基于LED照明灯光的可见光室内停车场定位导航系统
2019-10-14莫巨明方俊键林浦曦陈肇杰吕泉超梁富念郑华丹钟永春方俊彬
李 锦,莫巨明,方俊键,3,林浦曦,陈肇杰,吕泉超,梁富念,3,郑华丹,3,钟永春,3,方俊彬,3,陈 哲,3
(1.暨南大学 光电工程系,广东 广州 510632;2.广东省可见光通信工程技术研究中心,广东 广州 510632;3.广州市可见光通信工程技术重点实验室,广东 广州 510632)
引言
室内停车场是静态交通的一个重要组成部分,传统卫星定位技术由于信号到达地面时较弱且无法穿透建筑物,因此无法应用于室内环境[1-2]。而RFID、蓝牙、Zigbee等室内无线射频定位技术则存在精度不高、电磁干扰严重等问题[3-4]。相比而言,基于可见光通信的室内定位技术(visible light positioning,VLP)通过LED灯发出人眼无法辨别的高速明暗闪烁信号传输定位信息,具有避免电磁干扰、"照明和定位"两用等优势[5-6],但是目前基于近似感知法、指纹识别法等定位方法[7-9]的可见光室内定位技术的定位精度和定位耗时较高,无法支持精准实时定位导航,并且需要借助额外的辅助设备,极大地提升了建设成本。因此,当前的室内停车场依然存在"停车难、找车难"的问题。本文提出一种基于LED照明灯光的可见光定位导航系统,实现了面向车辆和行人的实时高精度室内停车定位导航。该系统定位精度可达7.5 cm,最高导航速度可达17 km/h,支持车辆或行人在室内停车场内的实时定位导航,能有效解决室内停车场停车难和找车难的问题,推动智能交通的发展。
1 系统架构
定位导航系统架构如图1所示。系统主要由可见光定位LED灯具、智能手机和定位导航软件3部分组成。定位LED灯具由LED照明灯具和信号调制驱动器组成,信号调制驱动器驱动LED照明灯具在满足照明要求的同时,将灯具的位置信息经过编码调制后加载到灯光信号上广播发送;智能手机作为定位信息的接收终端,利用前置摄像头捕获可见光定位信号,从中提取该信号来源灯具的位置信息,进而在定位导航软件中进行定位计算等步骤,获取并显示车辆或行人的当前位置信息以实现定位功能。另外,通过结合用户选择的目标车位和当前位置信息,定位导航软件规划设计最佳路径,引导车辆或行人移动至目标车位,从而实现导航功能。

图1 系统架构图Fig. 1 System architecture
2 系统硬件设计
系统硬件主要由可见光定位信号发送端(可见光定位LED灯具)以及可见光定位信号接收端(智能手机)组成,如图2所示,系统无需额外的硬件辅助设备。可见光定位LED灯具基于普通的市售LED灯具发送可见光定位(VLP)信号,降低了系统建设的复杂度和改造成本。定位LED灯具中内嵌微控制器将灯具所对应的预分配唯一标识符(unique identification,UID)经过可支持多级调光的无闪烁线路编码[9],得到满足IEEE建议的照明要求[10],且编码效率相较IEEE标准[11]有更高的编码码字,再通过LED驱动器以开关键控(OOK)调制方式控制LED灯具“开/关”,实现可见光定位信号的发送。
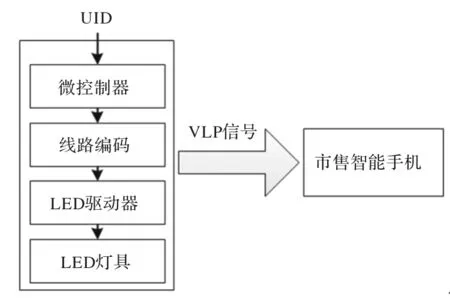
图2 系统硬件Fig. 2 System hardwares
在可见光定位信号接收端,系统采用了市售的智能手机进行信号接收和信息提取,降低了用户成本。智能手机通过手机内置的CMOS摄像头作为光电传感器接收可见光定位LED灯具发出的可见光定位信号,利用卷帘快门效应将时域上的脉冲信号转换为图像平面上的条纹图案,进而采用图像处理算法提取位置信息给定位导航软件做进一步处理,以实现定位和导航。
3 系统软件设计
3.1 定位导航软件的功能模块
本系统所使用的定位导航软件主要包括LED灯光信号获取模块、LED灯光信号解析模块、定位模块、导航模块与地图显示模块,系统软件框图如图3所示。各模块主要功能如下:
LED灯光信号获取模块功能是,驱动智能手机的前置摄像头对LED灯发出的可见光定位信号进行连续抓取以获得条纹图像;LED灯光信号解析模块功能是,对所获取的条纹图像进行图像预处理并解码位置信息,计算获得高精度的位置坐标;定位模块功能是,根据位置坐标参数在地图显示模块上进行标记,并实时向导航模块发送位置更新信息;导航模块功能是,接收定位模块的位置坐标,根据用户请求的目标位置和当前的位置坐标计算最优路径;地图显示模块功能是,载入并显示停车场地图,在地图上显示用户实时位置、规划路径和车辆已走过的路径。
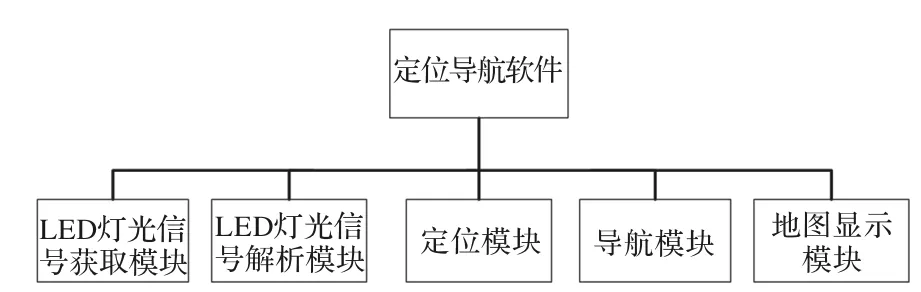
图3 系统软件框图Fig. 3 System software block diagram
3.2 定位导航软件的工作流程
当车辆或者行人进入室内停车场并开启定位导航软件后,智能手机前置摄像头开始捕获停车场LED灯具条纹图像,同时经过图像处理滤除非可见光定位LED灯具产生的背景光以免除干扰,并通过一种轻量级图像处理算法[9]对条纹图像进行预处理、条纹区域定位提取并解码得到灯具对应的UID,通过基于视觉分析的定位算法计算出车辆或者行人的当前所在位置并显示在软件终端,从而实现定位。当用户选择目标车位,通过Dijkstra最短路径算法[12]提供当前位置到目标位置的最短路径,为车辆或者行人提供导航服务。系统软件工作流程如图4所示。
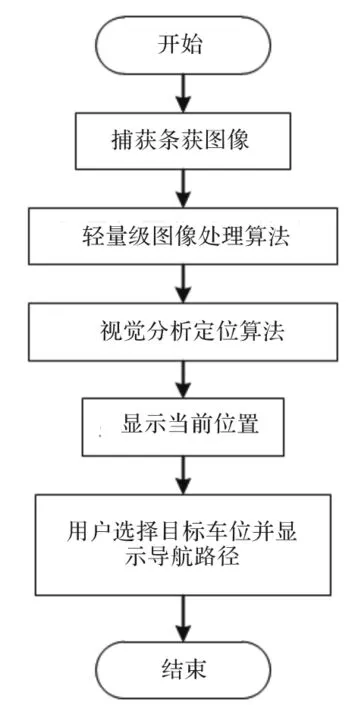
图4 系统软件工作流程图Fig. 4 System software working flow chart
3.3 系统的定位算法
智能手机前置摄像头捕获条纹图像后,通过查找“UID-坐标”映射表检索相关联的坐标信息,从而实现定位导航。当仅捕获一个可见光定位LED灯具时,可简单通过与UID相关联的坐标实现定位,定位精度取决于灯具之间的距离。通常情况下,摄像头视场角内能捕获2个及以上的灯具条纹图像。此时优先提取最先找到的2个灯具条纹图像,通过采用视觉分析获取更为精准的位置,基于视觉分析的定位算法原理如图5所示。
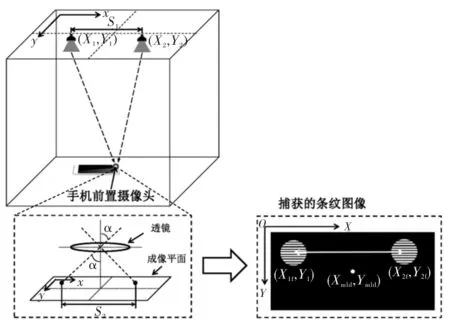
图5 基于视觉分析的定位原理Fig. 5 Positioning principle based on vision analysis
假设车辆或行人当前位置的物理坐标为(X,Y),2个LED灯具的物理坐标分别为(X1,Y1)和(X2,Y2),且灯具间的物理距离为S1。通过摄像头捕获得到包含2个灯具条纹的图像,在像素平面中,设图像左上角为像素坐标系原点,并记图像中心为像素坐标(Xmid,Ymid),2个灯具条纹中心点的像素坐标分别为(X1f,Y1f)和(X2f,Y2f),且中心点间的像素距离为S2。在不同的定位坐标(X,Y)下,捕获到的2个条纹图像中心的像素坐标(X1f,Y1f)和(X2f,Y2f)不同。
根据如下几何关系:
(1)
可求得当前定位坐标(X,Y)为
(2)
4 性能测试与实验结果
以本单位的地下停车场为实验场地进行演示验证系统测试,测试所提出的基于可见光通信室内定位的智能停车系统在定位精度、定位耗时以及导航速度方面的性能,并基于Android手机开发了面向室内停车场泊车引导和反向寻车的可见光定位导航App。实验测试环境参数与演示现场如图6所示。
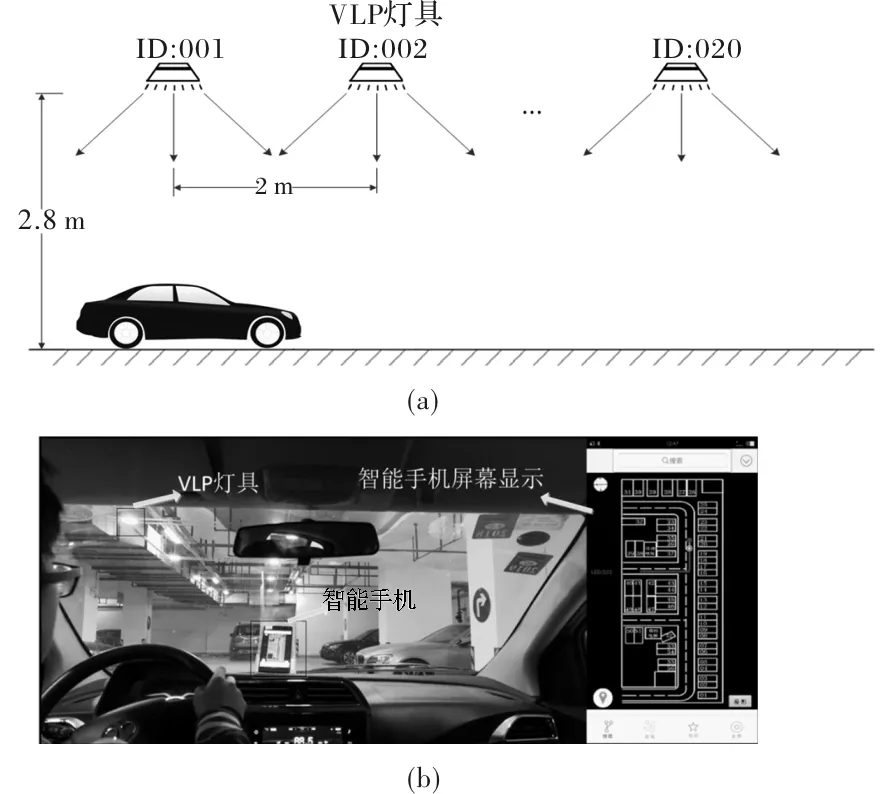
图6 实验测试环境与演示现场Fig. 6 Experimental test environment and demonstration site
可见光定位LED灯具按照灯具距离地面垂直距离2.8 m、灯具水平间距2 m进行布局安装,定位LED灯具的硬件参数如表1所示。
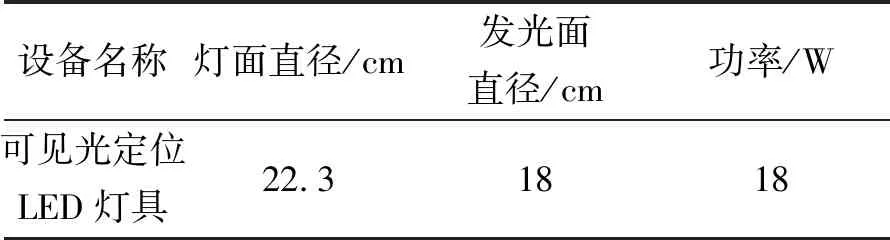
表1 可见光定位LED灯具的硬件参数
智能手机放置在车辆控制台或行人手中用于接收可见光定位信号,并通过本文开发的定位导航软件实现泊车引导或者反向寻车时的定位导航。本次实验测试所用智能手机的硬件参数如表2所示。
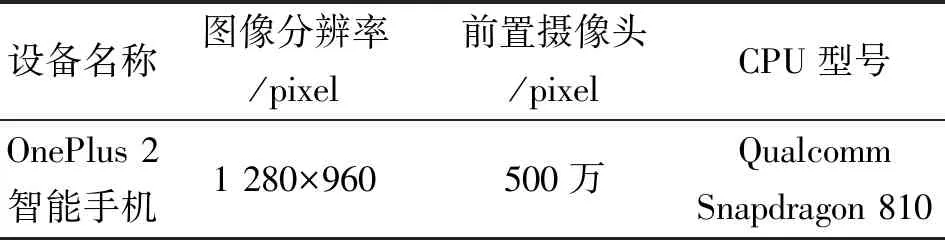
表2 智能手机的硬件参数
4.1 定位精度
定位精度体现了车辆或者行人在室内停车场进行定位导航时的准确性。本次实验在现场环境中随机选择100个位置,通过将定位导航软件的估计位置和实际空间位置进行对比得到当前位置的定位误差。定位误差(e)及其累计分布函数(CDF)的关系如图7所示,其中CDFe(Ac)=P(e≤Ac)。从图7可见,定位误差的上限为10.7 cm,平均定位精度为7.5 cm。相对基于射频室内定位技术的室内停车场定位导航系统[13-14],以及基于图像传感器的可见光定位技术[15],本文所提可见光室内停车场定位导航系统具有更高的定位精度。
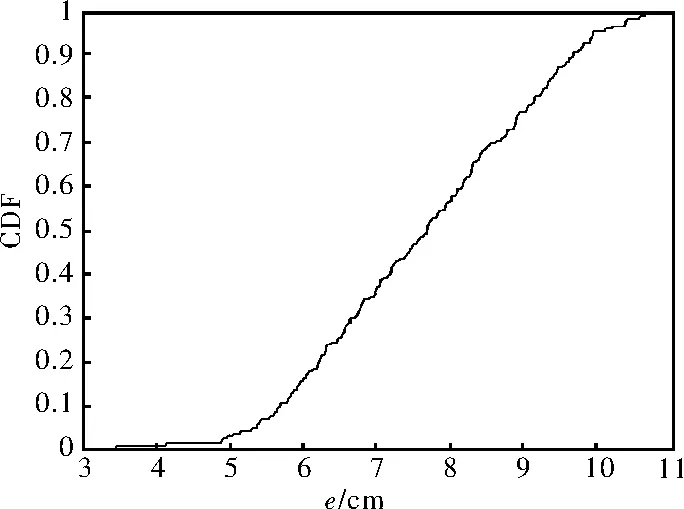
图7 系统的定位精度Fig. 7 Positioning accuracy of proposed system
4.2 导航速度
导航速度反映了车辆或行人在室内停车场定位导航时,系统所支持的最大移动速度。结合本单位地下停车场的车位分布信息和定位导航算法,基于Android智能手机开发了定位导航软件。如图8所示,当用户选择目标车位后,软件采用Dijkstra算法进行路径规划。随着用户的移动,定位导航软件上实时更新用户位置,并持续引导用户向目标车位前进。图8中从A到C为推荐路径,A到B表示用户经过的路线,而B到C表示到达目标车位的剩余路径。
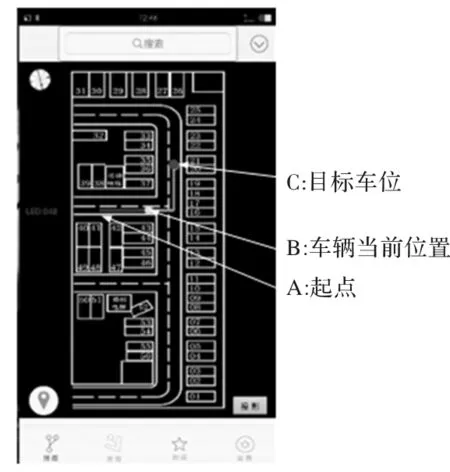
图8 可见光室内停车场定位导航APP Fig. 8 An Android application of the visible light indoor parking lot positioning navigation system
基于所开发设计的室内停车场定位导航软件,通过不断增加车辆移动速度,观测在不同速度下的解码成功率,从而得到系统所支持的最高导航速度。从图9可知,当车辆速度介于0~17 km/h时,解码成功率可达90%以上,因此本系统支持车辆或行人在17 km/h的移动速度下进行定位导航,满足室内停车场定位导航系统的实际需求。
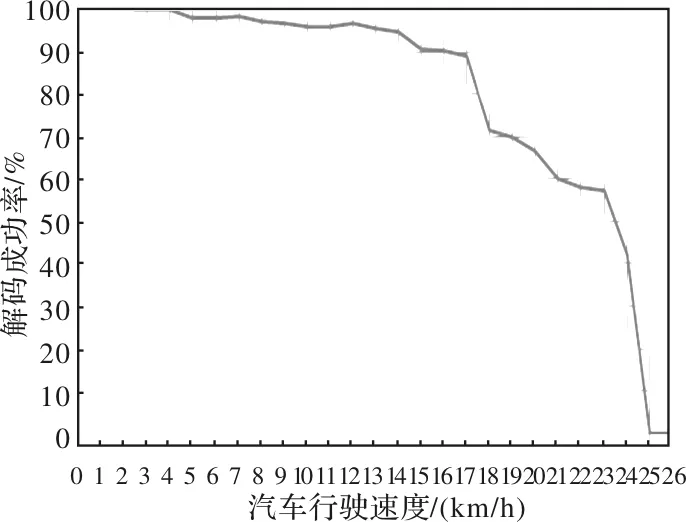
图9 不同移动速度下的解码成功率Fig. 9 Decoding success rate under different moving speeds
5 结论
设计了一种基于LED照明灯光的可见光室内停车场定位导航系统,系统的定位精度可达到7.5 cm,可支持时速高达17 km/h的车辆实时室内定位导航,为室内停车场提供实时高精度的定位导航服务,能够有效解决室内停车场停车找位难及反向寻车难的问题,提高车位利用率和释放率,从而推动静态交通发展。
