无人直升机飞控系统仿真环境概述
2019-10-15黄贤开
黄贤开
无人直升机飞控系统仿真环境概述
黄贤开
(航空工业直升机设计研究所,江西 景德镇 333001)
无人直升机飞行控制系统的主要功能是通过控制主、尾桨叶的桨距和发动机风门,以稳定直升机姿态(俯仰、横滚)和航向,控制飞行航迹(爬升、下降、巡航、左右盘旋、悬停等),实现从起飞到降落整个过程的飞行管理。由于飞控系统直接关系到无人直升机的飞行安全和飞行特性,其中飞行控制律的调参设计及仿真、系统综合集成、功能转换及故障模拟等是飞控系统研制的重点内容,因此飞控系统的研制必须具备良好的仿真环境。旨在对飞控系统各种仿真技术的优劣进行分析。
无人直升机;飞行控制系统;仿真技术;仿真系统
1 无人直升机仿真技术发展与现状
仿真技术的发展历经50多年,大致分为2个阶段[1]:①发展阶段。第二次世界大战末期,当时还没有计算机,仿真是利用实物进行,即模拟仿真,火炮与飞行控制动力学系统的研制推进了采用模拟方法进行仿真的发展,1946年第一台电子模拟的计算机研制成功。从20世纪50年代末期至20世纪60年代,洲际导弹与宇宙飞船的研制促使混合性仿真技术的进一步发展,同时仿真技术也在阿波罗登月计划等方面得到应用。②成熟阶段。当前无人直升机飞控系统仿真技术主要有两种,一种是带有部分实物的半物理仿真系统,又称为硬件在回路仿真系统(Hardware-In-Loop,简称HIL),将系统关键硬件实物接入到仿真回路,为其运行提供虚拟的控制环境[2],其又可以分为飞控计算机在回路的半物理仿真系统(如图1所示)和传感器在回路的半物理仿真系统(如图2所示);另外一种是不带任何实物的等效仿真系统(也称数学仿真系统[3]),如图3所示,所有软件均可以在一台PC机上完成。
2 不同仿真系统的组成及工作原理
2.1 半物理仿真系统
2.1.1 不含真实传感器的半物理仿真系统
不含真实传感器的半物理实时仿真环境由(实物)飞行控制计算机、小型化仿真设备(仿真机)、一台或两台PC机(或笔记本电脑)等硬件构成,配套软件包括机载飞行控制软件、模型实时仿真软件、遥控遥测软件以及仿真控制台软件。
飞行控制计算机和机载飞行控制软件为无人直升机真实的软硬件配置,实现机载实时飞行控制的功能;小型化仿真设备和仿真控制台具有模拟和监控无人直升机的动力学飞行特性以及机载传感器和执行机构等设备特性;遥控遥测软件实现遥控指令的发送和遥测信息的接收,对仿真过程进行全程监控。整套系统不仅能够实现无人直升机飞行控制的所有功能,同时也具有飞行控制计算机等关键机载设备的检测功能,主要用于无人直升机飞行控制系统的实验室、内场和外场的仿真与测试。
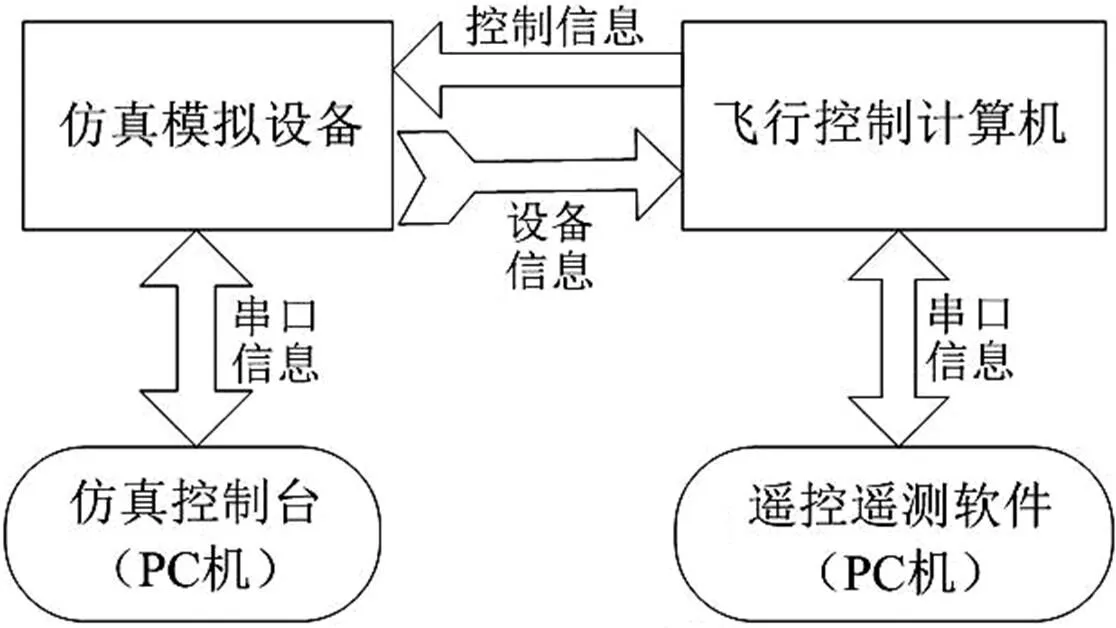
图1 半物理仿真系统框图(无真实传感器)

图2 半物理仿真系统框图(含真实传感器)

图3 等效仿真系统框图
2.1.2 含真实传感器的半物理仿真系统
含真实传感器的半物理仿真系统由(实物)飞行控制计算机、小型化仿真设备、一台或两台PC机(或笔记本电脑)、三轴转台(转台上安装垂直陀螺和角速率陀螺)构成,其配套软件与不含真实传感器的半物理仿真系统相同。
与不含真实传感器的半物理仿真系统相比,此仿真系统增加了三轴转台(垂直陀螺和角速率陀螺),这样仿真使用的陀螺信号来自于真实的陀螺,飞控计算机接收到真实的陀螺信号,进行解算,再将解算得到的控制信号发送给模型,小型化仿真设备再将姿态信号发送给转台,带动转台运动,形成闭环控制。
2.2 等效仿真系统组成
等效仿真环境由一台或两台PC机(或笔记本电脑)构成,配套软件是等效飞行控制软件和遥控遥测软件,其中遥控遥测软件与半物理仿真环境使用的软件相同。等效飞行控制软件将仿真控制台界面、模型实时仿真模块(不涉及硬件)和机载飞控软件核心控制模块等三个主要部分集成到一个软件中,忽略了硬件的约束。整套系统目的是在飞行控制系统研制过程中便于控制律设计和软件开发人员快速验证控制方案和软件功能,等效飞行控制软件中的核心控制模块与真实机载软件中的相应模块是完全一致的,可以实现软硬件开发的同步和快速集成。该系统主要用于无人直升机飞行控制系统的实验室和外场仿真与验证。
3 不同仿真系统的优劣
3.1 半物理仿真系统
半物理仿真是把控制系统中所研究的部分实物(如飞控计算机、传感器、执行机构等)接入仿真系统中进行仿真,不仅提高了仿真的逼真度,而且避免了对实物复杂特性进行数学描述和近似表达的必要性,还可以使设备自身经受与实际飞行中相似的性能试验。半物理仿真较好地解决了全实物实验和纯数学仿真两种试验方法的不足,一方面有效解决了全实物试验的成本高和风险大的缺点;另一方面又解决了纯数学仿真的精度和直观性差等缺点,为控制系统的研制(包括控制规律研究、控制参数优化、性能预测、故障诊断等)提供了非常有力的工具[4]。由此可见,半物理仿真的结果能更全面反映实际飞行控制系统的工作状态,可信度较高。
由于半物理仿真技术有良好的可控性和安全性,具有不受气候环境限制、可多次重复使用等特点,目前它已成为无人直升机控制系统在预研、方案论证或改型、设计制造和使用维护等过程中的一种重要的试验手段和技术工具。应用半物理仿真技术可以有效地缩短控制系统的研制周期,并大大降低控制系统的研制费用。
相对于其优势,半物理仿真技术的不足主要包括以下方面:由于小型化仿真设备(仿真机)既需要实现飞机模型和设备的实时模拟,又要实现设备电气接口的等效,使得系统对CPU、内存、硬件接口等方面要求高,同时又要做到小型和便携,对某些项目则显得资源不足;对于不同项目,模型实时仿真软件的开发工作量大,其中有许多重复性工作,不同点主要体现在飞机模型上的不同;小型化仿真设备的硬件接口很难做到不同项目的完全兼容,对不同项目多是要做更改,配套电缆无法兼容,且容易造成软硬件的管理混乱。
3.2 等效仿真系统
等效仿真也称之为纯数学仿真,与半物理仿真相比,等效仿真的主要优点是通用性强、仿真自动化程度高、使用方便、易于实现逻辑处理和非线性环节、参数修改容易等,即用同一套计算机设备,配以不同的仿真软件,就可以对各种不同类型的系统(如电气系统、机械系统、飞控系统等)进行仿真验证。
等效仿真是低成本、短周期研制先进水平控制系统的重要环节和手段。在飞行控制系统研制过程中,在概念设计、初步设计和详细设计阶段,一般都要采用等效仿真。等效仿真系统的不足之处主要包括:采用Windows的时钟和任务机制,不能实现实时或准实时仿真,PC机运行效率低时影响控制方案的验证效果,有时甚至出现错误的验证结果;各个模块集成在一个程序中,代码庞大不利于二次开发和维护;核心的仿真模型和控制模块不便于封装,保密性不强。
4 结束语
无人直升机飞控系统仿真技术的发展对飞控系统的研制起着非常重要的作用,它是无人直升机的飞控系统研制的重要一环,不仅可以缩短研制时间、降低成本,而且也可以为无人直升机控制律参数调整和试验试飞提供理论依据。
[1]王子才.仿真技术发展与应用[J].中国工程科学,2003,5(2):40-45.
[2]魏瑞轩,冯博琴,胡明朗.无人直升机半物理飞行仿真试验平台设计[J].飞行力学,2009,27(5):75-78.
[3]张清江,刘磊,张剑锋,等.某型直升机半物理仿真系统的设计[J].计算机测量与控制,2006,14(3):400-403.
[4]翁史烈.基于通用平台的系统建模和半物理仿真及其在舰船动力装置中的应用[D].上海:上海交通大学,2002.
V249.1
A
10.15913/j.cnki.kjycx.2019.18.041
2095-6835(2019)18-0100-02
〔编辑:严丽琴〕
