基于知识辅助的海面目标航迹起始方法
2019-10-09鞠振飞胡国光
鞠振飞,宫 政,胡国光
(1.海军装备发展部上海局,上海200041;2.海军航空大学,山东烟台264001)
海面多目标跟踪技术作为提高我国海上探测能力,保障海防的有力手段,是国家一直以来重点发展的技术方向之一,而航迹起始[1-2]作为海面多目标跟踪技术的首要环节,使其尽可能准确地起始真实目标的航迹,抑制虚假目标起始航迹,这是改善海面多目标跟踪性能的有效途径。因此,海面多目标航迹起始技术日益受到国内外学者和科研工作者的广泛关注[3-5]。
Hough变换方法由于具有对复杂海面目标背景下海杂波强鲁棒性[6]的优点,受到大量学者的关注,但在航迹起始,其应用会存在严重的航迹簇拥现象[7-10],导致航迹起始参数准确性较低。为了解决该问题,有学者提出多尺度聚类[11-13](MSC)的方法,通过对Hough变换低阈值初选后的航迹参数进行变尺度寻优,自适应确定航迹起始数目和航迹起始参数,有效提高了航迹起始的准确性,但计算量异常庞大,难以工程应用,且未考虑观测数据质量对航迹起始带来的影响。而实际上,由于目标姿态、雷达天线方向图、背景杂波等多方面因素综合影响,雷达观测的数据质量是存在差异的,这种差异性恰恰反映了雷达观测的真值性,会对海面目标航迹起始产生重要影响。因此,研究观测数据质量对海面多目标航迹起始的影响具有重要意义。信号幅度(由雷达测得并通过信号处理器输出端输出的信号强度)作为雷达信号处理从大量回波中检出目标真实观测的重要知识依据,是研究观测数据质量的重要方面,也是本文的重点研究依据:即同等条件下,信号幅度越强,目标真实回波的特征就越明显,抗虚警能力就越强,雷达观测数据质量越高,其为目标真值的可信度越高。
信号幅度作为先验知识信息用于辅助跟踪是由D.Lerro、Y.Bar-Shalom 等学者提出,即利用幅度知识来改进数据关联算法,提高跟踪性能[14-15];2006 年,Simon Haykin 教授提出利用包括幅度知识在内的辅助知识来实现认知雷达的概念[16];2016 年,有学者提出通过建立幅度似然函数将幅度知识引入到多伯努利滤波的更新过程中,提高了多目标估计精度[17];接着,有学者提出将幅度知识用于数据关联,以提升复杂环境下的海面多目标跟踪性能[18-19];2018年,有学者提出利用幅度知识和多普勒知识等多特征联合辅助多目标跟踪,提高了多目标跟踪精度[20]。
综上所述,幅度知识用于辅助海面多目标跟踪研究,主要集中在辅助航迹关联方面,而在航迹起始方面的研究很少。本文通过将幅度似然比函数与观测数据质量建立联系(同等条件下,幅度似然比越大,抗虚警能力越强,观测数据质量越高,其为目标真值的可信度越高)提出了一种基于知识辅助的海面目标航迹起始方法。该方法首先利用先验知识幅度信息计算幅度似然比,以幅度似然比的大小来表示观测数据质量的高低;然后,利用幅度似然比辅助Hough 空间参数积累,并对航迹初选参数进行初值修正,提高Mean Shift 多尺度聚类滤波初值的准确性,减少迭代次数;最后,通过最优筛选的方法自适应得到目标真实起始信息。
1 基本原理
基于知识辅助的海面目标航迹起始方法流程图如图1所示。

图1 基于知识辅助的海面目标航迹起始流程图Fig.1 Outliers sea multi-target track initiation based on future knowledge block diagram
上述方法的具体实现步骤如下。
1)Hough 空间参数积累。对Hough 空间进行Δθ×Δρ 的参数划分,设第k 行m 列的参数空间子单元中心坐标为( θk,ρm),其中:
根据Hough 变换理论,对参数子单元( θk,ρm)投票,得票越高,对应的航迹参数可信度越高,不妨记( θk,ρm)的投票结果为B( k,m )。



式(4)中:xi和yi为第i 个观测在x 向和y 向的位置信息;θk和ρm为单元长度Δθ×Δρ 的第k 行m 列个子单元的θ 参数中心坐标和ρ 参数中心坐标。





根据式(7)得到ρm参数对应m 的修正值为:

4)Mean Shift多尺度聚类。步骤3)得到的基于幅度信息的一次修正初选航迹参数集的分布直方图为:

根据尺度空间理论,f( )x 的多尺度聚类表示为:

式(11)中:x 为空间位置坐标信息;⊗为卷积因子;

5)最优尺度筛选。根据步骤4)得到的聚类分析结果,以生存时间最长的聚类数目为最优聚类数目,以聚类中心漂移速度最小的聚类中心为最优聚类尺度,则对应的聚类中心即为最优聚类中心。

式(15)中,τ(c)为聚类数目c 的生存周期。
式(17)中:z(σ)为聚类中心的漂移速度;vip为第i 个聚类中心的第p 维分量。
2 仿真分析
为了验证本文所提算法的有效性和优越性,本文主要从以下仿真数据详细分析和说明。
2.1 仿真环境设置
2.2 仿真评价指标
经过M 次蒙特卡罗仿真,其中第i 次仿真起始了ni条航迹,则ni条航迹中目标真实航迹全部起始的标志为:

式(18)中,Ii,j,t=1 表示起始航迹为目标t 的真实航迹,否则,为虚假航迹。
评价指标分别为:
4)运行时间tM=单次蒙特卡洛仿真时间。
2.3 仿真结果
首先,对传统阈值Hough变换航迹起始方法存在的航迹簇拥现象进行仿真说明,见图2。其中,图2 c)航迹簇拥现象十分严重,图2 d)虽然航迹簇拥现象得到一定缓解,但簇拥依然存在,图2 e)虽然航迹簇拥现象消失,但出现了航迹丢失状况。可见,标准阈值Hough变换方法难以达到令人满意的航迹起始效果。
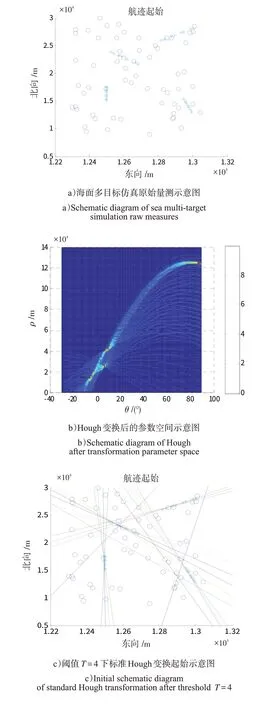

图2 不同阈值下Hough变换航迹起始示意图Fig.2 Track initiation curves of Hough transformations with different thresholds
其次,对本文方法进行仿真说明。图3 a)为多尺度聚类迭代滤波阶段尺度参数σs与聚类数cs的关系示意图,可见聚类数cs=4 的生存时间最长,因此航迹起始的真实数目为4 条,图3 b)为最优尺度参数下得到的目标真实航迹起始效果图。


图3 基于知识辅助海面目标航迹起始示意图Fig.3 Simulation figures of sea target track-initiation based on future knowledge
2.4 提升效果分析
仿真对航迹起始效果的影响——提升航迹起始准确度。
由本文基本原理部分可知,检测概率、虚警概率和检测门限存在对应关系,即

幅度杂波服从参数为1+d 的瑞利分布模型。
可见,同等条件下,检测概率越高,则检测门限相对越低,幅度似然比越高,目标观测被检测为真实观测准确度越高。
以下分别在检测概率PD=0.8 和PD=0.9 情况下,验证幅度信息对航迹起始效果的影响。
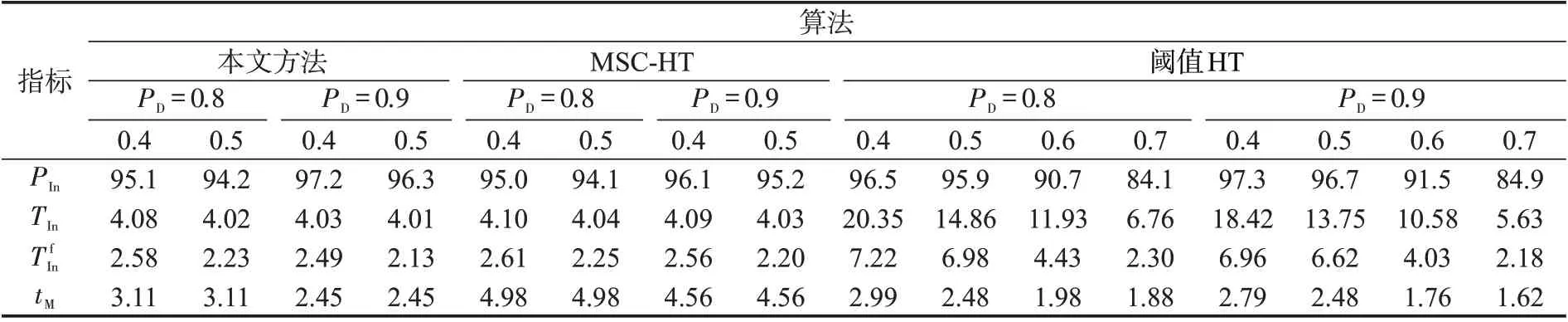
表1 本文方法与MSC-HT、阈值HT的起始性能统计Tab.1 Performances of the proposed method,the MSC-HT method and the HT method threshold
由表1分析得到:
1)提高航迹起始概率PIn准确度。结合航迹起始平均条数PIn,可知,随着阈值T 的增大,阈值HT方法的航迹簇拥现象得到改善,但当阈值T >0.6 时,阈值HT方法的PIn<85%,导致航迹起始概率过低,说明不能完全依靠提高阈值的方法来解决航迹簇拥问题,需要采用本文方法或MSC 方法等解决HT 低阈值初选带来的航迹簇拥问题。由表1 可以看出,当阈值T 分别取0.4和0.5时,阈值HT方法平均起始概率PIn虽然高于本文方法和MSC-HT 方法,但阈值HT 方法起始了许多簇拥航迹,航迹起始数目与目标真实航迹数目明显不符,而本文方法和MSC方法航迹起始数目十分接近目标真实航迹数目,且本文方法的起始概率PIn优于MSC方法。因此,本文方法起始概率PIn综合优于阈值HT方法和MSC-HT方法。
2)提高航迹起始平均条数TIn准确度。在检测概率PD=0.8,阈值T 分别取0.4 和0.5 时,阈值HT 方法航迹平均起始条数TIn为20.35和14.86,与目标真实航迹条数4条相比,每个目标平均起始了4条航迹,航迹簇拥现象严重;MSC-HT 方法分别为4.10 和4.04 条,十分接近目标真实航迹条数4 条,航迹簇拥现象得到明显改善;而本文方法分别为4.08和4.02条,比MSCHT 方法更加接近目标真实航迹条数,航迹簇拥现象得到进一步改善,说明幅度似然比对虚警信息起到了压制作用:一方面,减小了数据质量低的观测对航迹起始过程的低可置信度影响;另一方面,增大了数据质量高的观测的高可置信度影响。
检测概率PD=0.9 时,阈值T 取0.4 时,相对于PD=0.8,本文方法航迹平均起始条数TIn相对准确度提升1.3%,高于MSC-HT 方法(0.2%),低于阈值HT方法(9.4%);本文方法TIn准确度提升高于MSC-HT方法,进一步反映了本文算法的有效性和优越性,随着检测能力的提升,幅度信息辅助起始对虚警抑制优势更加明显,对起始准确度提升有加成作用;而本文方法TIn准确度提升数值上低于阈值HT方法,是因为本文方法和MSC-HT方法的航迹平均起始条数TIn已经很接近真实目标数目4,提升空间很小,而阈值HT方法平均起始条数TIn为20.35条,远高于真实目标数目4,提升空间很大。因此,检测概率提升带来的小的提升就会导致TIn准确度明显的提升。而实际上,TIn由20.35条提升至18.42条仍然存在严重的簇拥现象,综合准确度提升效果不佳。
显然,本文方法航迹起始平均条数TIn准确度优于阈值HT 方法和MSC-HT 方法,幅度信息对航迹起始带来了准确度提升的优良效果。
4)提高运行时间tM效率。本文方法的运行时间tM虽然略高于阈值HT方法,但大大改善了阈值HT存在的航迹簇拥现象;与MSC-HT 方法相比,tM明显降低。可见,本文方法的综合运行时间效率优于阈值HT方法和MSC-HT方法。

3 结论
针对用于航迹起始的批雷达观测存在数据质量差异问题,提出一种基于知识辅助的海面目标航迹高准确度起始方法。该方法以基于先验知识幅度信息的幅度似然比大小衡量雷达观测的数据质量差异,解决了航迹起始的数据质量问题,提高了航迹初选参数初值的准确性,利用Mean Shift 多尺度聚类方法解决了低阈值航迹簇拥问题。仿真结果表明,与阈值Hough 变换方法相比,密集杂波环境下基于幅度特征的航迹高准确度起始方法有效解决了低阈值航迹簇拥问题,并且能够自适应地确定航迹起始数目和航迹起始参数,有效提高了航迹起始准确度,且在运算速度方面是实时可行的。因此,在海面多目标航迹起始中有广阔的应用前景。
