重卡驾驶员视野盲区监控系统介绍
2019-09-26张正轩黄娜陈润龙张龙岗
张正轩,黄娜,陈润龙,张龙岗
重卡驾驶员视野盲区监控系统介绍
张正轩,黄娜,陈润龙,张龙岗
(陕西重型汽车有限公司汽车工程研究院,陕西 西安 710200)
盲区监控和报警已经成为车辆的常规配置,特别是在重型卡车上。部分地区已出台相应的法规对重型卡车的盲区监控提出了要求。文章主要介绍重卡盲区监控系统的设计、器件选型、盲区监控校核方法以及图像处理的关键技术。
重卡;盲区监控
前言
随着国内经济建设的快速发展,我国重型卡车保有量越来越多,由于重型卡车盲区较多,所以极易造成交通事故,且一旦与重型卡车发生交通事故,造成的后果极其严重。
重型卡车盲区是指车辆静止或行车过程中,由于车辆高度及长度尺寸较大,导致驾驶员视野受到遮挡所形成的区域,如果盲区内有其他车辆、行人或障碍物体存在时,视野受限的驾驶员无法做出正确的判断和选择操作,从而酿成严重事故。因此,消除重型卡车盲区是解决此类故障的最行之有效的方法。
1 系统解决方案
通过多个摄像头的图像采集并拼接成360°全景图像,驾驶员在操作车辆过程中可主动通过显示系统屏幕了解车辆外围的周边环境,通过超声波雷达探测左右侧及后方盲区内是否有行人和障碍物,如有危险则通过声音或图像闪烁提醒驾驶员,使驾驶员可被动了解到车辆盲区内的情况,从而提高行车安全性。
为了得到全景图像,基于重卡车辆大小,布置前部摄像头、左侧及右侧摄像头、倒车摄像头分别进行图像采集。由于自卸车、城建渣土车行驶主要在工地,其路况复杂,车速较低,故主要通过侧方的超声波雷达进行左右侧盲区监控报警,而牵引车主要行驶路况为高速公路,行驶车速较高,故主要通过毫米波雷达进行超车、变道等情况下的盲区监控报警。
2 主要器件选型
2.1 摄像头
行业中摄像头分为高清版和普通版,普通版采用CVBS模拟信号进行传输,显示效果较差。高清摄像头采用AHD或LVDS传输方式。由于LVDS需要严格的图像传输两端芯片匹配,因此一般盲区监控选用AHD高清传输模式。
按视野区分可分为普通摄像头和广角摄像头。普通摄像头镜头端面一般为平面,视野角度小于90度;广角摄像头:广角摄像头也称全景镜头。工程应用上一般将视角范围大于120度的摄像头称为广角镜头,焦距一般为16mm或更短,如图1。由于其镜头外部的前镜片为抛物线形状且前部突出,外形酷似鱼眼,图像效果也如同鱼眼看到的效果,故行业中也称为鱼眼镜头。

图1 广角摄像头
从上述可知,由于一般的平角摄像头其图像采集范围一般只有90度,因此,在重型卡车上,少数量的摄像头是无法满足全景成像需求的,如图2。如果布置的摄像头数量过多,又会给车辆布置及图像拼接处理造成很大难度,且故障点增多,故平角摄像头方案不适应重型卡车。必须采用广角镜头才可匹配重卡监控需求[1]。

图2 普通摄像头盲区覆盖图
2.2 毫米波雷达
毫米波雷达目前在车辆上主要应用于ACC(自适应巡航)、BLS(盲点监测)功能,其主要特点是自然环境适应能力强,可以穿透大雾、雾霾、尘土较大等,因此在车辆上的应用比较广泛。一般用于前方车辆探测的毫米波雷达采用76GHz发射频率,探测距离可以达到200米。用于后方或侧方探测的毫米波雷达一般采用24GHz,其探测距离可以达到80米。对于重型卡车的超车变道报警功能,选择24GHz毫米波雷达即可满足要求。
2.3 超声波雷达
超声波雷达探测角度较大,但探测距离较近,一般可探测5m范围,其主要应用在汽车的倒车监控以及侧方盲区监控功能。超声波雷达分为40KHz、48KHz、58KHz,频率越高,其探测的灵敏度也会越高。对于重卡盲区监控系统,一般选用58KHz,探测距离可达到4-5米,水平检测角度70°,垂直检测角度30°。
3 视野盲区成像效果分析
在3D软件中(本文以Catia V5R19为例)建立整车数据模型:(1)确定摄像头的安装位置和线束布置走向的可行性;(2)确定广角摄像头图像满足盲区监控区域的需求,并不能有其他零部件遮挡摄像头的视野;(3)确定主要成像特征点是否均在合理的广角角度范围之内,以保证图像还原后,主要区域图像的清晰程度。
以右侧摄像头为例校核视野覆盖及成像效果确认。首先根据初步的可行位置将右侧摄像头布置到位,沿摄像头中心与车辆最前端做直线并延伸至地面,延长线与车辆之间的距离即为图像盲区,如果盲区过大,需将摄像头安装位置外移直至盲区距离满足设计要求,同时确定线束布置的可行性。其次,按图3进行右侧摄像头显示效果确认,按照一般车道线宽度,这里取车辆外侧大概4米位置处的特征点,点1、点2为典型的右侧A柱盲区,点3、点4为右侧盲区,点7、点8为右后方盲区,点2处前方摄像头负责区域,点5、点6、点8处于后方摄像头显示的主要区域,所以不用关注,点1及点7分别为右侧图像与前方、后方拼接特征点。

图3 右侧盲区特征点布局图
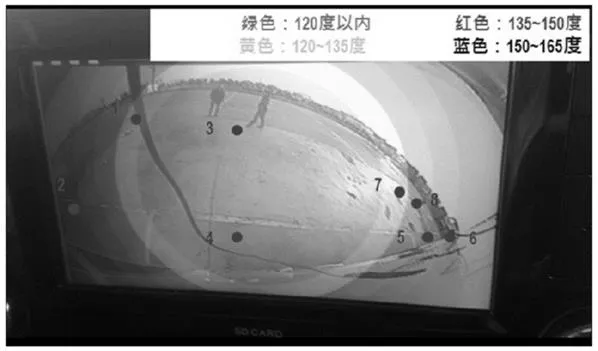
图4 右侧图像效果
点3、点4位于120°以内,点1位于135°以内,点8位于150°以内,所有的盲区特征点以及拼接特征点均位于150°以内,显示效果清晰。
4 图像处理
广角镜头直接获取的图像中显示出来的特征点相对于空间中的实际点在位置上发生了旋转或偏移,如果图像中的点相对空间中实际点的位置为等比例的偏移与旋转则称为线性几何畸变。同样的,如果为非等比例偏移和旋转,则为非线性几何畸变。将产生畸变的图像还原为物理空间中的实际显示效果,称为畸变还原,目前一般均采用棋盘格标定技术进行校正畸变[2],其校正的过程就是图像变换的过程,通过坐标的转换完成畸变还原。
确定图像位置:为了确定拼接摄像头采集图像的相对位置,需将图像中的SIFT特征向量提取出来并根据特征进行匹配。
图像拼接:拼接算法使用渐入渐出加权平均法对图像进行融合,从而实现360°全景拼接图像平滑过渡[3]。
5 系统功能实现
5.1 行车模式
系统上电后,通过多媒体显示360°全景图像,便于驾驶员在行车前对周边进行检查,当车辆后方或侧方5米内有行人或其他障碍物存在时,通过多媒体相应侧放大图像中的闪烁符号以及扬声器的声音提醒驾驶员危险存在。行车过程中,通过左右侧及前方摄像头的拼接图像放大显示行驶过程中主要关注的区域。
5.2 倒车模式
倒车模式受倒档信号的控制,倒车过程中,通过左右侧及后方摄像头的拼接图像放大显示倒车过程中关注的后方区域,同时通过侧方雷达和倒车雷达提醒驾驶员潜在危险的存在。
5.3 转弯模式
当车辆转弯时,如右转弯,系统接收到组合开关的右转向信号,通过右侧摄像头放大显示右侧盲区内的状况,以消除重卡右转弯时的内轮差盲区,同时通过侧方雷达提醒驾驶员是否有潜在危险。
5.4 高速模式
当车辆行驶速度大于40km/h时,毫米波雷达进入工作状态,当后方有车辆进行超车或驾驶员进行主动超车时,系统通过相应侧A柱上的光信号对驾驶员进行提醒,引起驾驶员的注意。
重卡360°全景图像监控及雷达辅助报警使驾驶员全方位的了解到车辆周围的情况,当即将有危险发生时,毫米波或超声波的报警声音信号使驾驶员能够提前采取措施进行规避,提高重型卡车的行车安全。
[1] 张正轩,林广宇.重卡驾驶员盲区监控系统研究[D].西安:长安大学, 2017.
[2] 崔汉国,陈军,王大宇.鱼眼图像校正及拼接的研究与实现[J].计算机工程, 2007, 33(10): 190-192.
[3] 眭昊天,多视点全景图像辅助泊车系统研究[D].苏州:苏州大学, 2014.
Introduction of the Diver's Blind Spot Monitoring System of Heavy-duty Truck
Zhang Zhengxuan, Huang Na, Chen Runlong, Zhang Longgang
( Automobile Engineering Research Institute, Shaanxi Heavy Vehicle Co., Ltd., Shaanxi Xi'an 710200 )
Blind Spot Monitoring and Warning System has become a common configuration of vehicle, especially on heavy-duty truck. Some districts have released regulation on heavy-duty truck Blind Spot Monitoring System. The main purpose of this article is to introduce system design, main parts chosen and key technology about blind spot covering investigation and imaging dealing.
Heavy-duty Truck; Blind Spot Monitoring System
U471.3
A
1671-7988(2019)18-100-03
U471.3
A
1671-7988(2019)18-100-03
张正轩,就职于陕西重型汽车有限公司汽车工程研究院。
10.16638/j.cnki.1671-7988.2019.18.033
