变论域模糊PID控制在数字随动实验系统中的应用
2019-10-08陆伟敏
高 岩,唐 路,陆伟敏
变论域模糊PID控制在数字随动实验系统中的应用
高 岩,唐 路,陆伟敏
(北京理工大学 自动化学院,北京 100081)
该文提出了一种变论域模糊自适应PID控制方法,利用变论域思想,设计了一种基于模糊规则的伸缩因子控制器,动态地调整模糊控制器的量化因子和比例因子。利用MATLAB的RTW/RTWT功能在实验室的数字随动系统上分别对PID控制、模糊PID控制、变论域模糊PID控制三种方法进行了实验对比,结果表明变论域模糊PID控制方法超调量小,调节时间短,具有更好的动态响应性能和自适应能力。
数字随动;变论域;伸缩因子;模糊PID
数字随动系统在工业和军事上都有着一定的应用,它是一类典型的非线性、时变系统,难以建立精确的数学模型[1]。目前数字随动系统大多采用传统的PID控制,虽然传统PID控制算法结构简单、鲁棒性强,但对于难以精确建模的对象控制效果不甚理想[2]。
模糊控制由于对被控对象数学模型的依赖性小,近些年来受到广泛关注,有着越来越多的应用。但是单纯的模糊控制由于缺乏积分环节,稳态误差无法消除。专家学者将模糊控制与PID控制结合起来,提出了多种解决方案。典型的有模糊–积分控制、模糊–PID复合控制和模糊自适应PID控制等[3-4],其中模糊自适应PID控制因其对系统动态性和稳定性的良好改善应用最为广泛。
常规模糊自适应PID控制的原理是:系统误差和误差变化率输入模糊控制器,模糊控制器根据预先设定好的规则输出P、I、D 3个参数的调节量,以实现PID控制器参数的在线自整定[5]。这种控制方式的缺点是输入输出变量的模糊论域在控制过程中不发生变化,当系统误差变小时,对应的模糊规则变少,造成控制精度不高。而增加模糊规则数量则会加大对专家经验的依赖,同时过多的模糊规则也会影响到控制系统的实时性。
针对以上问题,本文结合变论域的思想,设计了一种变论域的模糊自适应PID控制器,根据系统运行过程中偏差和偏差变化率的大小实时调整输入输出变量的论域,使得整个过程中都有足够的模糊规则可利用,最后利用MATLAB的RTW/RTWT硬件实时仿真功能[6]在本实验室的数字随动系统上进行了实验。
1 变论域模糊控制
(1)变论域思想。李洪兴教授在文献[7]中首次提出了变论域的思想,该思想的实质是:模糊规则在形式上不发生变化,通过在论域前添加伸缩因子的方式使得论域随误差的变化而变化。当误差变小时,论域收缩,相当于增加了模糊规则,间接提高了控制精度。
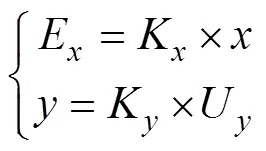
(2)论域伸缩。假设输入量为误差,其初始论域为[–E,E],均匀划分7个模糊子集{NB,NM,NS,ZE,PS,PM,PB},如图1所示。

图1 初始论域


图2 论域的伸缩
记输入变量的初始模糊论域为,输出变量的初始模糊论域为,则控制过程中输入输出量的论域可表示为:
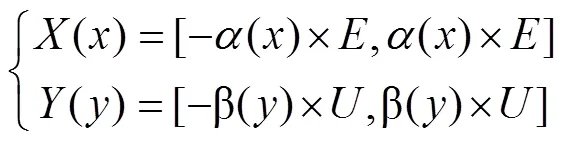
模糊控制器的模糊量与物理量关系如下:
2 变论域模糊PID控制器的设计
变论域模糊PID控制器的结构如图3所示。伸缩因子模糊控制器根据输入变量(误差)和ec(误差变化率)的大小输出伸缩因子和,伸缩因子通过调节和ec的量化因子以及DK、DK、DK的比例因子实现PID参数模糊控制器的变论域作用。

图3 变论域模糊PID控制器结构
2.1 模糊PID控制器

图4 e、ec隶属度函数
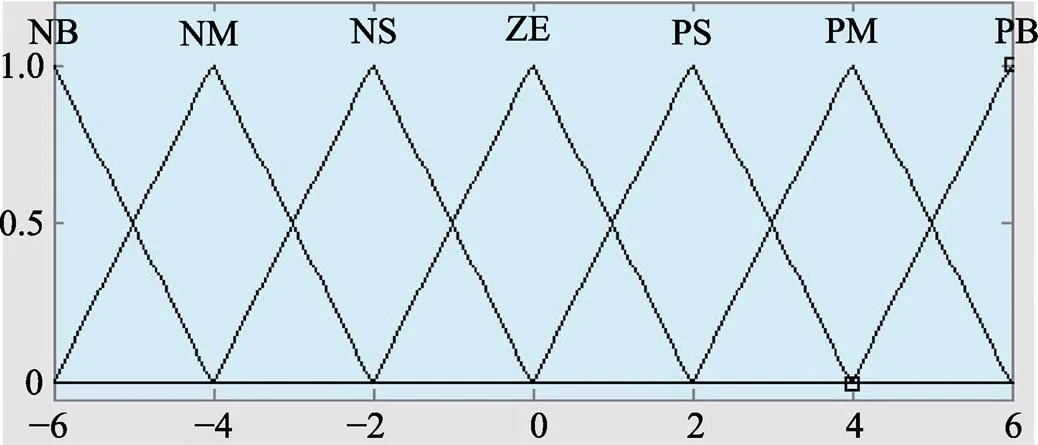
图5 DKP、DKi、DKd隶属度函数
参照上文的整定原则,建立如下模糊控制规则表(见表1、表2、表3)。
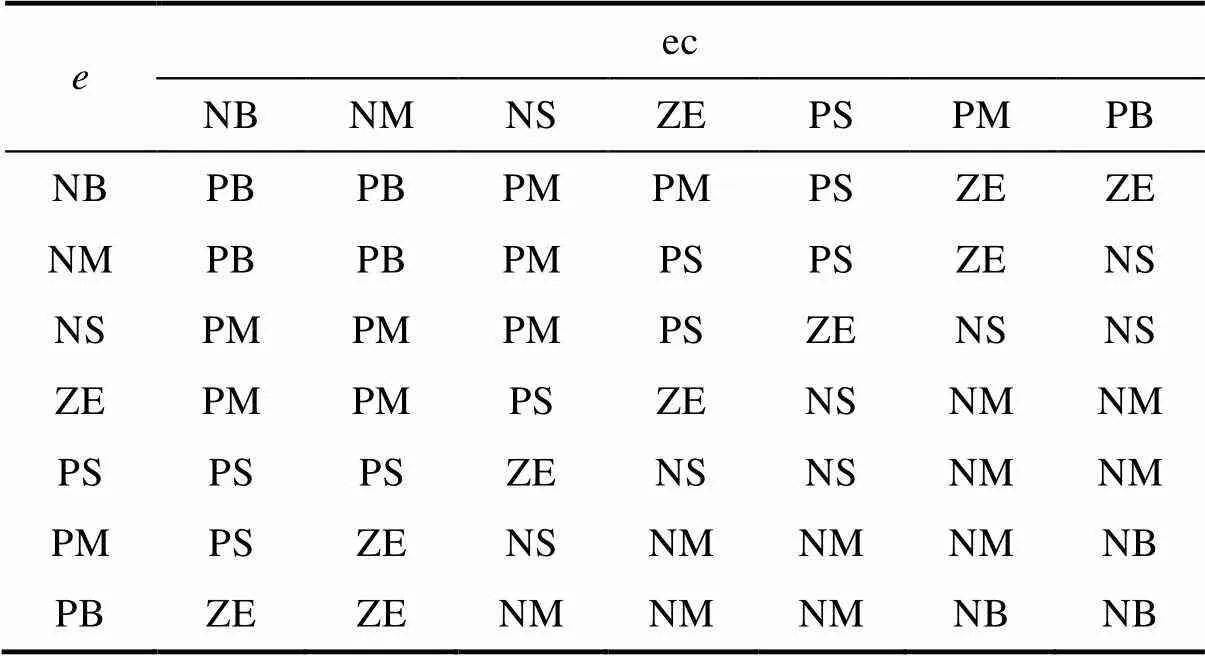
表1 DKP的模糊控制规则表
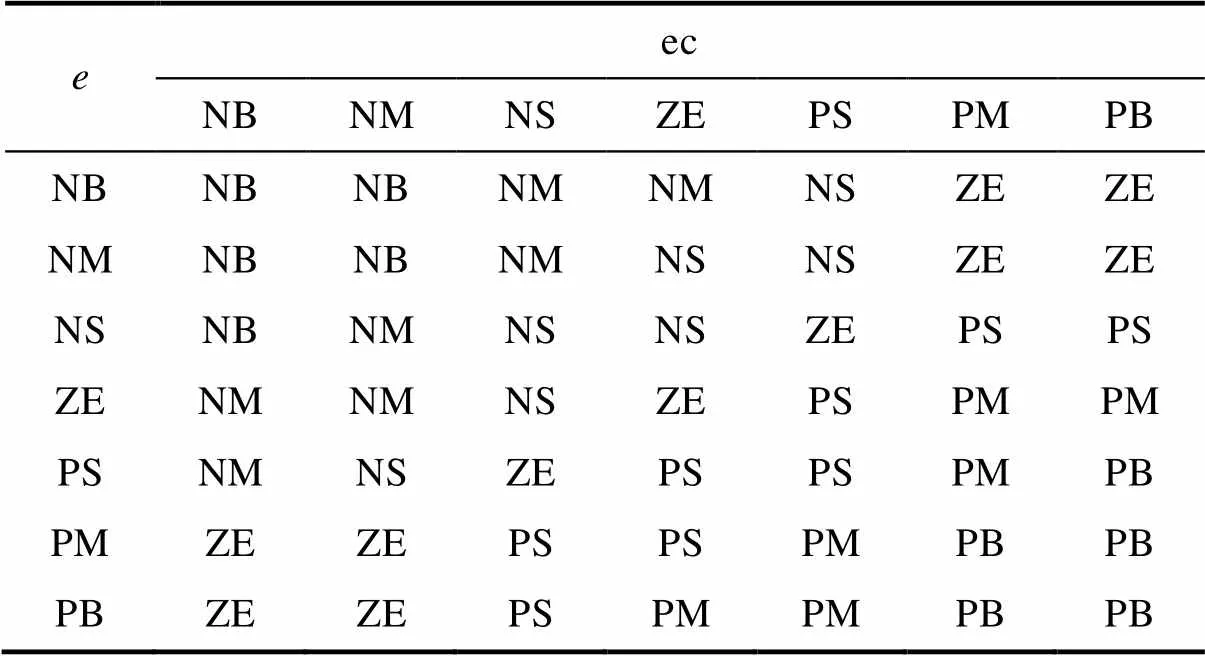
表2 DKi的模糊控制规则表
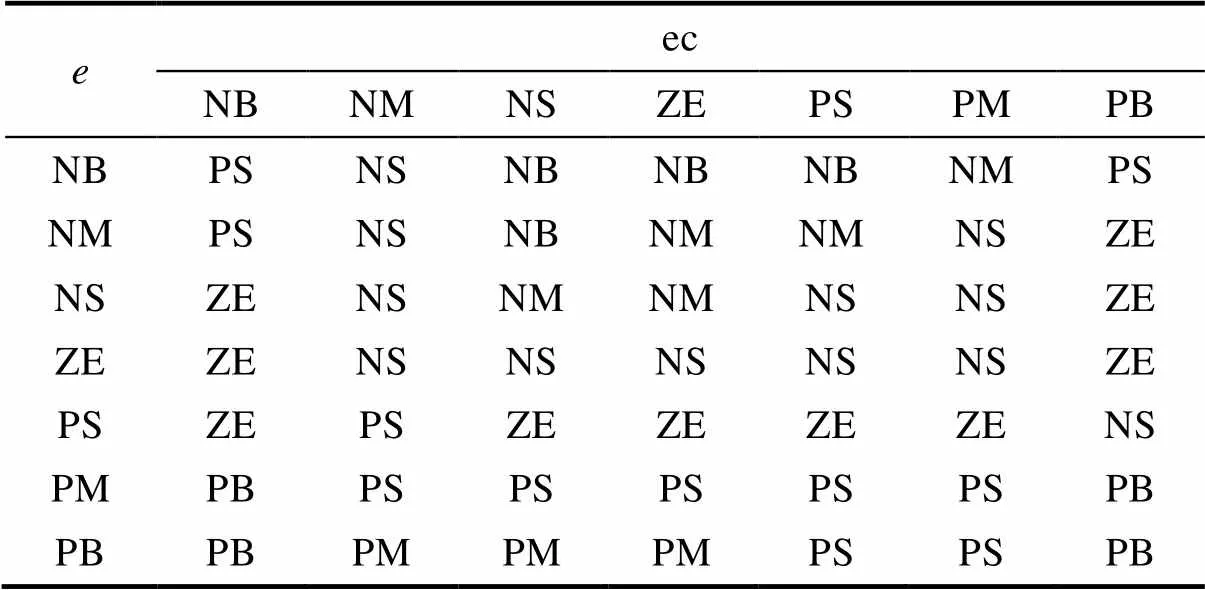
表3 DKd的模糊控制规则表
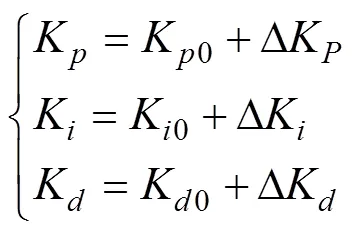
整定后PID参数如式(3)所示。
2.2 变论域的实现

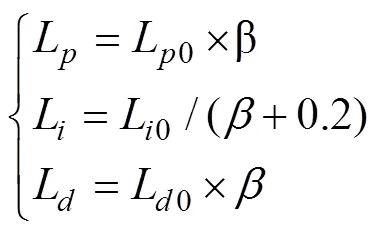
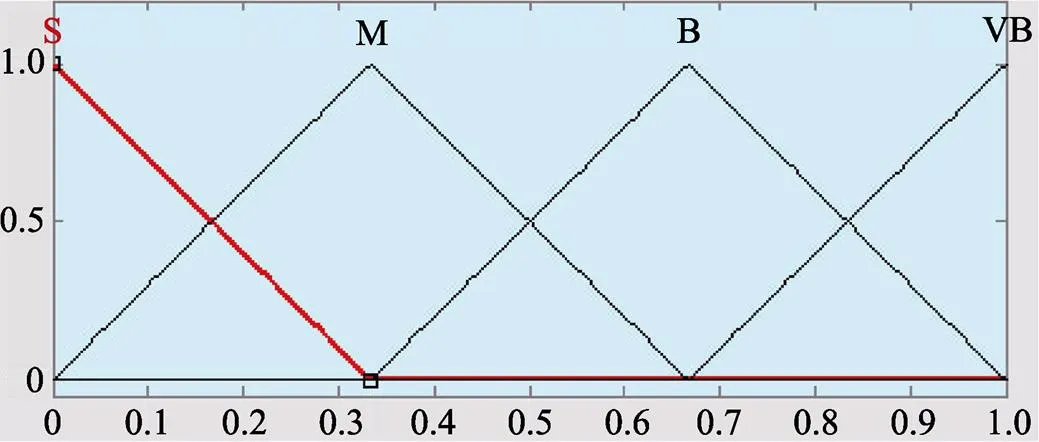
图6 a的隶属度函数
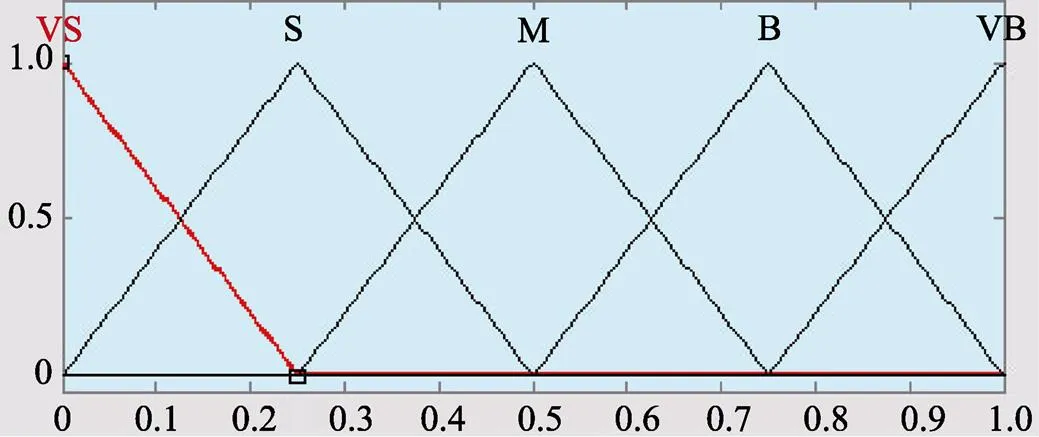
图7 b的隶属度函数

表4 a的模糊控制规则表

表5 b的模糊控制规则表
3 实验结果与分析
3.1 硬件实验平台
本实验室的数字随动实验系统的结构如图8所示。计算机给定跟踪目标角度,与光电码盘反馈相减,得到误差量。误差量送入控制器,控制器输出量经过一系列的信号转换后驱动电机旋转,从而使得刻度盘角度向目标位置接近并最终停在目标位置[10]。

图8 数字随动实验系统结构
3.2 驱动程序编写
本文利用MATLAB的RTW/RTWT工具箱建立半实物仿真平台,由于MATLAB中没有AMPCI-9110数据采集卡的驱动支持程序,因此需要通过Simulink的C-MEX S函数模块进行驱动程序的开发。
数字随动系统需要读取光电编码器的位置反馈信息,该信息是1个9位二进制码数字量,因此需要编写数字量输入(DI)驱动模块:需要输出1个控制电压,因此需要编写模拟量输出(D/A)驱动模块。下面介绍使用S函数模板编写DI驱动模块的过程:
(1)定义S函数源文件名称,该名称是外部程序调用S函数的接口。定义S函数级别为2,使得可以利用S函数的全部特性。
(2)在初始化函数mdlInitializeSizes中设置外部输入参数为1,用来输入板卡基地址。
(3)在mdlInitializeSizes函数中设置输入、输出端口数目和宽度,并设置模块的连续、离散状态数。由于DI的输入来自光电码盘的反馈,所以无需输入端口,输出端口数目设置为1。设置采样时间个数为1,说明各端口采用相同的采样时间。
(4)在mdlInitializeSampleTimes函数中初始化采样时间为系统采样时间,偏移量为0。
(5)参考板卡寄存器编程手册,在mdlOutputs函数中按照正确的时序对寄存器进行读写操作,实现DI数据量输入功能,该函数用到从外部输入的板卡基地址。
(6)在Matlab命令窗口键入mexpci_di.c,将该 C程序编译为MEX文件,该文件可被Simulink直接调用。
D/A驱动程序的编写步骤与DI程序类似,最后在mdlTerminate函数中将设备的模拟量输出设置为零,以使得程序停止运行时系统也随之停止。
3.3 算法研究

3种控制算法各项参数对比如表6所示。
结合图9和表6可知,VFPID比PID和FPID的控制效果更好,超调更小,调节时间更短,这表明变论域模糊PID控制能显著提升系统的动态性能。3种控制算法的稳态误差均为0,这是由于引入了积分作用,消除了系统误差。
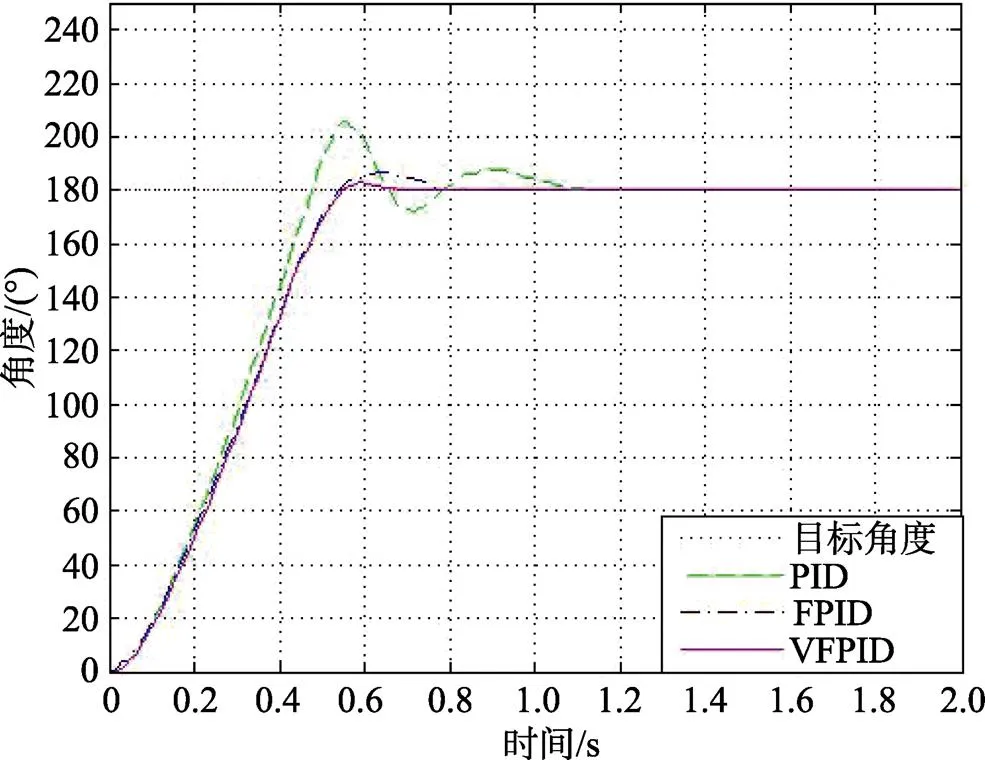
图9 控制算法跟踪曲线

表6 控制算法性能指标
4 结语
针对本实验室的数字随动控制系统,本文提出了一种变论域模糊自适应PID控制方法。该方法使用2个模糊控制器,模糊控制器一用于调整模糊控制器二输入变量的量化因子和输出变量的比例因子,然后利用模糊控制器二输出的PID参数调整量对PID参数进行在线实时调整,最后利用MATLAB的RTW/RTWT功能在本实验室的数字随动系统上进行算法验证。实验结果表明,变论域模糊自适应PID比常规PID和模
糊PID超调量更小,调节时间更短,具有更好的动态响应能力和自适应能力。
[1] 赵文龙,王波,程若发,等.基于数字随动系统的PWM装置数学模型分析[J].电力电子技术,2012, 46(4): 65–68.
[2] 高淑芝,高宪文,朱志承,等.基于变论域模糊PID的汽提塔温度控制方法[J].东北大学学报(自然科学版),2010, 31(10): 1369–1372.
[3] 席爱民.模糊控制技术[M].西安:西安电子科技大学出版社,2008.
[4] 刘金琨.先进PID控制MATLAB仿真[M]. 3版.北京:电子工业出版社,2011.
[5] 蒋妍妍,李洪林.基于变论域模糊PID的分解炉温度控制研究[J].测控技术,2014, 33(10): 72–75.
[6] 耿东光,孙志毅,柏艳红,等. RTWT环境下PCI-16MFP数据I/O接口技术的研究[J].工业控制计算机,2011, 24(5): 19–20, 22.
[7] 李洪兴.变论域自适应模糊控制器[J].中国科学,1999, 29(1): 32–36.
[8] CHEN Y, LEI J, YANG X. Variable Discourse of Universe Fuzzy- PID Temperature Control System for Vacuum Smelting Based on PLC[J]. Global Congress on Intelligent Systems, 2009(1): 541–544.
[9] GAO M, HE S. Self-Adapting Fuzzy-PID Control of Variable Universe in the Non-linear System[J]. International Conference on Intelligent Computation Technology and Automation, 2008(6): 473–478.
[10] 李刚,赵岩,徐立群,等.数字随动系统与火控计算机接口特性分析及修正[J].火炮发射与控制学报,2009(1): 39–42.
[11] 王晨丰.基于临界比例度法的PID控制器参数整定[J].数字技术与应用,2015(6): 14–15.
Application of variable universe fuzzy PID control in digital servo experiment system
GAO Yan, TANG Lu, LU Weimin
(Automation College, Beijing Institute of Technology, Beijing 100081, China)
A variable universe fuzzy adaptive PID control method is proposed in this paper. By using the idea of variable universe, a scaling factor controller based on fuzzy rules is designed to dynamically adjust the quantization factor and scale factor of the fuzzy controller. With the RTW/RTWT function of Matlab,experimental comparison is carried out among the three methods of PID control, fuzzy PID control and variable universe fuzzy PID control in the digital servo system of the laboratory. The results show that the variable universe fuzzy PID control method has smaller overshoot, shorter adjustment time, better dynamic response performance and adaptive ability.
digital servo; variable universe; flex-factor; fuzzy PID
G642.0
A
1002-4956(2019)07-0024-05
10.16791/j.cnki.sjg.2019.07.007
2018-12-20
高岩(1967—),男,黑龙江佳木斯,博士,副研究员,主要研究方向为模式识别与智能系统.E-mail: gaoy@bit.edu.cn
唐路(1996—),男,贵州安顺,硕士研究生,模式识别与智能系统.E-mail: 18810934026@163.com
