200 kg、直径为9 m的磁减速罩可以提供150 N的拖拽力,实现轨道速度为21 km/s的航天器着陆海王星;对于火星任务,直径为21 m的磁减速罩可以实现60 t载荷的安全着陆。目前正在发展1 kW量级的磁减速罩,原理验证试验如图10(b)所示,其核心技术是利用旋转磁场线圈激励法产生全电离、高温度(10 eV)的磁化等离子体。目前该概念的技术成熟度为2级,仍处于原理研究与验证阶段。
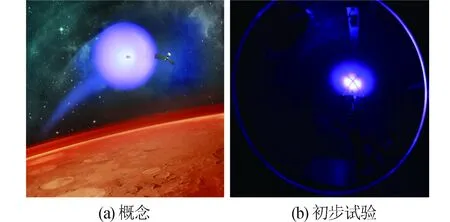
图10 磁减速罩概念及实验室初步试验Fig.10 Plasma magnetoshell aerocapture concept and its primary experiment
3 电磁帆关键技术
针对目前电磁帆的研究现状,面向未来电磁帆空间在轨应用,需要解决和突破的技术难点主要有以下6个方面。
(1) 电帆绳系加工制造技术
为了尽可能地减轻电帆本身的质量,目前单根铝材绳系的横截面直径约为25 μm,长度可达10 km,同时采用四叠的Hoytether结构来进一步提升强度,如图11所示。为了保证在如此长的长度上完成电帆绳系的精确加工制造,难度极大。目前,赫尔辛基大学研制了一套半自动超声波焊接生产线,来确保绳系焊接点的准确,但制造过程仍然十分繁琐。未来,电帆绳系的发展重点主要为研发新型绳系材料、简化绳系结构、发展新型加工方法。
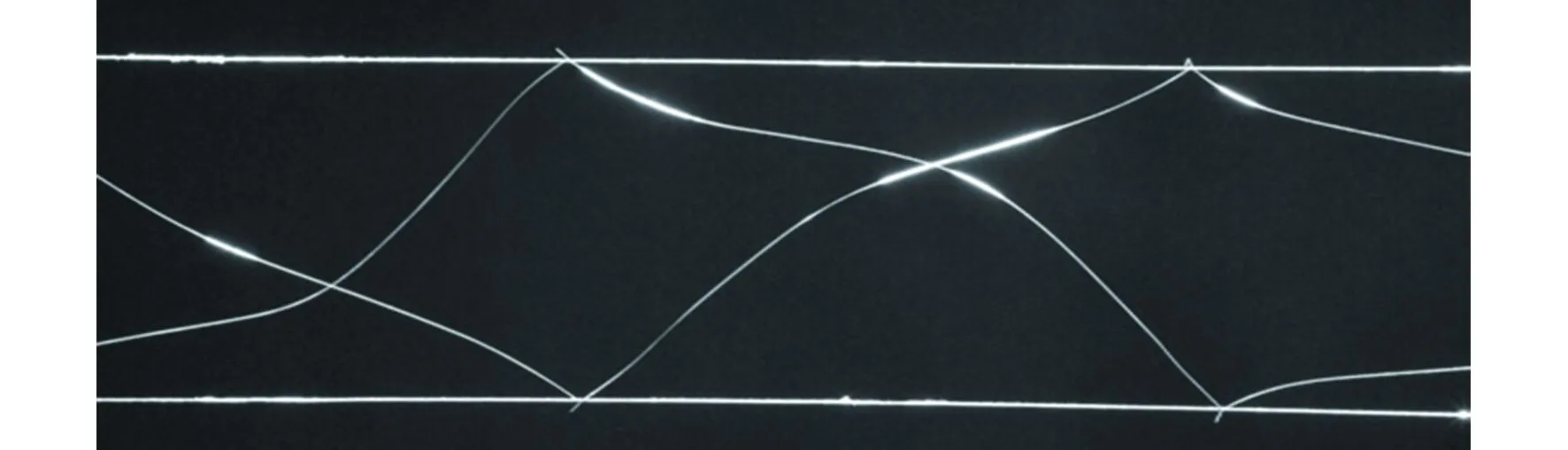
图11 四叠Hoytether结构的电帆绳系放大图Fig.11 Four-wire Hoytether
(2)电帆绳系在轨展开技术
电帆的绳系通过在旋转过程中利用离心力自旋展开,除了对绳系的机械强度有所要求外,还对绳系的展开系统提出了较高的要求。Janhunen等人计划在主绳系和辅助绳系的每个交点处安置一台小型推力器,如图12所示,通过推力器向外拖拉与电帆自旋相配合,确保电帆绳系的成功展开,避免ESTCube-1上自旋展开失败故障的再次发生。
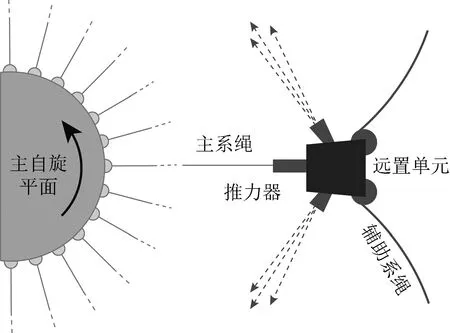
图12 配置小型推力器的电帆绳系展开系统Fig.12 Schematic top view of the electric sail with one remote unit
(3)空间低温超导技术
不论是磁帆还是磁等离子体帆,为了使其产生足够大的推力,就必须设法使得线圈携带尽可能大的电流,进而产生足够大的磁场。如采用常温铜线圈,一方面,线圈发热将会非常严重,既降低了推力的效率,也不利于在空间进行热量的管控;另一方面,笨重巨大的线圈也会降低磁帆的有效载荷,因此使用超导线圈是唯一可行的方案。然而,在空间实现低温冷却是超导线圈面临的首要问题,虽然星际空间的背景温度很低,但是由于处于真空状态,热量难以传递,因此一旦线圈局部发热严重,将会导致整个超导线圈失超。
2015年,日本京都大学的Yoh Nagasaki和JAXA的Ikkoh Funaki等人利用钇钡铜氧高温超导材料设计了一件轻质量的电磁线圈,同时对线圈在线调节的可行性进行了调研和分析[42],但距离在轨应用仍然较为遥远。
(4) 地面试验验证技术
任何类型的推力器在进行飞行验证之前,都必须在地面进行原理验证以及长时间稳定性测试,但对于电帆和磁帆而言,在地面上直接进行推力器的验证是不现实的,主要原因在于磁帆几十到上百千米的磁腔、电帆几十千米长的绳系均无法在地面真空舱中进行试验。另外,真实空间中的太阳风等离子体的密度和速度分别为5 cm-3和500 km/s左右,这与实验室中产生的等离子体的参数具有很大的差异。虽然国际上很多实验室采用了缩比模型的方式来验证磁帆的性能,但缩比过程是否合理,各种影响因素是否考虑适当,以及试验得到的推力能否外推至真实空间,目前均有待更进一步的研究和验证。
(5) 数值仿真模拟技术
世界范围内对电帆的仿真模拟方法目前还比较匮乏,相对而言,数值仿真技术在磁帆研究中已经被广泛应用并发挥了重大作用。然而,由于磁帆的磁腔尺寸变化范围非常大(几百米到几百千米),空间环境复杂,因此目前难以利用一种模型或方法来描述所有可能的磁腔尺寸。以流体近似为主的MHD方法虽然可以比较快速地给出模拟计算结果,但由于没有考虑离子和电子的粒子效应,因此并不能处理与离子拉莫尔回旋半径相当尺寸的磁腔;H-PIC方法在MHD方法的基础上考虑了离子的粒子效应,可以处理大部分的磁帆模拟问题,但对于小尺寸的磁腔,电子的粒子效应将大大影响磁帆的性能,也应当给予考虑。F-PIC方法原则上可以处理所有的磁帆问题,但在如此大的尺度上采用网格质点的粒子方法,使得F-PIC的计算时间非常漫长(如 024核CPU需要连续计算4天)。因此,发展计算快速、模型准确、结果可靠的数值仿真方法,也是目前电磁帆研究的关键技术之一。
(6) 在线推力控制技术
由于太阳风在空间的速度和密度往往是变化的,因此需要一套调控系统来实现对电磁帆推力的在线调节,包括推力的大小和方向。对于电帆,推力的大小可以通过改变绳系电压来实现,即需要对电子枪发射电子速率进行调控;对于磁帆,可以通过调节超导线圈电流和注入等离子体参数来实现推力大小的控制。相对而言,实现推力方向的调节难度更大,电帆可以通过分别控制每条绳系上的电势,使得电帆帆面上不同位置处获得的作用力不同,从而实现方向控制;同样地,磁帆通过改变超导线圈朝向或等离子体的注入方向,也可以实现推力方向的调节。然而,以上对电磁帆推力的调节和控制,往往会影响推力器的性能,同时从工程实现角度还存在诸多技术难点。
4 结束语
电磁帆作为一种新型的无工质或少工质推进技术,具有比冲高、寿命长、系统功耗小、可多模式工作等诸多优点。其中,电帆功耗小,结构尺寸大,国外开展了空间飞行试验,但尚未取得成功;纯磁帆由于工程难度大,仅停留在概念研究阶段。作为纯磁帆的改进概念,磁等离子体帆能够用较小的结构行成相当于几十千米纯磁帆产生的磁腔。国内外在数值仿真、地面试验方面开展了磁等离子体帆的相关研究,但尚未开展空间飞行试验。此外作为磁等离子体帆的扩展,磁等离子体罩也在飞行器的天体捕获方面得到了研究。几种电磁帆中,最具发展潜力及应用前景的当属工程可实现性较高的磁等离子体帆:磁等离子体帆较其他电推进具有较高的推功比且特征尺寸相当。电磁帆在未来深空探测、长时间在轨科学实验、行星减速登陆等任务中具有广阔的应用前景,对高性能电推力器研制、空间新概念推进技术发展等具有深远的意义。为提高电磁帆的工作性能和工程可实现性,需要进一步系统地开展电磁帆相关技术突破,结合我国未来需求建议对以下问题重点关注:1)电帆绳系的加工制造以及在轨展开技术;2)磁等离子体帆线圈的低温超导技术;3)在线推力控制技术;4)仿真和地面试验方法的创新性进展。