基于载波通信的智慧路灯精准控制
2019-09-26程为彬王晓凡杨金晨
申 丹,程为彬,王晓凡,杨金晨
(陕西省油气井测控技术重点实验室,陕西 西安 710065)
引言
智慧照明是智慧城市建设的一部分。传统的路灯只能实现对某条街道单一的开关控制[1],而智慧路灯则是对路灯公共照明实行统一管理,每个路灯能够自行侦测毁损,并实时传送信号给控制中心以便维修,最终达到照明远程监控、智能管控、节能降耗“三位一体”的成效[2-4]。
考虑到我国路灯控制系统的现状以及对节能减排、智慧照明的迫切需求,我们搭建了一个智慧路灯的远程通信与控制系统,并进行了实验验证。该系统在基于GPRS为一级网络,低压电力载波通信(PLC)为二级网络的基础上[5],给每一个路灯终端定义唯一的地址,实现上位机对所有路灯的精准控制,最终达到对城市照明网络化、实时化、精确化和动态化的控制。图1所示为二级网络的系统结构图,其中能够直接和监控中心进行通信的终端称为集中控制主终端,其他为子终端。
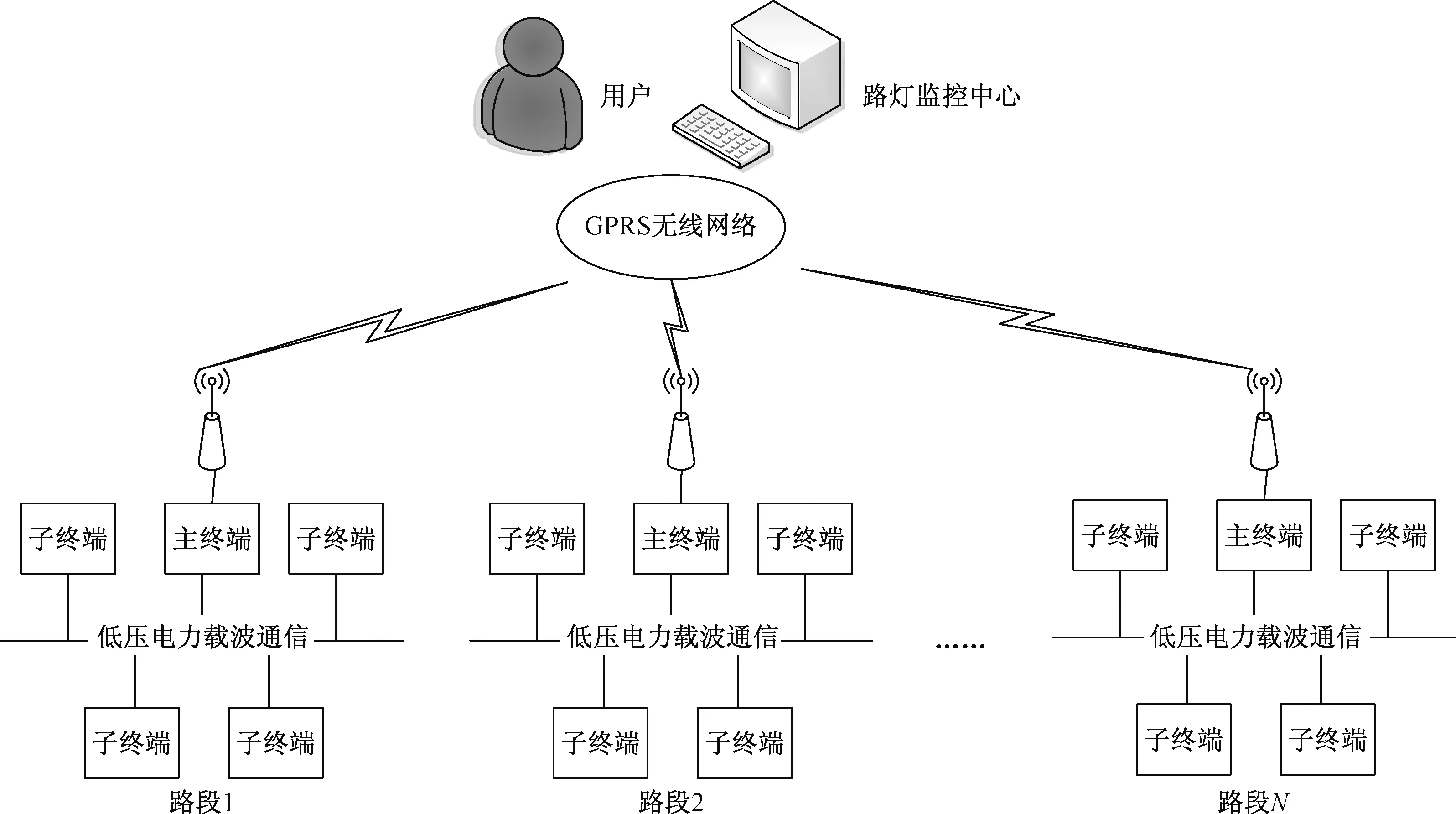
图1 路灯组网系统结构图
1 系统总体框架
智慧路灯控制系统主要由控制中心、若干路段集中控制主终端和若干路灯子终端组成[6]。控制中心即上位机对整个路灯组网系统的运行集中管理,包括远程实时控制、系统运行信息的采集和反馈。集中控制主终端负责所辖路段的通信和调光控制,路灯子终端负责单个路灯的控制和状态检测。任意一个路灯子终端可外接GPRS-DTU模块升级成集中控制主终端,多个路段及其GPRS构成分布式路灯远程控制系统,图2所示为智慧路灯控制系统的组网模型。
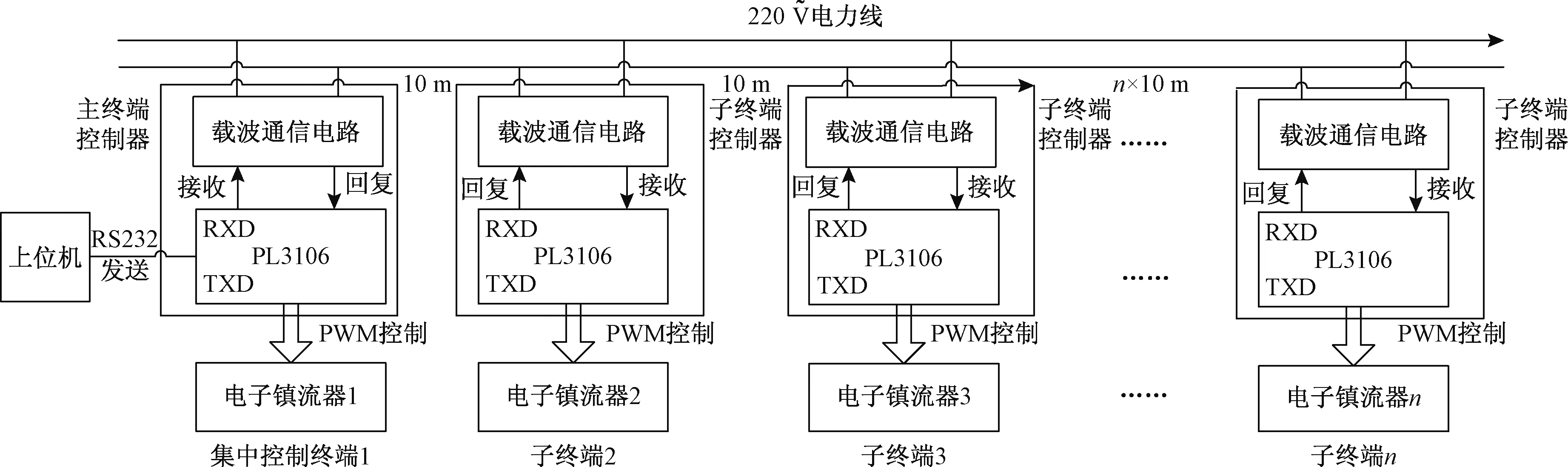
图2 智慧路灯控制系统组网
2 系统通信机制
系统的通信方式采用无线GPRS网络与低压电力载波通信(PLC)相结合。上位机与集中控制终端之间采用GPRS进行数据传输[7],集中控制终端与子终端之间采用电力载波通信方式进行数据传输。这种通信方式的好处是不需要重新架设网络,建设周期短且成本低,是智慧路灯通信系统的首选[8]。
2.1 Modbus通信协议
Modbus是一种总线型单主站、主从式的串行数据传输协议,上位机可完全控制和管理通信进程,既能单独和从设备通信,也可以广播方式和所有从设备通信。通信开始时主站首先向从站发送包含从站地址和通信要求的命令帧,从站接收到该命令帧并通过CRC校验后,先将命令帧中包含的从站地址号与本站地址相比较,如果地址一致,从站立即对该命令进行解析,并按照命令帧中的通信要求组织和装配响应帧向主站回传[9]。
2.2 路灯终端地址分配
Modbus寻址空间分配如表1所示,其中00H为广播地址,专门用于对所有终端进行统一控制;F8H~FFH保留备用;01H-0F7H则用来给每个子终端定义地址。为了使上位机对精准的控制到每一个子终端,将拨码开关接入在芯片的P0口,开关打开代表高电平1,断开代表低电平0,从而给每个路段以及子终端定义了唯一的地址。当主机与终端通信时,先呼叫某个子节点的地址,唤醒被呼叫的子节点后,主机与子节点之间进行数据交换,未被呼叫的终端则继续进行各自的工作。

表1 Modbus寻址空间分配
3 软硬件设计
系统的载波控制流程如图3所示,上位机通过串口调试软件发送对路段的控制命令,由PL3106对数据进行直序扩频,扩频后的信号经调制后输出,依次通过功率放大、滤波、耦合电路发送到低压电力线上[10]。子终端直接从电力线上接收到集中控制器发送来的信号,在芯片内部进行解调、校验,并执行相应的控制命令,最后将处理结果返回至上位机。
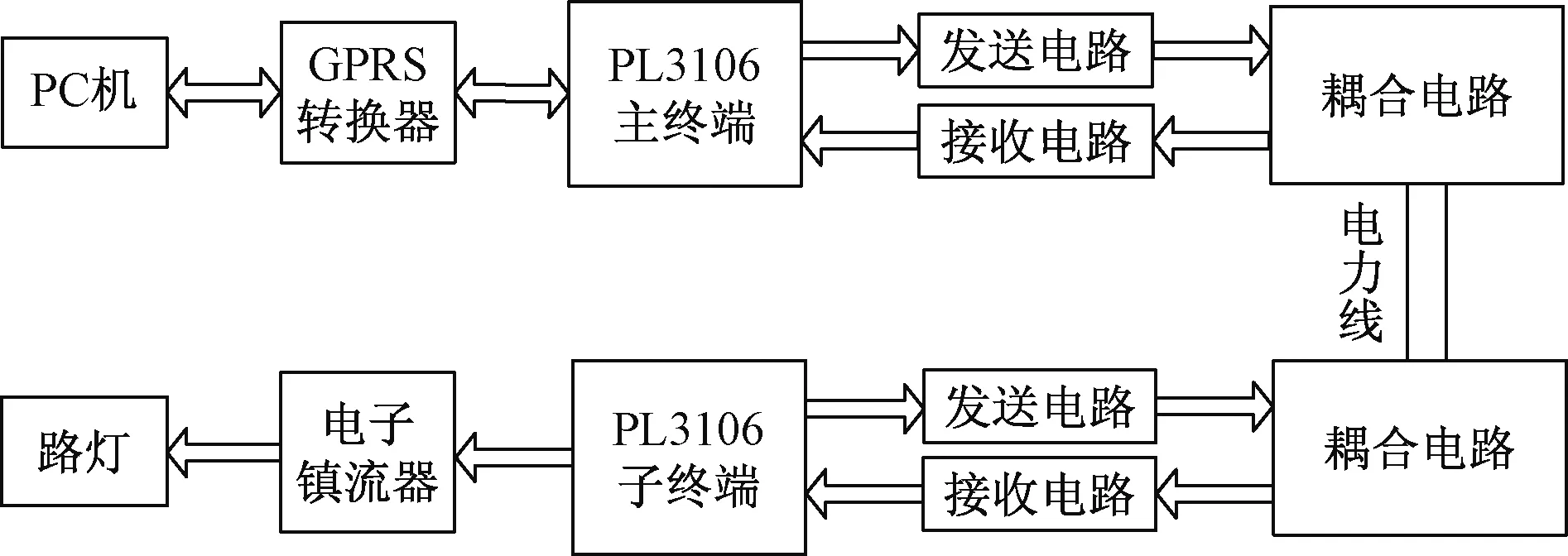
图3 载波控制流程图
3.1 载波通信电路
载波线上的每一个终端既可以作集中控制终端也可以作子终端,载波通信电路如图4所示。集中控制终端可直接从上位机接收命令,在芯片内部进行调制后输出并经电力载波线传输给其他子终端,图5所示为集中控制主终端测得的收发波形对比图。子终端则直接从电力线上接收信息到芯片内部,图6所示为子终端测得的收发波形对比图。
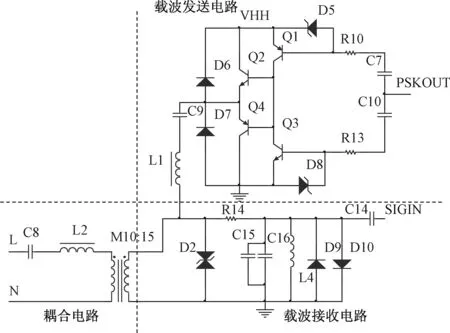
图4 载波通信电路
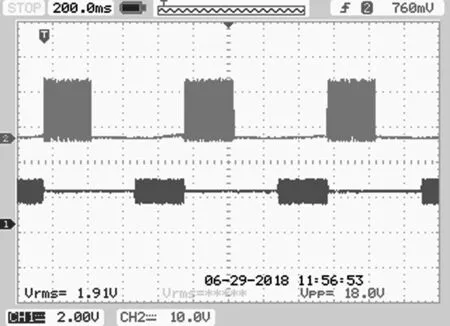
图5 控制终端收发波形对比
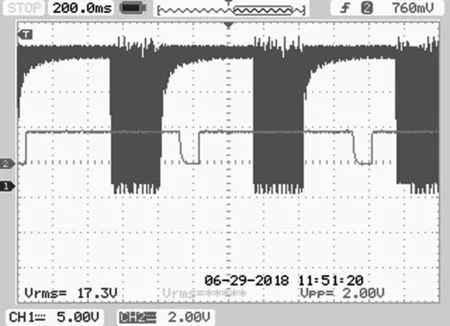
图6 子终端收发波形对比
3.2 软件设计
1)路灯控制总体设计流程。控制软件的总体流程如图7所示,控制终端默认工作在待机状态,当接收到上位机的控制命令后,采用中断的方式实现控制软件的不同功能。初始化后,程序处于等待状态,根据不同控制终端地址差异;当接收到串口命令信息后,进入串口中断;当接收载波命令时,进入载波中断;进入各自中断后先对信息地址进行判断,地址判断正确,接收剩余信息,CRC校验正确,进入信息处理程序;当处理程序完成后同样利用中断将返回信息发出,再次进入待机状态等待下一个命令的到来。
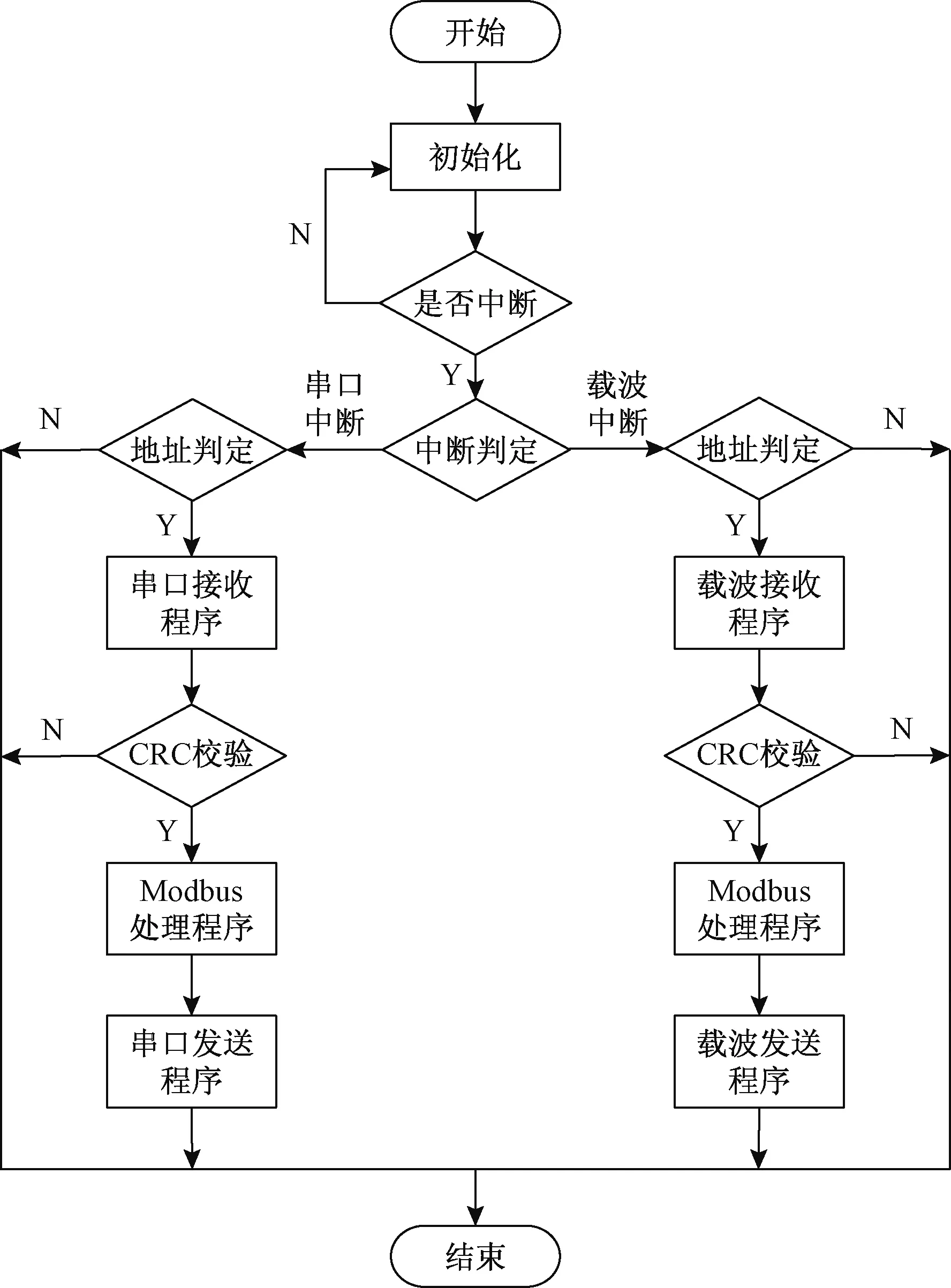
图7 路灯控制主程序设计流程
2)路灯寻址设计流程。图8所示为控制终端寻址流程图,当控制终端接收到上位机发送的命令后,识别并判断其地址位。若为广播地址,则对所有路段进行统一控制;若为路段地址,则对被控路段进行相应的功率控制和调节,其余路段保持不变;若为控制子终端地址,则对单个子终端进行精准控制和通信,最终实现在不同情况下的不同功率调节,并向上位机返回处理结果。
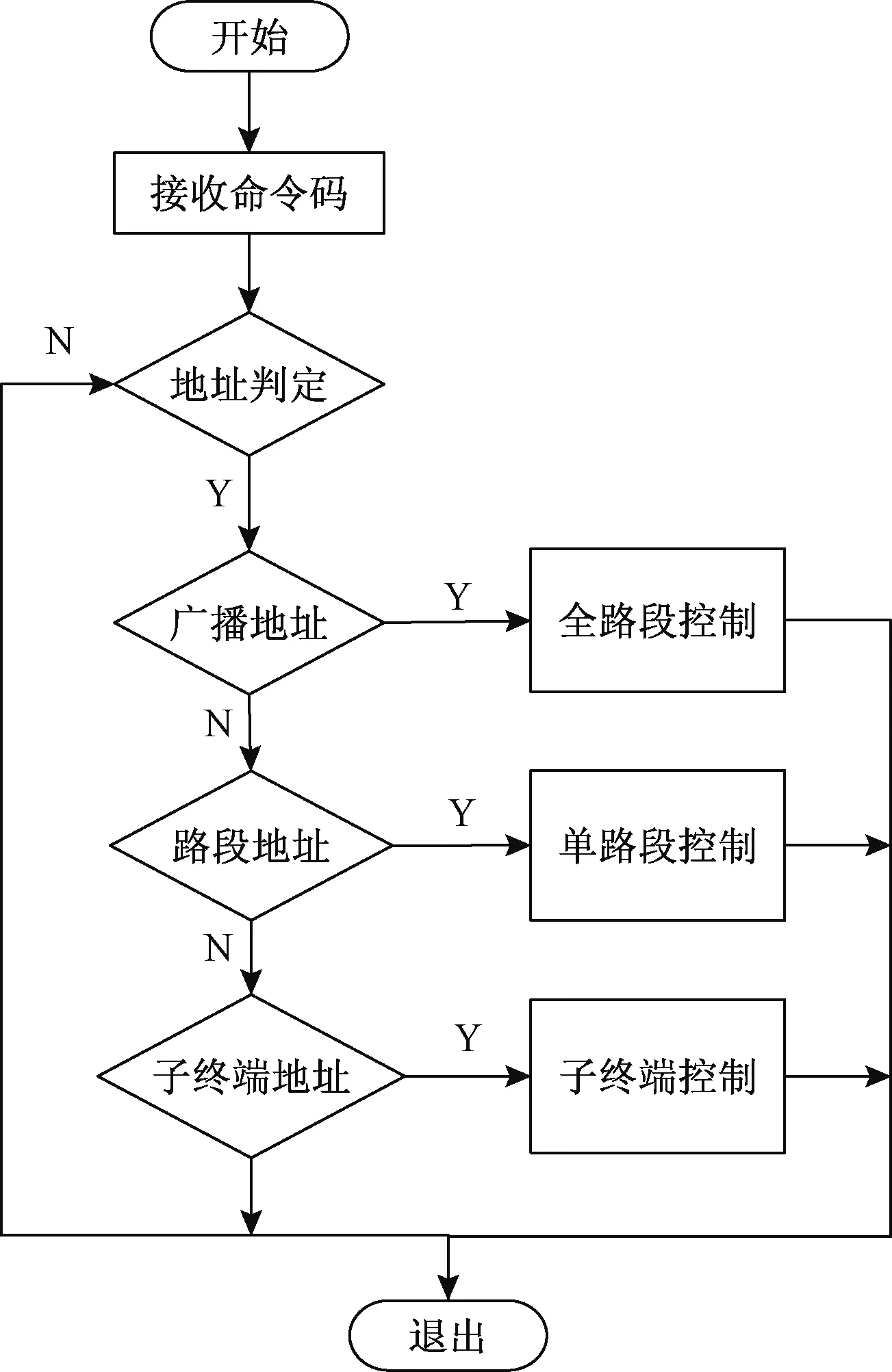
图8 控制终端寻址流程
4 数据测试
串口通信采用10位异步收发的工作方式,上位机通过串口调试软件分别向路段F0发送100%的功率控制命令(F0 05 00 01 FF 00 DB C8);路段E0发送75%的功率控制命令(E0 05 00 02 FF 00 4B 3A);单个路灯路灯F2、E3发送50%功率控制命令(F2 05 00 03 FF 00 39 C9)(E3 05 00 03 FF 00 78 3A),通信结果如图9所示。
5 结论
对上位机在全路段、单个路段以及若干子终端进行控制的情况下,进行载波通信测试,我们发现:各个路段以及子终端能够精确地接收到上位机发送的指令,并对该指令进行相应的处理,最终成功地将处理结果返回至上位机。由实验可知整个通信过程中收发信息完全一致,即我们实现了路灯的远程精准控制与通信。
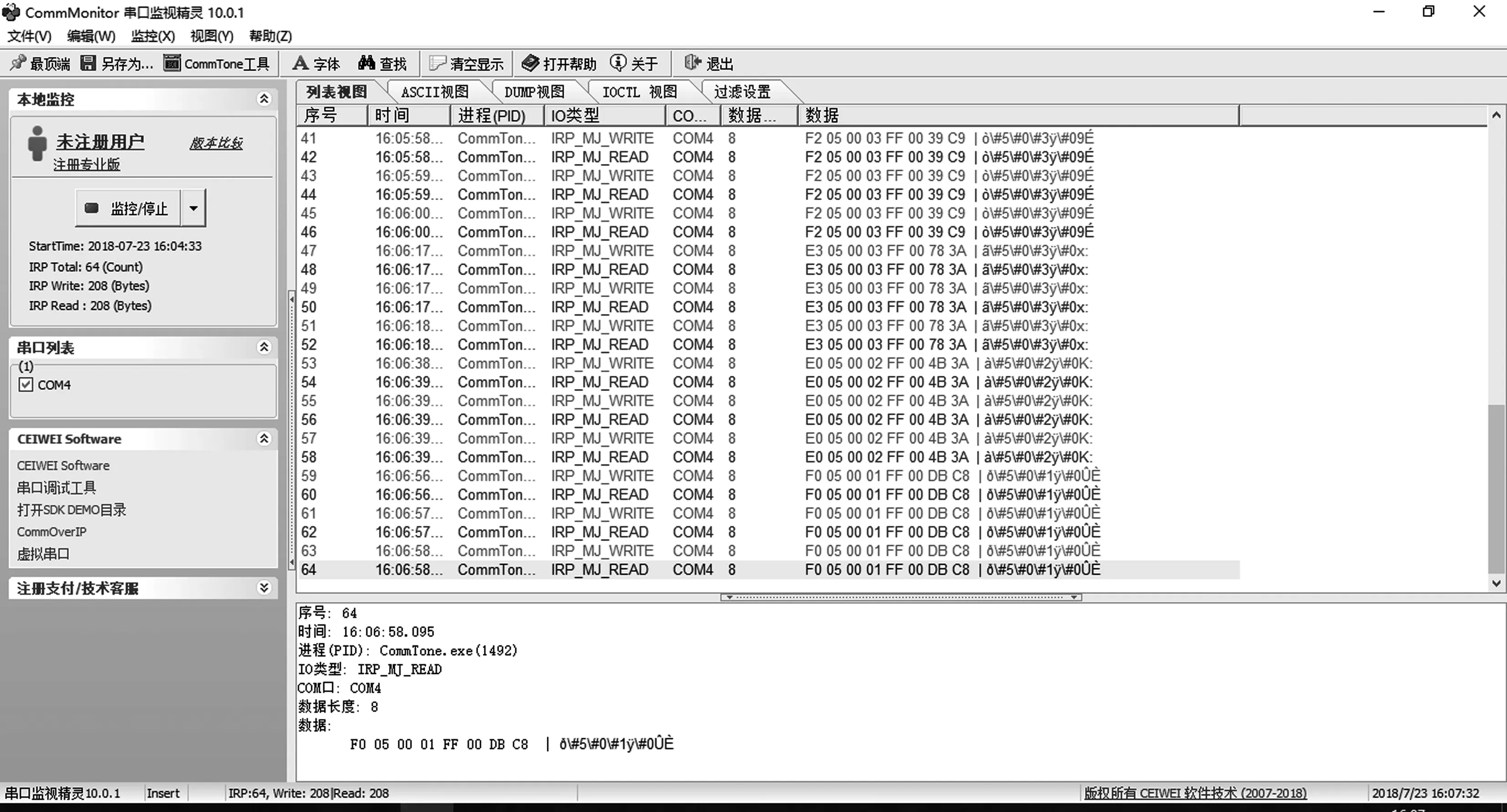
图9 通信串口收发数据