基于人工神经网络的多模型目标跟踪算法
2019-10-09王子玲贾舒宜修建娟陈小慧
王子玲,贾舒宜,修建娟,陈小慧
(1.海军航空大学,山东烟台264001;2.潍坊市技师学院,山东潍坊261021)
机动目标跟踪一直是目标跟踪领域的研究难点和热点[1-2]。机动目标跟踪算法中根据模型数目可以分为单模型跟踪算法和多模型跟踪算法2种[3-4]。单模型跟踪算法主要以Singer 模型算法[5]、Jerk 模型算法[6]和“当前”模型算法[7]为代表,该类算法在目标进行简单的机动时精度高,但适应能力差,须提前估计目标大致运动模型或参数,一旦目标出现未知的机动形式或是机动形式复杂其误差就会明显增加甚至跟踪发散[8-9];多模型算法主要以交互式多模型算法(Interacting Multiple Model)[10-11]为代表,该类算法将多种模型进行混合加权得到最终跟踪结果,其在理论上只要模型集足够完备,就能跟踪所有形式的机动目标,并且不需要机动检测,具有适应和自主判断目标未知机动形式的能力,因而得到了广泛应用和研究。但是,其缺点在于,过多的模型会导致计算的浪费,模型数目太少则覆盖目标可能的机动形式不够;另一方面,多模型算法还存在模型固定和非匹配模型削弱整体跟踪精度和模型切换存在延迟造成跟踪精度下降的缺点[12-13]。随着科技的发展,目标的机动能力不断提高,机动形式愈发复杂,传统的跟踪算法越来越难满足实际应用需求。
因此,目标跟踪的关键点之一为实时、精确地估计目标的真实机动形式。人工神经网络[14-15]具有很强的非线性拟合能力、学习能力和一定的联想、记忆能力,使用人工神经网络进行目标的机动形式识别和估计具有较大的优势和合理性。
在此背景下,本文提出了一种基于人工神经网络的多模型目标跟踪算法(Multiple Model Algorithm based on Artificial Neural Networks,ANN-MM)。通过研究几种基本目标运动形式的轨迹特点,设计出了目标轨迹特征向量。利用训练好的BP 神经网络[16-17]对一定大小滑窗内的目标轨迹段进行运动模式识别,根据结果进行模型切换,从而达到适应目标机动形式的目的。仿真结果证明了算法的有效性。
1 目标轨迹特征向量
简单而有效的特征向量是保证人工神经网络训练与识别效率和正确率的关键。由于目标的位置点与目标轨迹的起点有直接关系,起点影响着整个轨迹位置点数值大小,同样的运动模式的轨迹不同起点时目标位置点的数值会有较大差别。也就是,直接采用目标位置点作为轨迹运动模式识别的依据是存在困难的。因此,要想有效地对目标轨迹进行运动模式的估计,就得消除起点对目标位置点带来的数值影响。
本文采用目标位置点向量来进行轨迹特征的生成。令k 时刻目标轨迹的位置点向量为Sk,令k+1时刻与k 时刻的位置向量差,即相邻时刻位移向量为:

研究分析目标3种基本的运动模型[18]:匀速(Constant Velocity,CV)模型、常加速度(Constant Acceleration,CA)模型和协同转弯(Coordinate Turn,CT)模型。在这3 个模型中目标分别进行匀速直线、匀加速直线和按一定转弯率进行曲线运动。特别指出的是,为了研究的方便,本文中的CA 模型加速度可以与目标速度方向不一致,即在此模型下,目标轨迹可以是曲线的。可以发现,不同模型的的模和方向变化规律存在差别,因而可以利用生成轨迹的特征向量。假设轨迹段长度即位置点数目为m,i=1,2,…,m-1,则关于模的特征向量为:

式(2)中:



式(4)中:

为了增强特征向量的表现力,再给位移向量的模和方向变化各加一维特征fs0和fa0:

因此,最后可以得到目标轨迹的特征向量为:

根据式(9),可以计算得到长度为m 的轨迹段得到的轨迹特征向量的维度为:

根据轨迹特征向量F,可以根据不同的运动模式分析特征向量具体数值表现,将3 种基本运动模型同其特征向量数值表现归纳为表1所示,其中,ω 为转弯率。
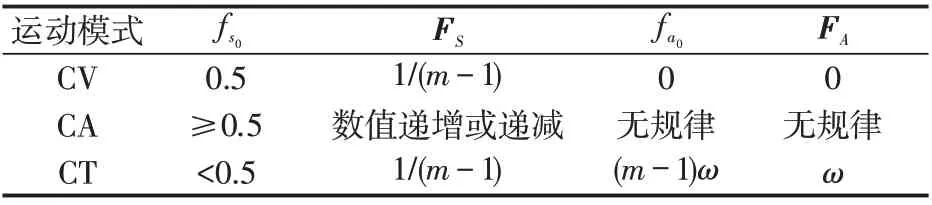
表1 目标运动模式对应的特征向量Tab.1 Feature vectors corresponding to the target motion mode
因此,根据表1可以看到,特征向量F 对不同运动模式具有较明显的区别,这说明采用人工神经网络对其进行学习是可行的。
2 模型参数传递和训练样本生成
2.1 模型参数传递
本文的算法原理为人工神经网络估计出跳窗内目标轨迹段运动模式后,系统则切换到相应的模型进行状态估计。但这样就存在模型与模型之间参数如何传递和初始化的问题,主要为状态向量和协方差矩阵的传递问题。由于不同模型之间存在状态不同和维度的差异,因而其模型之间参数传递就须进行研究分析。
为了便于问题直观分析和简化,本文假定目标只有3种运动模式:CV、CA、CT(目标不同转弯率即为不同的CT 运动模式);同时,假定目标在二维笛卡尔直角坐标系中进行运动。因此,CV和CT模式下目标状态向量为X(k)=[xkx˙kyky˙k]T,而CA模式下目标状态向量为X(k)=[xkx˙kx¨kyky˙ky¨k]T。根据3种模式的目标状态向量以及其相应的状态转移矩阵,确定了以下3条模型参数转移规则。
1)模型未切换时,所有参数和状态直接转移和继承。
2)同维模型参数直接继承和转移,即CV和CT模型的状态向量和协方差矩阵可以直接继承和传递;而CA 模型向CV 或CT 模型进行切换时,由于高维向低维切换,直接将状态向量和协方差转移矩阵中关于加速度的量截去即可。
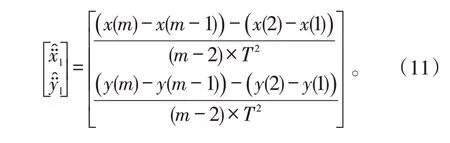
3)CV 或是CT 模型向CA 模型切换时,由于低维向高维切换,其加速度部分参数就须进行初始化。本文的识别是采用跳窗的模式,即将轨迹分成均匀小段进行状态估计,在窗口长度设计合理时,可以认为窗口内目标加速度未发生突变的(即使突变,其损失也较小),因而将加速度初始化为窗口内加速度平均值是合理的。假定m(m >2)长度的窗口内目标量测值为Z(k)=[x(k) y(k)]T,k=1,2,…,m,采样间隔为T ,则模型切换为CA模型时加速度初始值为:
而对于协方差矩阵,可以利用卡尔曼滤波中对加速度协方差的初始化[19]部分进行初始化。但在仿真中发现,这样得到的协方差由于初始化部分数值过大,可能会造成滤波不稳定。因此,将协方差矩阵中数值最大的加速度方差部分降低,从而降低对滤波稳定性的影响。假定CV 或CT 模型轨迹段最后一个采样点的协方差估计值为:
令量测协方差矩阵整个目标跟踪过程中不变,为

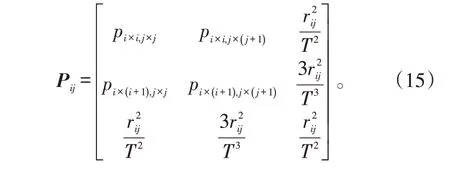
则CA模型的协方差初始值为:

其中,Pij(i,j=1,2)为:
这样就完成了模型之间参数的转移和初始化。
2.2 训练样本生成
为了更加便于研究本文算法的性能,其人工神经网络的训练样本采用构造的轨迹。

本文算法的跟踪对象为舰船、汽车等此类机动模式简单、速度较低的目标。这类目标在运动的某一时间段内,其运动模式是单一的,利于神经网络的训练和运动模式识别。
每种运动模式中,为提高数据有效性,采用不同的轨迹起点、初速度(加速度)的轨迹段。本次仿真采用的滑窗长度为10个采样点,因而产生的轨迹段的长度为10 个采样点。然后,进行数据提取,再进行特征向量的产生,每种运动模式产生训练数据400组。
在进行实际的目标跟踪时,肯定要面临噪声干扰的问题。因此,为了使人工神经网络具有一定的抗噪声能力,需要让人工神经网络学习带有噪声的训练样本。在前面已述的运动应用场景前提下,在本文中每种运动模式分别加上方差为0、5、10、20、40 的0 均值高斯白噪声(量测噪声,基本单位为m2),即每种模式产生5种噪声水平的训练数据。对训练数据加上噪声时,每个滑窗进行单独的噪声叠加,这样可以最大程度的利用数据。因此,总共可以产生8 000 组训练数据。
为了减小量测噪声的影响,在窗口内的轨迹段进行特征向量的计算之前,将量测数据相邻2 个进行求平均处理,去除一部分量测噪声,则平均量测为:

经过式(16)的处理,目标轨迹的特征向量F 的维度重新变为:

本文中,采用BP 神经网络来进行目标运动模型的识别。BP神经网络结构[16]设置为4层结构:一层输入层,两层隐层,一层输出层,两层隐层的维度分别为10和6。采用窗口长度为10个采样点,因而轨迹特征向量的维度为17,即输入层的维度为17;因有4 种模型,采用0、1 输出模式,即正确模型为1,其他为0,所以输出维度为4(进行识别时,由于输出一般情况下不为整数,直接取具有最大输出数值所在位置即可)。训练时,次数设置为50 000 次,训练目标设置为0.03。按照参数设置利用训练数据对BP 网络进行训练,得到需要的网络。
3 仿真结果和讨论
3.1 ANN-MM算法抗噪声能力分析
在将ANN-MM算法与其他传统算法比较性能之前,须要对算法本身性能进行分析,主要是其跟踪效果随着量测噪声方差增大的变化情况。
为了使结果合理可信,本文仿真使用的目标轨迹包含了前面训练采用的4 种运动模式(不在训练集内)。 仿真采用的目标的轨迹起点为X1=[8 000 50 0 8 000 20 0]T,基本单位为m,轨迹长度为200 s,采样率T=1 s,轨迹机动情况如表2所示。表2中,“—”表示其数值不用具体说明,则目标真实轨迹如图1所示。

表2 目标机动情况Tab.2 Target maneuver
仿真中,假设x 轴和y 轴高斯白噪声独立,且方差相同。滤波器采用卡尔曼滤波器。为了进一步提高轨迹识别率,在量测进行2.2节提到的平均处理前,进行简单的平滑处理。滑窗长度为10个采样点,每次也往前滑动10个采样点。考虑到BP神经网络的训练白噪声方差最高设置为40 m2,因而将算法性能分析时方差下限设置为0,上限设置为80 m2,步长为5。采用蒙特卡洛实验方法,每种白噪声方差下仿真200 次。采用目标跟踪的平均RMSE,即ARMSE 作为衡量跟踪效果的指标,具体定义如下[20]:
仿真得到的结果如图2所示。

图2 ARMSE随噪声变化图Fig.2 ARMSE with noise variation diagram
根据图2、3的显示的结果,可以发现,在训练样本采用高斯白噪声方差上限为40 m2及2.2 节提到的神经网络类别和参数设置的背景下,ANN-MM算法在噪声方差为55 m2(不同轨迹条件下该值有小范围波动)之前其ARMSE 平稳上升,说明在此时算法处于较稳定的状态;方差大于55 m2时,ARMSE 的上升斜率增加,说明算法开始逐渐趋于不稳定。因此,在后续的同传统算法的性能对比分析中应该设置方差在55 m2以下,使得结果可信度较高。
3.2 ANN-MM算法与IMM算法比较分析
为了研究分析ANN-MM算法相较于传统算法的优势和不足,须将算法的跟踪效果与传统算法进行对比。本文中采用ANN-IMM算法与IMM算法相对比,原因在于它们同为多模型跟踪算法,更有可比性。

根据图3~5,结合表2 对目标真实轨迹的描述,可以看出:
1)ANN-IMM算法比起其他2种算法在目标匀速运动阶段跟踪能力相差不大。
2)在40~120 s 的轨迹段,目标正处于协同转弯阶段。在此阶段,ANN-MM算法的跟踪误差远低于其他2个算法,并达到了算法精度最高段,说明该算法在本文参数设置下适合跟踪协同转弯较多的目标。
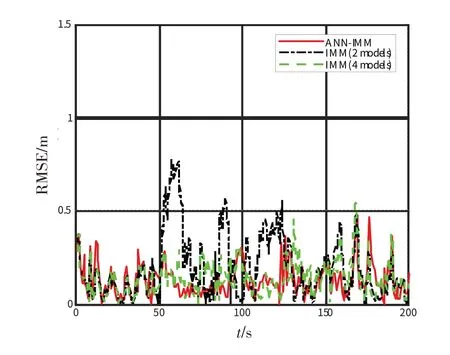
图3 ANN-MM与IMM x 轴跟踪RMSE比较图Fig.3 Comparison of ANN-MM and IMM x-axis tracking RMSE

图4 ANN-MM与IMM y 轴跟踪RMSE比较图Fig.4 Comparison of ANN-MM and IMM y-axis tracking RMSE
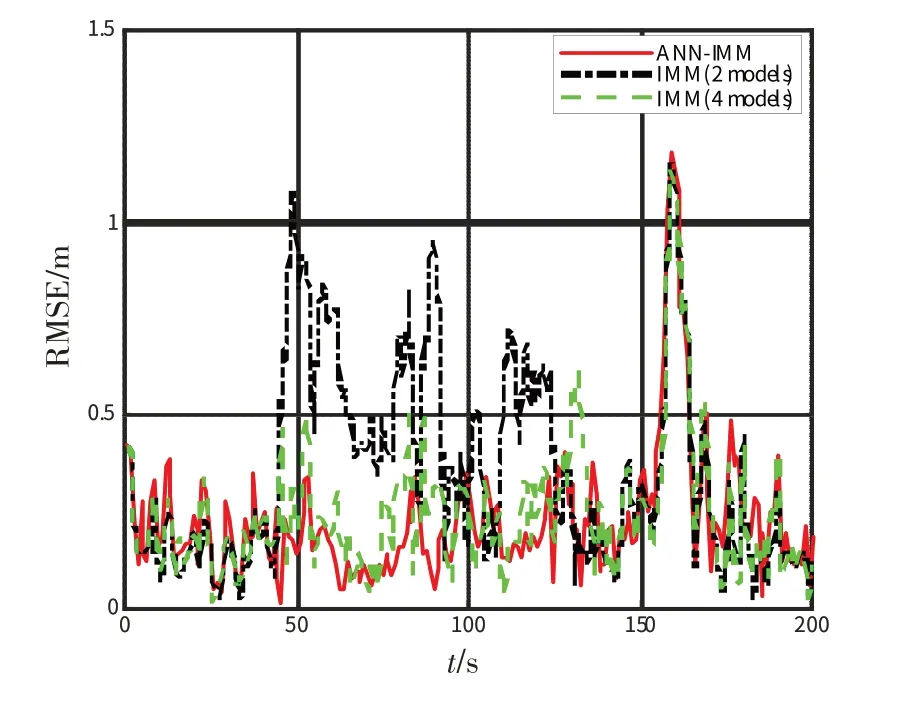
图5 ANN-MM与IMM跟踪位置RMSE比较图Fig.5 Comparison of ANN-MM and IMM tracking RMSE of position
根据图3~5,结合表2 对目标真实轨迹的描述,可以看出:
1)ANN-IMM算法比起其他2种算法在目标匀速运动阶段跟踪能力相差不大。
2)在40~120 s 的轨迹段,目标正处于协同转弯阶段。在此阶段,ANN-MM算法的跟踪误差远低于其他两个算法,并达到了算法精度最高段,说明该算法在本文参数设置下适合跟踪协同转弯较多的目标。
3)在130~170 s 的轨迹段,目标正处于匀加速运动阶段。在此阶段可以看到,ANN-MM算法在目标进行机动改变时具有最大的峰值误差,而在目标匀速运动稳定后,其误差低于具有4 个模型的IMM 算法,高于具有2 个模型的IMM 算法。这是由于轨迹特征向量和运动模式划分规则对匀加速直线运动没有更加细致的描述和划分,导致匀加速阶段模型描述比较笼统造成的。
4)对于2 个具有不同模型的IMM 算法,虽然4 个模型的IMM算法通过增加CT模型使得目标在协同转弯运动时降低了跟踪误差,但却由于不匹配模型拉低匹配模型的精度和模型切换时间,使4个模型的IMM算法在跟踪匀加速阶段时,误差显著增加;同时,在跟踪协同转弯时,由于模型增加,虽然80~120 s 阶段4个模型的IMM 算法的跟踪精度逐渐接近ANN-MM 算法,但它的模型切换时间大幅增加,导致40~80 s 阶段2个IMM算法误差几乎一致。
综上,ANN-IMM 算法具有比IMM 更强的灵活性,由于其同一时刻只有一个模型运行的机制,因而增加模型不会像IMM 一样直接影响模型切换时间和拉低匹配模型的精度。同时,ANN-MM算法可以通过增加模型、训练更多样本和使用更加高效的智能算法提高适用范围和跟踪精度,具有更强的发展性。
由于采用了滑窗取目标轨迹段进而估计目标该段时间里的运动模式,因而必然会跟踪滞后。滞后的时间跟采样点间隔、滑窗长度和滑窗滑动的长度有关。但是在跟踪舰船、汽车等低速目标时,滞后的时间对跟踪影响较小,且可以通过提高采样频率减少滞后时间。
另外,本文的轨迹特征提取思路拓展到三维空间以及极坐标下的目标跟踪时完全没有问题的,拓展性和应用性都较之传统算法都更高。
4 结论
本文研究了基于人工神经网络的多模型目标跟踪算法。首先,根据几种基本目标运动模式下的目标运动轨迹特点设计了轨迹特征向量的提取方法和模型间的参数继承规则;然后,根据特征向量设计了BP神经网络训练数据的生成方式、网络结构和参数;最后,通过仿真分析ANN-MM 算法跟踪性能随量测噪声方差的变化趋势,与2种具有不同模型数目的IMM算法进行跟踪性能的比较分析,结果表明,该算法具有更强的灵活性和拓展性。同时,在本文环境下,适合跟踪舰船等运动模式复合程度低的目标。但该算法也存在缺点,比如对匀加速运动模式跟踪效果稍弱,这将是下一步研究工作的方向之一。
