基于双目视觉的带圆特征工件空间定位研究
2019-09-27王西峰康运江张文昌
王 翰 ,王西峰,康运江,张文昌
WANG Han1 ,WANG Xi-feng2 ,KANG Yun-jiang1,ZHANG Wen-chang1
(1.机科发展科技股份有限公司,北京 100044;2.机械科学研究总院集团有限公司,北京 100044)
0 引言
双目立体视觉能够获得摄像机视场范围内的三维位置信息在工业生产中应用广泛,如工件定位、三维测量、表面重构[1~3]等。工件中通常带有圆孔、柱状体等圆特征,由于圆形在空间中各个方向没有明显区别,难以获得定位特征点,因此常用的特征定位方法难以对简单、无纹理的带圆特征工件定位[4]。
本文在双目视觉系统基础上,对带圆特征工件定位方法进行研究,通过几何关系结合三维重构结果,解决空间圆定位的二义性问题,获得工件准确空间位姿。
1 虚拟椭圆投影模型
空间中圆面在摄像机成像面上的投影一般是椭圆,当空间圆面于摄像机相交且法向量与光轴垂直时,投影为一个线段,当法向量与摄像机光轴重合时,投影为一个正圆,本文讨论一般的的情况。如图1(a)所示,在空间中的圆O1在摄像机成像面中的投影为e1,通过对采集到的图像进行椭圆拟合,可以获得图像中投影椭圆的长轴、短轴长度Llradius、Lsradius和投影椭圆的圆心坐标eO,以及长轴相对于摄像机X轴的旋转角度,根据拟合数据可以计算长短轴端点m、n、p、q的坐标,假设在实际圆中的对应点为M、N、P、Q。
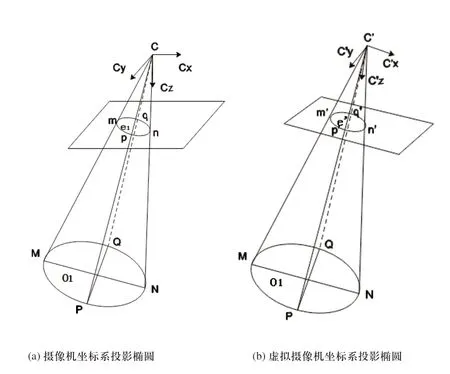
图1 投影椭圆
为了便于解决定位问题,将摄像机坐标系绕摄像机光心C旋转,摄像机光轴交于投影中心点,轴交于摄像机长轴,可构成虚拟投影椭圆e',如图1(b)所示。
根据文献[5]可知,在原始摄像机坐标系中投影到长短轴的点M、N、P、Q,在虚拟摄像机坐标系中的投影位置仍为虚拟投影椭圆的长短轴端点m',n',p',q'。在虚拟坐标系中的投影椭圆如图2所示。

图2 虚拟摄像机坐标系中的投影椭圆
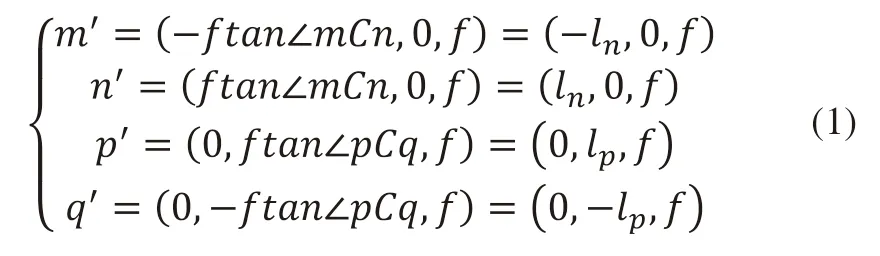
在原摄像机坐标系中m、n、p、q各点的像素坐标已知,根据标定数据可以计算实际坐标位置mr、nr、pr、qr,根据空间椭圆的几何关系∠mCn=∠MCN,∠pCq=∠PCQ,旋转前后M、N、P、Q位置不变,则∠mCn=∠m'C'n',∠pCq=∠p'C'q'。可根据∠mCn和∠pCq的值和摄像机焦距计算m、n、p、q各点在虚拟摄像机坐标系对应点m',n',p',q'的实际位置为:
从而可以计算从原始坐标系到虚拟坐标系的旋转矩阵Rotr-virtual,为:

2 圆面姿态计算
以虚拟摄像机光心C'顶点,以虚拟投影椭圆为底面,可构成底面为椭圆的椭圆锥。由于此椭圆锥是通过空间圆在平面上的投影椭圆构成,因此使用平面对椭圆锥截得的二次曲线中必然存在正圆,通过获得截得正圆的平面即可获得圆相对于虚拟摄像机坐标系的姿态。
在虚拟摄像机坐标系中,椭圆锥可表示为:

假设任意平面方程为Ax+By+Cz+D=0,在椭圆锥中截得的曲线方程为:
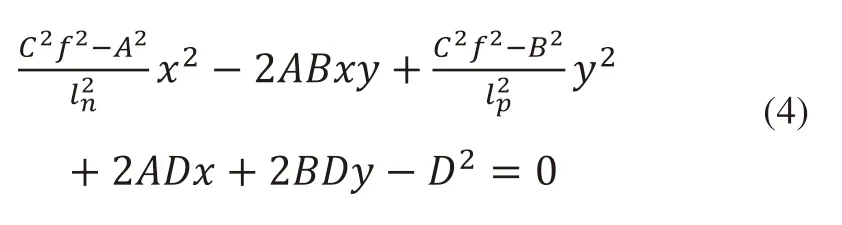
根据二次曲线为圆条件,当平面满足A=0,B≠0,C≠0时,截得的曲线为圆。可知截平面的法向量为n1=(0,B,C),长轴方向向量为nl=(1,0,0),因此可知空间圆O1与椭圆e'长轴平行,即绕椭圆e'长轴旋转,即可获得得到圆面,即虚拟投影椭圆长轴端点m'、n'与投影到这两个点的空间点M、N有m'n'//MN。截得的圆关于yC'z对称,由于椭圆锥与xC'z面对称,因此截得的圆关于xC/z面对称的曲线也为圆,平面在椭圆锥中可以截得与投影椭圆长轴平行的两个圆。
假设虚拟投影椭圆所在的平面为z=f,将平面绕长轴X轴旋转θ,在椭圆锥截得的二次曲线,根据文献[6],当截得的曲线为圆时,旋转角度θ为:
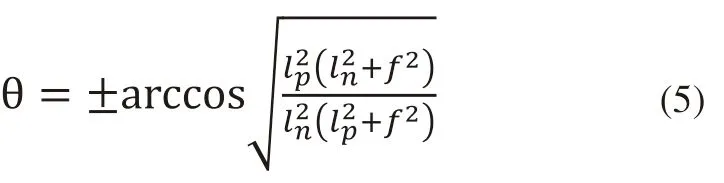
其中,θ为锐角。根据旋转角度即可计算投影成当前椭圆的圆面的方向向量为:

根据旋转矩阵Rotr-virtual的逆矩阵,即可计算空间圆在摄像机坐标系中的方向向量为:

3 圆面空间定位
上述计算过程中,会产生圆面的二义性问题,如图3所示,经过计算得到的是两个方向不同的圆。在单目视觉中二义性很难直接解决,本文通过双目视觉系统在双目视觉系统中完成定位,能够有效解决这一问题。

图3 空间中圆面位姿
双目视觉系统三维重构能够视场内的高度信息,即能够直接获得点P、Q在摄像机坐标系中的位置坐标(xp,yp,zp),(xq,yq,zq),空间中圆的圆心坐标
假设当Q点与摄像机的距离大于P时,zq>zp,对应在虚拟摄像机坐标系,空间圆方向向量在xC'y中的投影点在y轴的负半轴位置,即此时的方向向量为通过这种方式,解决二义性问题,获得空间圆的方向向量,得到圆特征工件相对于摄像机坐标系的姿态。
4 实验验证
本文拍摄使用Balser公司acA2500-14gm工业摄像机搭建双目视觉系统,镜头焦距为15mm,极线距离为70mm,视觉系统与工件放置平面的距离为900mm,经计算双目视觉系统的视场范围为250mm×250mm,搭建的视觉实验系统如图4所示。实验中使用的工件如图5所示。
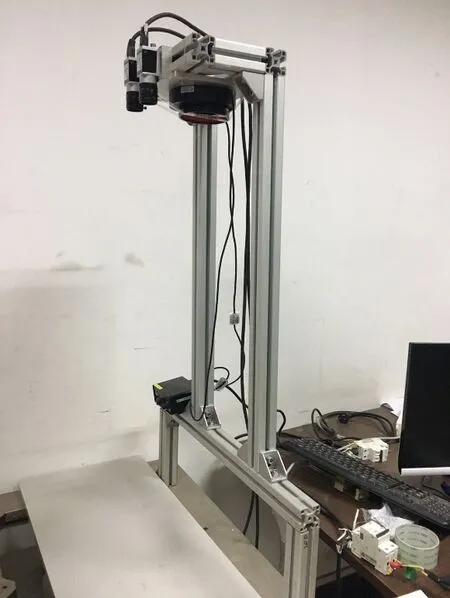
图4 双目视觉系统
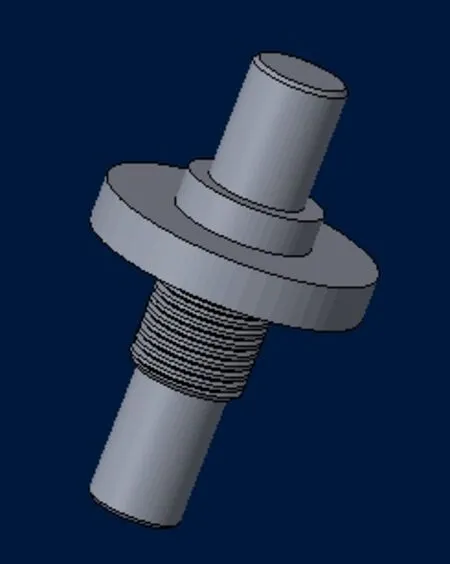
图5 定位实验工件
通过标定双目视觉系统获得左右摄像机参数为CamParL=[0.01517,-26.4215,2.20061e-06,2.2e-06,1315.49,970.90],CamParR=[0.01525,117.29,2.20018e-06,2.2e-06,1232.72,931.14],分别表示左右摄像机的焦距、畸变系数、单个像素点的长宽和图像中心点坐标。
本文将实验工件以固定姿态摆放在双目视觉系统视场内,摆放在视场内不同位置并采集数据,对工件进行定位实验,计算重复定位精度。并以平均值作为基准值,计算误差。实验结果如表1,表2所示。
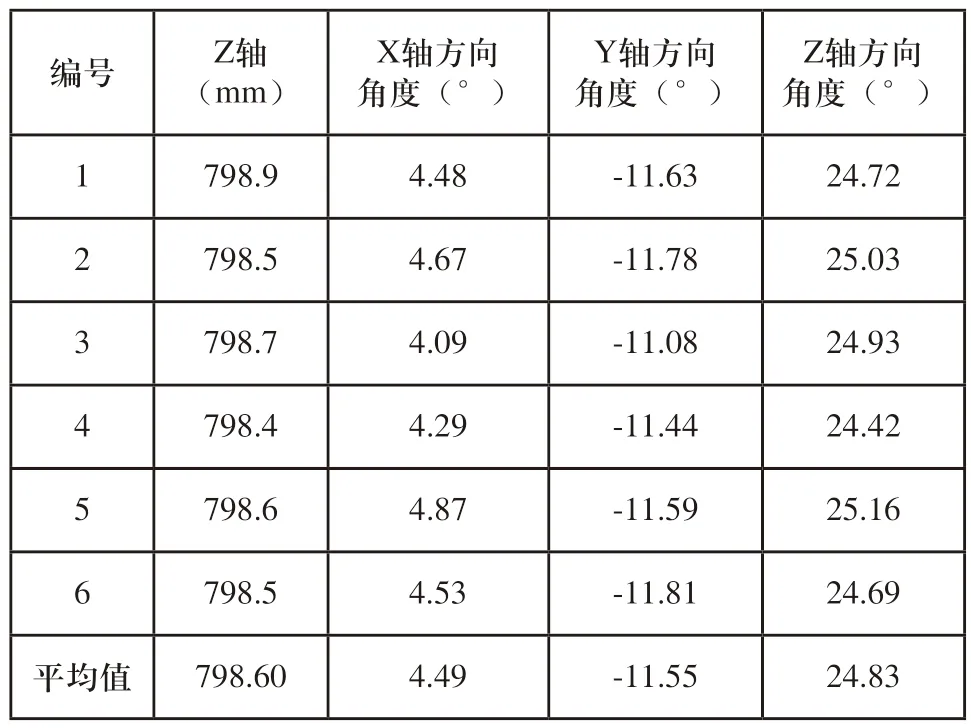
表1 定位算法定位位置坐标
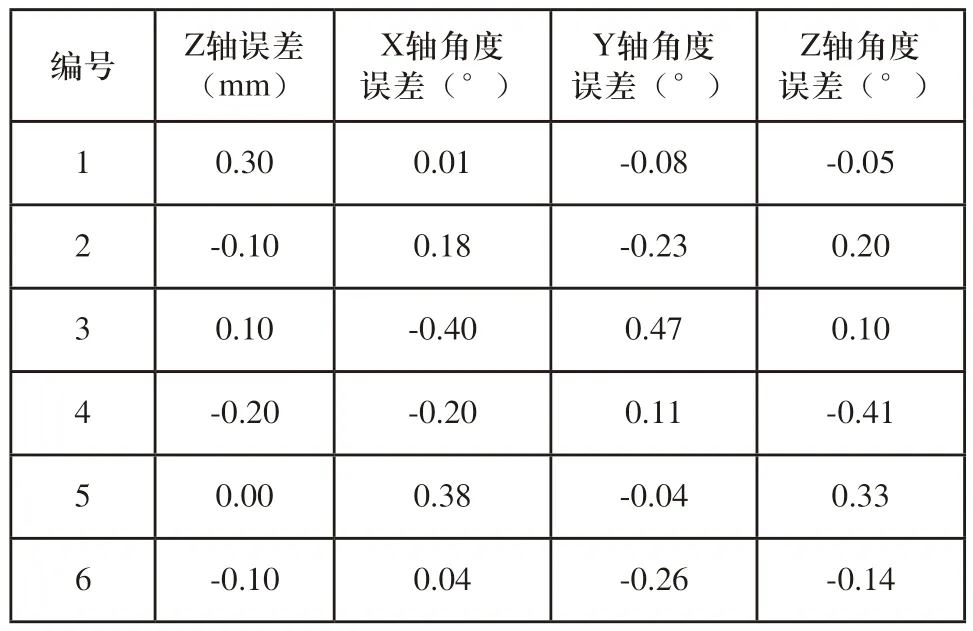
表2 位置误差
根据上述误差可知,本文定位算法在Z轴方向重复定位精度的误差≤0.3mm,姿态的重复定位精度误差≤0.05°。实验结果表明:本文使用算法对带圆工件的定位精度能够满足工业生产过程中工件定位的精度要求。
5 结论
本文针对带圆特征工件定位问题,基于双目视觉系统根据空间圆面与投影椭圆的几何关系,提出了一种对空间圆面的定位方法,并能够有效解决二义性问题,搭建试验台,通过实验验证了本文算法,实验结果表明:定位精度满足工业生产过程中工件定位的精度要求,原理清晰、计算过程简单,在实际应用中有着很大的意义。
