交流220 V同步方式通信电路的灯光控制系统
2019-09-26崔光杰李卓然金永镐
崔光杰,李卓然,金永镐
(延边大学工学院,吉林 延吉 133002)
引言
直流电的三线控制方式由于线路简单、成本低,广泛用于各种照明系统的控制场合[1,2],但交流系统中无法提供稳定的参考点[3],实际应用中通常使用电力线载波通信方式或无线通信方式进行控制,因此存在电路复杂、可靠性低、待机功耗较大、维护难等问题[4]。
为此,本文提出与交流电50 Hz同步方式工作的教室灯光控制系统,这种电路采用三线工作方式,分别为2根220 V交流电源线和一根公用信号线,主机和分机只通过一根公用信号线传送信号。
1 通信电路工作原理设计
交流220V同步方式工作的通信电路由一个主机和N个分机组成,可进行双向通信,主机呼叫分机后发送各种操作命令,分机响应后发送本机的状态。
1.1 主机和分机的参考点设计
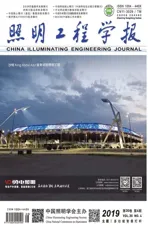
图1为主机和分机之间形成参考地的电路示意图。
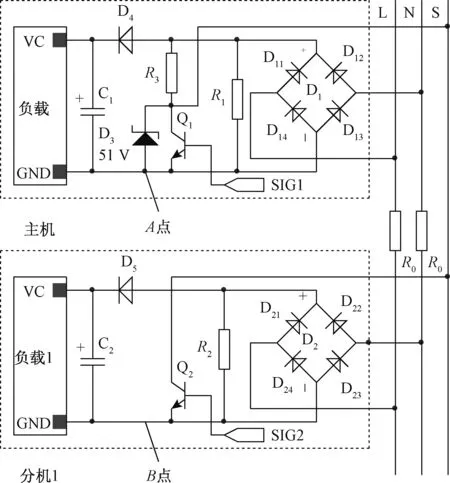
图1 参考地的形成电路
R0为线路的等效电阻,R1和R2保证交流电的整个周期中整流桥D1、D2始终处于微导通状态。当正半周时L线为正极性N线为负极性,整流桥D1的D11、D13导通,整流桥D2的D21、D23导通,A点经过D13、R0、D23连接到B点,当负半周时L线为负极性N线为正极性,整流桥D1的D12、D14导通,整流桥D2的D22、D24导通,A点经过D14、R0、D24连接到B点。
因此不管是正半周还是负半周A点与B点之间的电压UAB取决于式(1),式中i为线上的交流电流,UD为整流桥中每个二极管的正向压降。
UBA=|iR0+UD|-UD=|iR0|
(1)
可知整流桥D1、D2导通时压降互相抵消。由于每个集中控制区的线路电阻较小,电流分布也是离散方式,因此最远的2个装置之间的电压UBA可以控制在30 V以内。信号线上的脉冲信号与UBA和交流电中的其他尖脉冲干扰叠加在一起传送,因此为了便于检测脉冲信号,脉冲电压幅度应大于30 V,脉冲信号幅度越大抗干扰能力越强,但交流电的每个半周中传送信号的时间变短。
如果系统的工作电压范围设定在170~250 V,则传送信息的时间与信号电压幅值之间的关系如图2所示。可知当使用50 V左右的信号电压时,在170~250 V输入范围内,传送时间的变化不大,最大能使用的信号传送时间t约为8.6 ms。如果采用100 V的信号电压则能提高抗干扰能力,但发送时R3的功率损耗增加且t变小,约为7.2 ms。实验时采用约为50 V的电压传送信息,则可以准确地传送信息。
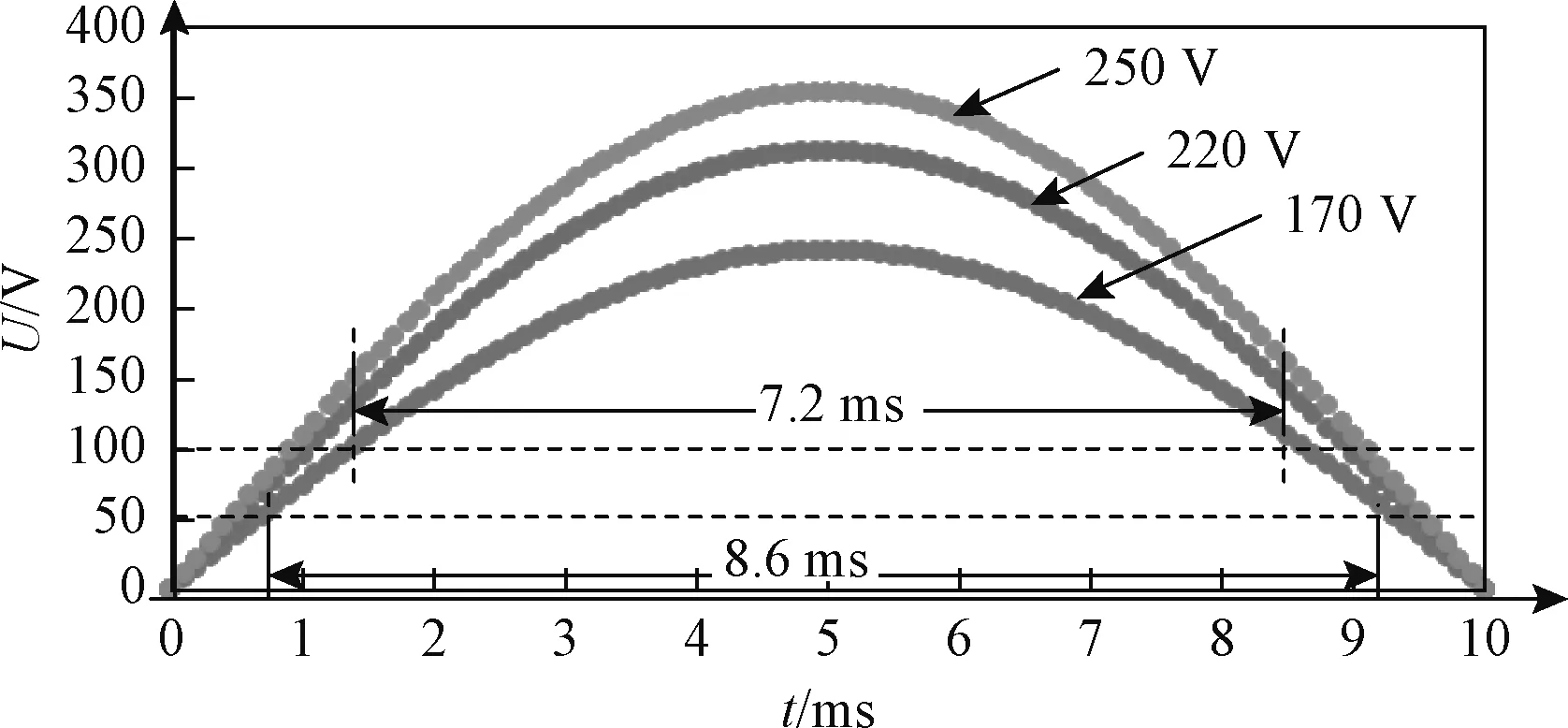
图2 传送时间与信号电压之间的关系
主机提供信号线上的电压必须与交流电的电压同步,否则分机发送信息时无法保证D1始终处于导通状态,系统无法工作。
因此在图1中,通信用电源取决于D1整流后经过R3、D3稳压后提供给信号线。同时整流桥D1、D2的输出端连接到电容负载时必须用二极管D4、D5隔离,以保证整流桥D1、D2始终处于导通状态。
1.2 通信格式的设计
图3为一帧通信格式示意图,由10位分机号、4位命令位、10位分机信息位,以及2个同步位,共30.5位组成。发送每位的时间为T,交流电限幅50 V后可得到约为8.6 ms的平坦区,如果T=240 μs则发送30.5位所需要的时间为7.32 ms,剩余的时间备用。图中阴影部分为1T的高电平。
图3 通信格式示意图
2 灯光控制系统设计
2.1 主机通信电路的设计
图4为主机电路,D4起隔离作用,隔离高压充电用电容C1和D3的输出端,防止C1电压影响D3的导通状态。
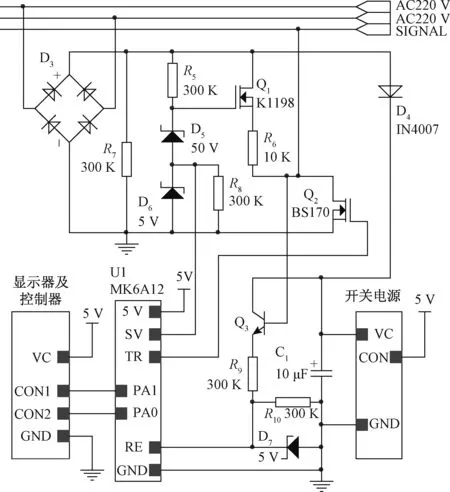
图4 主机电路
整流后的电压经过R5在D5、D6两端形成约为55 V的电压,经过Q1组成的射极跟随器后输出约为52 V的电压提供给R6、Q2组成的脉冲发生器,当Q2按照单片机U1的TR输出端信号进行开关时,在信号线上可以得到幅度为52 V的脉冲信号。
D6、R8的作用是检测大于55 V的输入电压状态提供同步信号,以便主机以同步方式呼叫分机。当输入电压幅值超过55 V时在D6两端产生约为5 V的电压,供U1的SV输入端,一旦检测到这个信号则U1开始进行开关控制Q2发送信息。
信号线的电压经过Q3、R9组成的射极跟随器后,在D7两端产生5 V的脉冲电压提供给U1的RE端进行分析处理。
2.2 分机通信电路的设计
图5为分机电路,由于分机数量较多且长期处于待机状态,为了减少待机功耗采用Q10、R22组成恒流源,不管输入电压怎样变化,提供恒定的电流使D15总是导通。通过多次实验测得当流经D15的电流大于20 μA时系统稳定工作,因此取30 μA的电流,电流值由式(2)决定。
(2)
这种恒流源当D15的输出电压低于3 V时恒流源不工作,但由于电压很小不影响系统正常工作。
图5中D13隔离电容C11和D15的输出端,防止C11电压影响D15的导通状态。发送时单片机控制Q11进行开关,接收时信号线上的电压经过Q9、R21组成的射极跟随器后,在D16两端产生5 V的脉冲电压提供给U3的RE端进行分析处理。
2.3 分机的低功耗电源设计
为了减少分机待机功耗,采用MK6A12低功耗单片机,并降低频率和工作电压运行使工作电流小于0.1 mA,并利用HV9910芯片建立的7.5 V工作电压,经过微功耗三端稳压器HT1033稳压后提供3.3 V给单片机,因此无需设计独立的工作电源。
MK7A23和MK6A12都是一种性能价格比很高的单片机,内含4 MHz的RC振荡器(通过外部电阻设定工作频率)、WDT(看门狗)及复位电路,工作电压为2.5~5 V,而且价格低廉,非常适合于各种工业使用的控制器[5,6]。HV9910芯片在6脚输出约7.5 V工作电压,最大的输出的电流为1 mA[7]。为了减少单片机的电流工作电压取3.3 V。
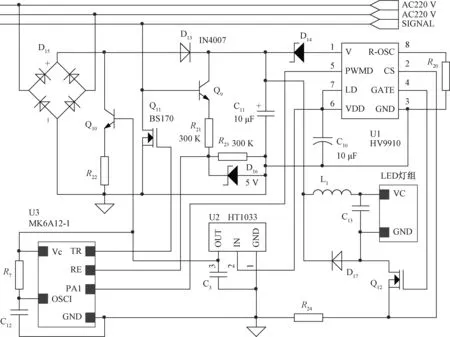
图5 分机电路
表1为MK6A12的工作电压为3.3 V,低电压复位电路开启,WDT关闭,定时器TM0工作时,实测的工作频率与电流及外接电阻R7之间的关系。当R7=100 kΩ时工作频率为1 MHz,工作电流为90 μA,远远小于1 mA(HV9910芯片6脚输出电流值)。
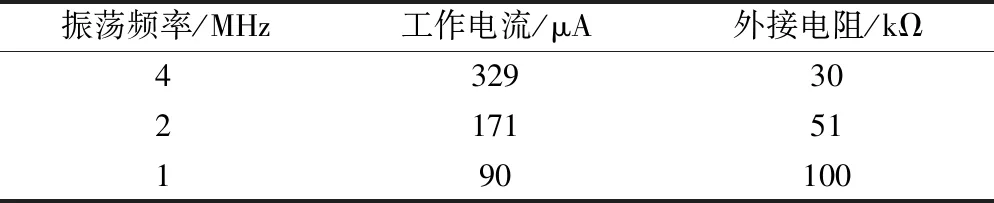
表1 频率与工作电流及外接电阻的关系
为了减轻U1的电压负担,整流后的电压经过D14(PK6E200A)降压200 V后提供给HV9910。通过这种设计实测的分机的待机功耗小于0.1 W。
2.4 分机的LED灯组驱动电路设计
图5中Q12、C13、D17、L1和HV9910组成40 W的LED灯组驱动电路,单片机通过PA1引脚控制PWMD引脚,当PA1高电平时,电路工作点亮LED灯组。根据主机的命令可进行全部点亮,或者选择方式点亮,如果对电路进行修改也可进行亮度调节。
2.5 通信电路的抗干扰能力分析
在图1中发送信息时以主机的A点为参考点,则信号线上的电压USA可用式(3)表示。当Q2饱和时USA=|UAB|而不是0 V,这是线路压降形成的干扰影响,线路压降越大影响越大。当Q2截止时USA=UD1=51 V,不受干扰。
USA=UQ2+|UAB|
(3)
图6为加入线路压降后发送信息时以主机的A点为参考点实测的信号线的波形。可见主机发送时不受干扰电压的影响,而分机发送时低电平受干扰电压的影响,因此主机的比较点设置在电压高的地方为宜。
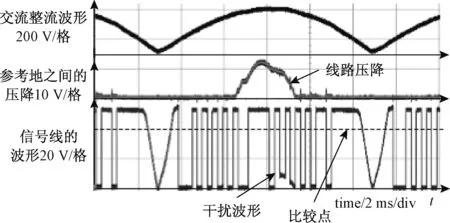
图6 主机的A点为参考点实测的波形
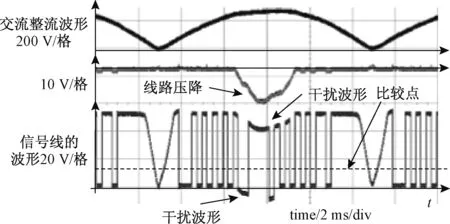
图7 分机的B点为参考点实测的波形
同样在图1中以分机的B点为参考点,则信号线上的电压USB可用式(4)表示。当Q1饱和时USB=-|UAB|,当Q1截止时UQ1=UD1=51 V,则USB=UD1-|UAB|,可见脉冲的高低电平都受干扰的影响。
USB=UQ1-|UAB|
(4)
图7为加入线路压降后发送信息时以分机的B点为参考点实测的信号线的波形。可见分机的B点为参考点时,脉冲的高低电平都受干扰的影响,因此分机的比较点设置在电压低的地方为宜。
为了便于检测在主机和分机中采用限幅5 V的方式,这样只要脉冲幅度大于5 V以上可检测出脉冲波形,考虑到交流电的其他脉冲干扰,如果脉冲幅度采用50 V,则大大提高抗干扰能力。
3 实验结果分析
图8是主机呼叫154H分机,而分机无应答时信号线的实测波形。10位分机号以D10~D1组成,则154H的排列为0101010 100B,从D10开始依次发送到D1。在t1点检测高电平后发送2.5T的低电平,t2点发送1T的高平后,t3~t16点开始发送主机呼叫信息以及4位命令信息,t17~t18点再次发送同步位;t19开始分机信息位,为了准确接收,在每位信息传送时间T的1/2处作为读入点进行检测。因此t19后延迟0.5T后在t20~t29点接收10位分机信息。
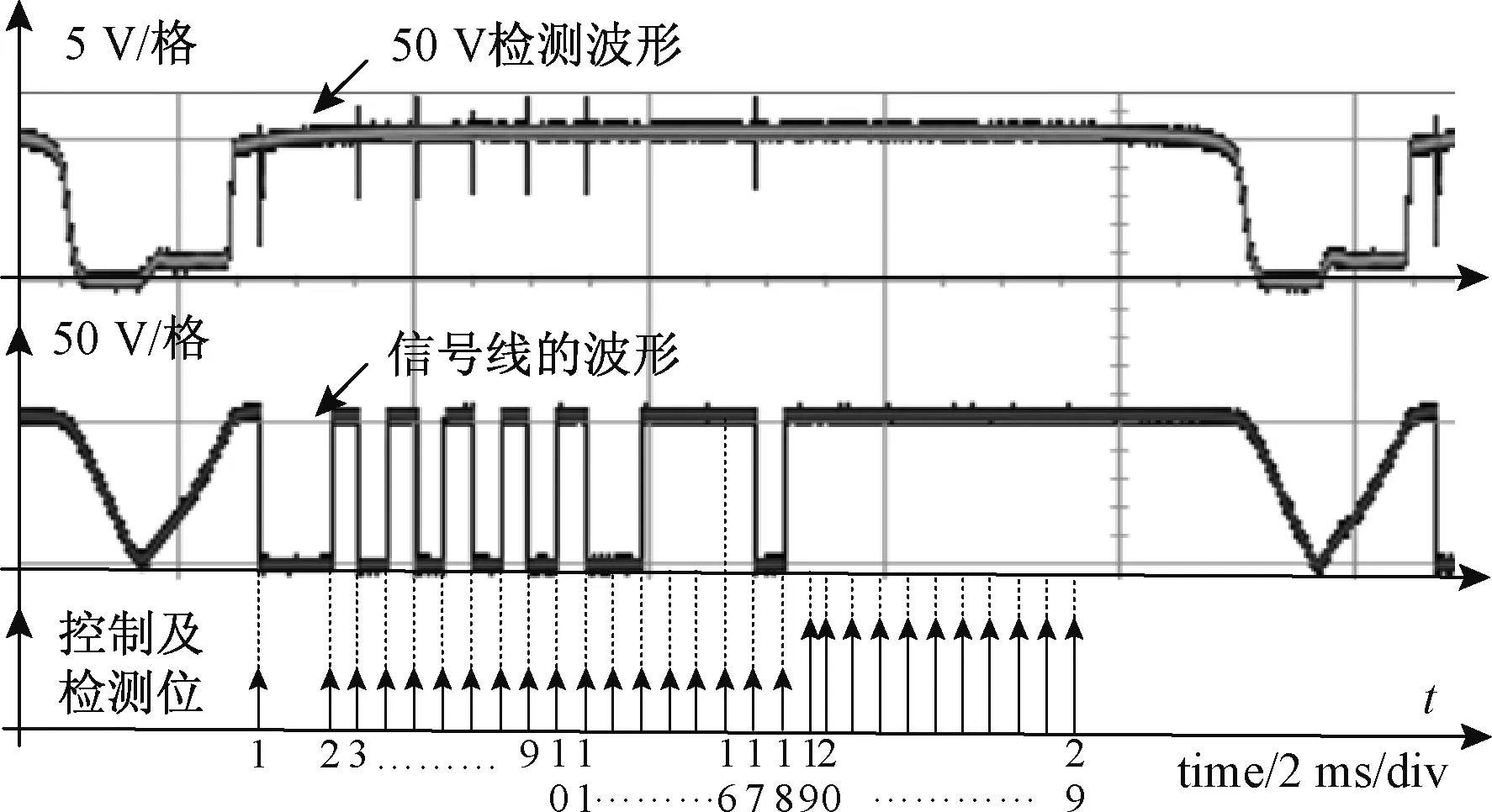
图8 主机呼叫分机,分机无应答时波形
图9为主机呼叫154H分机,分机应答156H时信号线上的波形。
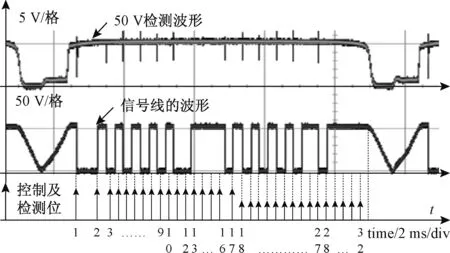
图9 主机呼叫分机,分机应答时波形
在t1点检测下降沿t2点开检测上升沿,判断是否是2.5T低电平后,延迟1.5T开始检测主机信息,在t3~t12点接收10位主机呼叫的154H分机号。当主机呼叫的分机号与本机号相同时,则在t13~t16点接收命令信息。在t17点检测到同步位的上升沿后,利用t18~t27点发送156H信息(0101010110B)。t28~t32可作为待开发信息位。
从实验结果看出,工作波形稳定,满足设计要求。
4 结论
本文设计的电路可进行双向通信,具有结构简单、工作稳定可靠、待机功耗小、容易扩展分机数量、可传送工作频率为1~50 kHz的脉冲的特点,根据主机的命令可进行全部点亮灯、选择方式点亮灯、调节灯光的亮度,也可以无需改变电路实现多地的控制,具有较好的应用价值。