水下仿生偏振成像光学系统设计
2019-10-14刘卿卿居彩华
刘卿卿,居彩华,明 梅
(1. 南京信息工程大学 自动化学院,江苏 南京210044;2.南京信息工程大学 大气环境与装备技术协同创新中心,江苏 南京210044)
引言
近年来,光学成像技术被广泛应用于水下目标探测。实际上,在复杂的水下环境中,很多生物都具有偏振感知能力,这种视觉机制给我们提供了一种可借鉴的技术路线。海洋生物螳螂虾长期生活在水下环境中,其视觉系统已经进化到能适应复杂多变的水体环境,是世界上最复杂的视觉结构,可以同时识别线偏振光和圆偏振光,其独特的成像方式在低照度、强散射、浑浊的水体环境中成像清晰度高、对比度高,使得螳螂虾能够准确地捕获猎物,躲开天敌[1-2]。
因此,仿生螳螂虾视觉成像机制的研究日益受到水下探测研究人员的关注。1999年,N.J.Marshall等通过行为实验证明螳螂虾具有线偏振视觉,可以分清2个强度相同但偏振度不同的物体[3]。2008年,马里兰大学的T.H.Chiou等首次提出了螳螂虾视觉系统拥有区别于其他动物独特的探测和分析圆偏振光的视觉功能[4]。2014年,华盛顿大学的T.York等从螳螂虾视觉成像系统中得到启发,首次仿照螳螂虾视觉成像技术,从光学系统,处理电路和信号处理算法上对以前的传感器进行改进,制造出了仿生偏振成像相机[5]。目前,河海大学王慧斌等人对螳螂虾偏振视觉展开了研究,利用螳螂虾视觉成像技术的优势,在水下成像方面取得了很大进步,但其主要研究方向为水下图像处理[6]。
综上所述,本文旨在设计一种仿生式水下光学系统,通过模仿螳螂虾的复眼结构,设计出了水下分孔径实时偏振成像光学系统,该系统通过孔径分割的方法进行偏振成像,可以同时实现对圆偏振、线偏振、原始图像以及光强度图像的采集。
1 螳螂虾视觉偏振成像原理
1.1 偏振成像原理介绍
斯托克斯矢量法引入4个Stokes参量来描述光波的偏振信息,每个参量的量纲均与光强相同,可以直接被探测器探测[7]。光波的Stokes参量可以表示为
(1)
式中:I1,I2,I3和I4分别表示偏振方向为0°,45°,90°和135°的光强度;S0代表光的总强度;S1代表水平偏振和垂直偏振的强度差;S2代表偏振方向在45°和135°之间的强度差;S3代表光的圆偏振分量的强度差。从Stokes参量中可以直接导出偏振光的偏振度P和偏振方位角θ等物理量:
(2)
(3)
(2)式偏振度P和(3)式偏振角θ的图像都是重要的偏振信息源,测量并分析它们的图像特征可以得到目标信息。最后对S0、S1、S2、S3、P以及θ等图像进行多光学信息融合,可提高探测目标的识别率。
1.2 螳螂虾复眼结构
螳螂虾的眼睛属于并列型复眼,其视觉系统具有精密的光学结构,相比于其他动物拥有更多类型的光感受器,可以感知颜色及偏振特性[8-9],如图1所示。该复眼可以分为3个区域:中央带状区MB(mid-bandregion),背部的外围区dPR(dorsal peripheral region)以及腹部外围区vPR(ventral peripheral region),其中背部与腹部外围区小眼完成不同方向线偏振光感知,中央带状区小眼完成圆偏振光感知[10]。此外,该独特的复眼结构在感知色彩时,12种感光细胞独立运作,可以平行处理各波段的光线,具有“光谱调谐”特性,适应于水下不同环境。因此通过模仿螳螂虾复眼结构,完成线偏振、圆偏振以及光谱信息的采集,可以更有效地研究出用于表征目标偏振信号的处理机制,建立一种图像融合和处理方法。
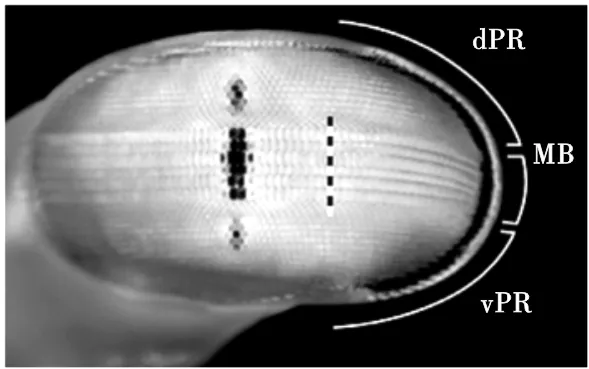
图1 螳螂虾的复眼Fig.1 Compound eye of mantis shrimp
2 系统设计
2.1 系统整体结构
考虑到仿生复眼结构紧凑性的实验要求,本系统基于分孔径[11]和分振幅[12]相结合的方法进行光学系统的结构设计。该光学系统结构由前共孔径组、无偏振分光棱镜、偏振元件组、分孔径组以及成像探测器CCD组成,系统整体结构如图2所示。

图2 系统结构示意图Fig.2 Structure diagram of system
本系统利用无偏振分光棱镜将结构分为四通道和两通道的分孔径系统,其中四通道由4个偏心子系统组成,将线偏振片分别置于4个偏心子系统的前面,使得4个通道的分孔径子系统成的像合成在探测器上,完成偏振方向为0°,45°,90°和135°的图像采集;两通道是由2个子系统组成,将圆偏振片和玻璃平板分别置于2个偏心子系统的前面,成像于探测器上,完成圆偏振和光强度图的采集。其中添加玻璃平板的目的是为了使这些偏心子系统具有相同的光学结构,并使这些分孔径子系统对称分布于共孔径组光轴四周,使其具有相同的偏心量。
2.2 系统设计参数
将该光学系统视为理想光学系统,水下光学系统物方介质为水,其折射率nw=1.33;像方介质为空气,其折射率n=1,如图3所示。

图3 光学参数Fig.3 Optical parameters
假设物方到理想镜头的成像距离为L,在该距离上要看清物高为2Y的目标,接收器对角线为2y′。则水下物方视场角为2ω:
(4)
则探测器对角线长y′为
y′=-nwf′tanω
(5)
由(5)式可以得到镜头像方焦距f′为
(6)
根据该光学系统的具体要求,确定选用典型1/2英寸的CCD探测器,其最小像元尺寸大小为8.3 μm,对角线尺寸为8 mm。该系统成像要求子孔径通道的图像同时成像于2个CCD上,因此需对CCD靶面进行分割,一幅图像占据CCD对角线的一半,尺寸为4 mm。由单个像元大小可计算出该CCD奈奎斯特频率为
根据该光学系统的实验要求,需要设计一个水下成像物镜,在水下2 m~3 m深度处对成像距离为1 m、大小为6 cm×6 cm置于水槽中的目标物体进行成像。根据使用条件,并结合图3可知,2Y=8.48 cm;L=1 m,由(4)式可知,2ω=2arctan(Y/L)=5°。已知成像探测器CCD的对角线长8 mm,即像高2y′=4 mm,根据(6)式可求得:f′=35 mm。
至此,该系统物镜的光学参数及系统工作波段、焦距、视场角和F数等基本参数如表1所示。

表1 光学系统参数
2.3 设计方法
水下物镜需考虑防水设计,典型的防水窗有2种形式:平板型和半球型[13],其结构如图4所示。从光学设计角度来说,半球型易于控制系统的像差,但半球型防水窗不易于装调,因此本文将选择平板型作为防水窗壳。在设计平板隔水玻璃时,选择材料便宜的BK7玻璃,这种材料具有优良的光谱特性和耐酸性,该玻璃的折射率为1.516 8,阿贝数为64.16,平板玻璃对系统像质影响不大,考虑本系统水下工作深度仅为2 m~3 m,取防水窗壳厚度为5 mm,口径为40 mm。

图4 典型防水窗Fig.4 Typical waterproof window
在满足设计条件的情况下,使用易于加工的球面透镜和常用玻璃材料,以节约成本,因此本系统将全部采用球面镜,其材料均来自中国玻璃库。本系统的光学设计包括3部分,分别是共孔径透镜组、子孔径透镜组和分光棱镜。共孔径组部分在结构简单的三片型物镜基础上进行复杂化并对其进行优化,得到5片单透镜,其结构参数如表2所示。子孔径成像组由2个单透镜组成,其结构参数如表3所示。考虑到加工时间和成本,其中分光棱镜选择常用的30 mm×30 mm立方体分光棱镜,其材料为BK7。

表2 共孔径组结构参数

表3 子孔径组结构参数
系统整体设计过程中,将上述3部分组合在一起,并对整体系统进行优化,得到了共孔径偏振成像单通道光学结构,如图5所示。六通道渲染光学结构如图6所示。
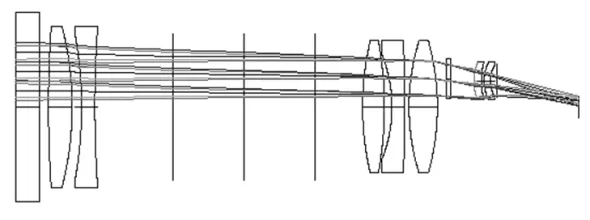
图5 系统单通道结构Fig.5 Single channel structure of system

图6 光学系统渲染图Fig.6 Optical system rendering
2.4 像质评价
该光学系统是一个水下探测光学系统,像差及成像质量的评价主要考察光学调制函数(MTF)、几何包围能量、点列斑大小和畸变曲线等等。
调制传递函数(modulation transfer function,MTF)能充分反映光学系统实际成像质量,反映出光学系统由于衍射和像差所引起的综合效应[14]。由图7可知,在CCD响应频率N=60 lp/mm处,各视场MTF值均不低于0.7,满足系统的像质要求。
几何包围能量如图8所示,其中横坐标为离点列图质心距离,纵坐标为所占的能量比例。本文选用的CCD单个最小像元尺寸为8.3 μm,光学系统全视场在单个像元尺寸下包围能量比例均大于90%。图9为畸变曲线图,光学系统的最大畸变为0.5%,完全满足本系统使用要求。
该光学系统在不同视场处的最大弥散斑半径均接近CCD探测器的最小像元尺寸8.3 μm,且一致性好,满足系统使用要求,具体参数如表4所示。

表4 各通道点列斑大小

图7 光学系统MTF曲线Fig.7 MTF curve of optical system

图8 几何包围能量Fig.8 Geometric enveloping energy

图9 光学系统畸变曲线Fig.9 Distortion curve of optical system
3 公差分析
光学系统的公差是光学系统在实际加工和装配中重要的衡量标准,直接影响着光学系统成像性能的好坏,因此合理分配光学元件的公差可以使光学系统性能达到最佳。本文利用Zemax中蒙特卡洛分析法来确定公差,即通过计算全视场下平均像差和单个视场点的像差,得到样本的名义值、最佳值、最差值、平均值和标准值,找出对像差影响较大的参数和公差[15]。表5给出系统公差分配表。

表5 系统公差给定表
对该光学系统的6个通道进行公差分析,对系统进行300次蒙特卡洛分析,分析结果如表6所示。

表6 公差分析结果
4 结论
本文通过研究螳螂虾复眼结构,结合分孔径和分振幅的方法设计了一种用于水下多路偏振信息采集的实时偏振成像系统,能够在同一时刻获取探测目标的4个角度的线偏振分量强度图、圆偏振分量强度图以及光强度图,通过偏振解算处理即可得到完整的Stokes分量图,方便后期对图像的配准和融合。系统主要由两通道和四通道偏心子孔径成像镜头组成,各个通道成像质量良好。通过MTF曲线、能量图和畸变曲线图对光学系统进行像质评价,并通过蒙特卡洛分析法进行成像质量的公差分析,结果表明,在探测器响应频率60 lp/mm处各视场MTF均不低于0.5,系统结构紧凑,体积小,可以实现对水下目标同时偏振成像。
