基于MAS的无人机新型编队算法
2019-09-23纪志坚
王 潇,纪志坚
(青岛大学自动化学院,山东 青岛 266071)
0 引言
1991年海湾战争中无人机得到成功运用,近几十年已有30多个国家投入巨额财力和大量人力来生产和研究无人机。经过长久的发展,无人机技术已相当成熟,并在各个领域中发挥了重要作用。无人机群是近十几年提出的无人机合作化发展的一个核心概念[1]。无人机群是多智能体系统(MAS)的典型应用,目前无人机群已逐步担当起侦察、预警、监视、指挥控制、通信、测绘、作战等任务[2]。无人机群构成了一个比单架无人机更有效的系统,而编队控制是协调无人机之间协作的关键步骤[3]。一般而言,编队控制的问题是找到一种分布式协调方案,使无人机能够到达并保持一些理想的、可能随时间变化的编队[4]。

在本文中,主要研究基于一致性的无人机群控制问题,设计了一种基于MAS的无人机群新型编队控制算法。新算法中不存在显式领导者,即所有个体对领导者的指定一无所知,可以根据动态需要指定领导者。尽管新算法中的某些分式与现有协议中的分式相似,但该算法所操纵无人机的群集行为将显著不同。没有明确的领导者,这表明,知情者不仅需要扮演领导者的角色,跟踪全局轨迹,而且还必须积极、含蓄地融入到群体中。因为领导者可能在高风险环境下被击落,或者需要停止当前的任务来承担新的任务,基于本文设计的编队控制算法,每架无人机在有需要时可以动态随机地指定为领导者,所以对军事应用也具有非常重要的意义。
在本文第2章节,介绍了基础知识和准备工作。在第3章节中给出了编队控制算法,并利用Reynolds提出的凝聚、分离和调整规则证明了该算法的可行性[17]。第4章节中给出了数值仿真来说明算法的有效性,第5章节对本文进行了总结。
1 基础知识和准备工作
1.1 基础知识
设G=(V,E,A)为加权无向图,其中顶点集设为V={1,2,…,N},边集E⊆{(i,j):i,j∈V}和加权邻接矩阵A=[aij]N×N,描述了无人机之间的交互拓扑结构。如果i和j之间存在边eij∈E,则表明两个点可以相互接受对方信息,此时无人机j被称为无人机i的邻居,无人机i的邻居集合可以被定义为Ni={j|j∈V:eij∈E}。当且仅当j∈Ni(j≠i)时,加权邻接矩阵A中的元素满足aij=aji=1,否则aij=0。将无人机个体按照是否接受外部控制输入分为领导者与跟随者,领导者集合表示为Vl={1,2,…,M},M≤N;Vf=VVl表示剩下的无人机集合,即跟随者集合。如果无向图G是连通的,则任意一对不同的顶点i和j之间有一条路径。另外,拉普拉斯矩阵L=[lij]N×N定义为
(1)
由以上定义可知,在无向图G中,矩阵L的对角线元素为其所在行剩余元素之和的相反数,即矩阵L的每行元素之和为零。当且仅当无向图G连通时,易证明矩阵L存在零特征值,而所有其它特征值都为正值,因此矩阵L是半正定的。此外,拉普拉斯矩阵满足如式(2)的平方和性质[18]:
(2)
其中,M=[M1,…,MN]∈RNn,Mi∈Rn,i=1,…,N。
1.2 准备工作
假设一个无人机群由N个个体组成,用1,…,N表示,从编队控制的角度来分析,这些无人机中的每个个体都可以看作点质量。无人机群的编队控制可以分解为水平和垂直方向编队问题,实践表明,水平轨迹控制器比垂直轨迹控制器具有更大的时间常数,本文仅考虑水平运动一致性。如果所有无人机都具有相同的有限的环境感测范围,只能在自己的感测范围内发现群体同伴,则无人机i的邻居集可描述为
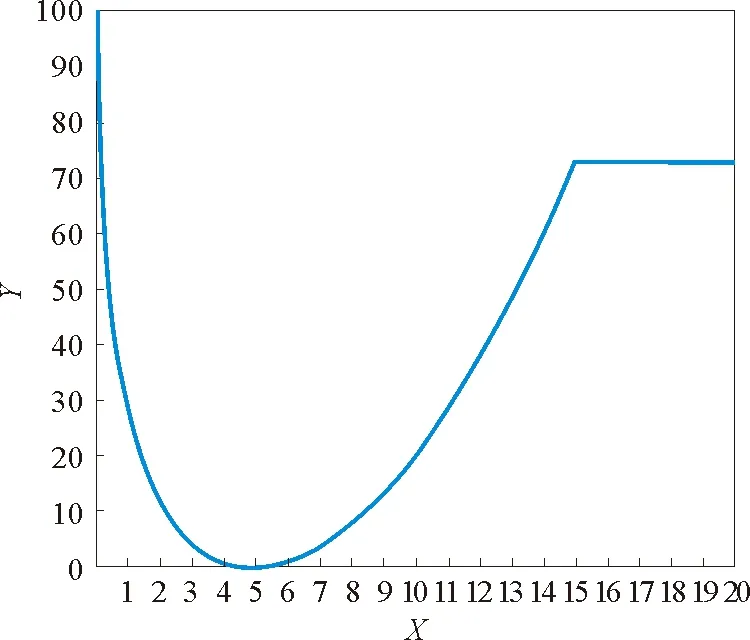
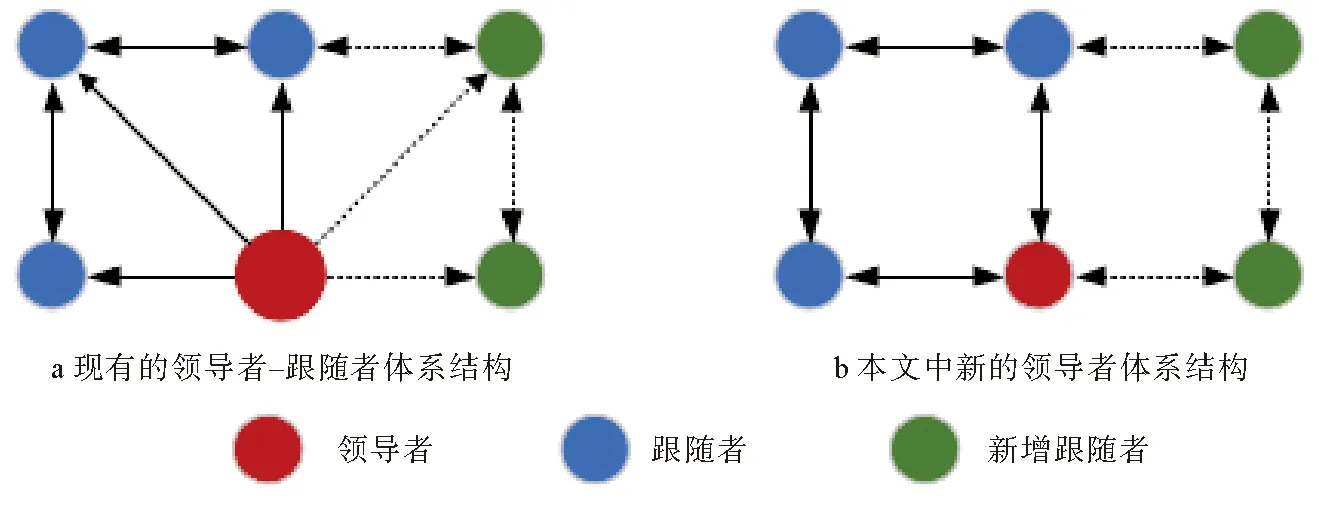
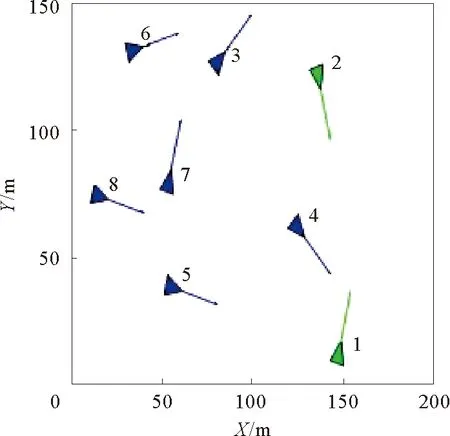
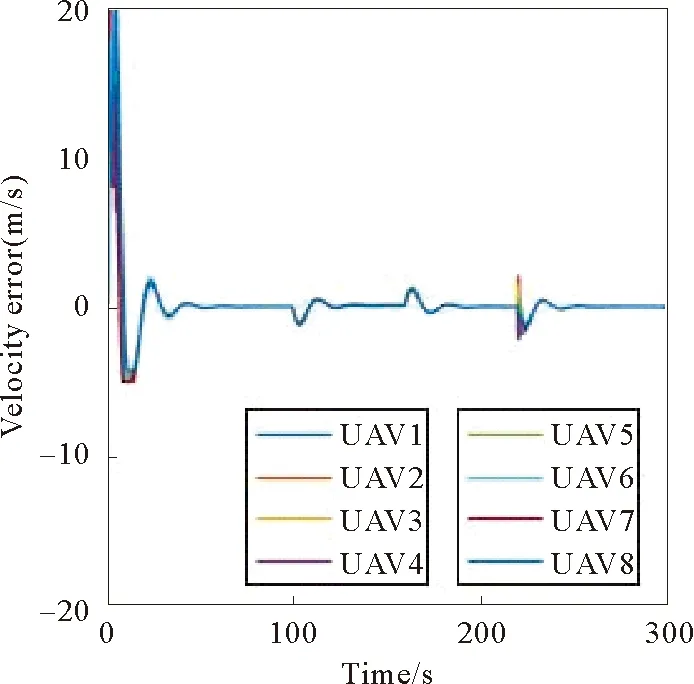
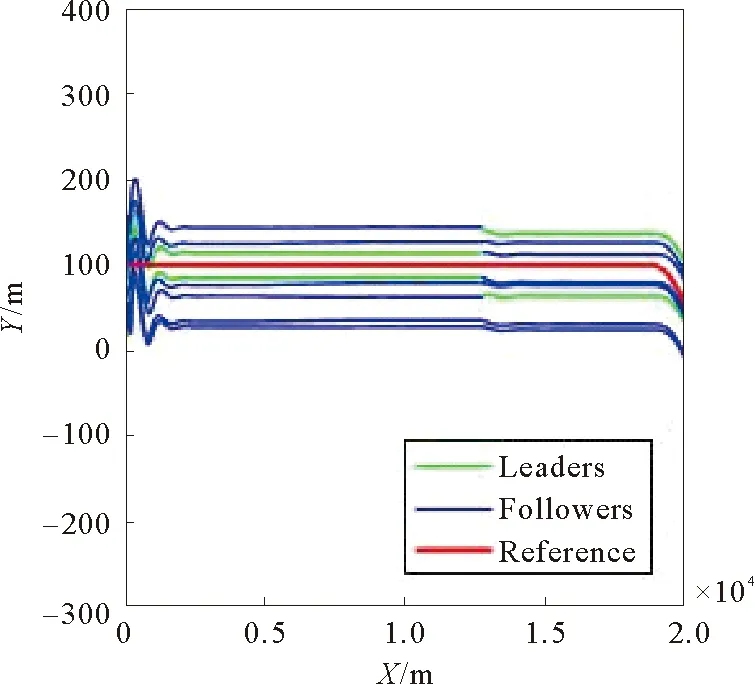
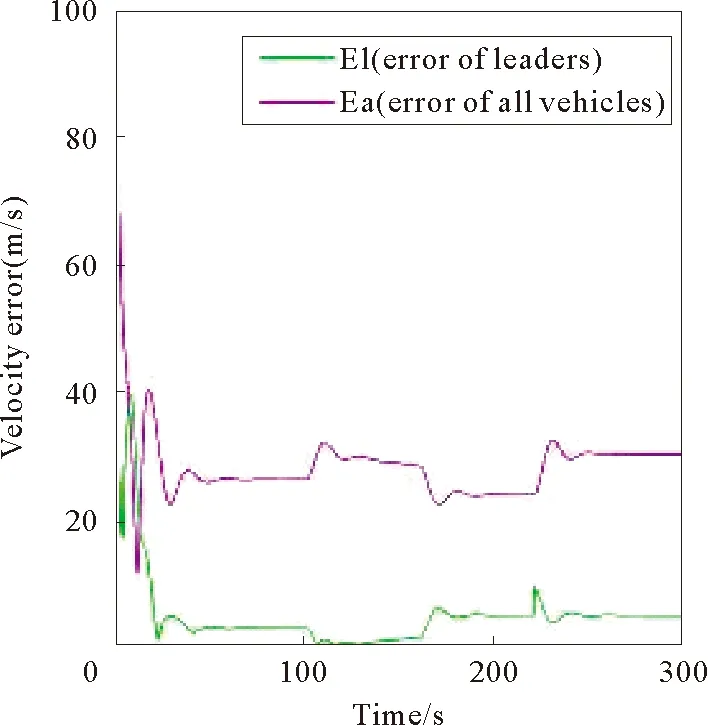
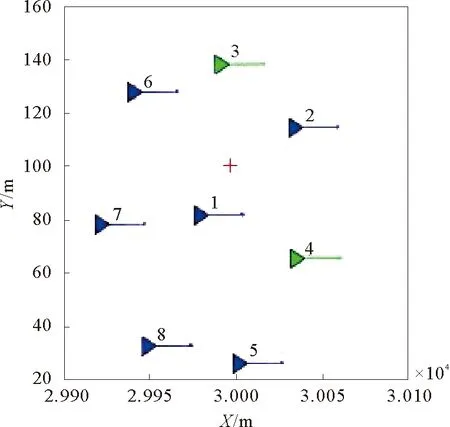
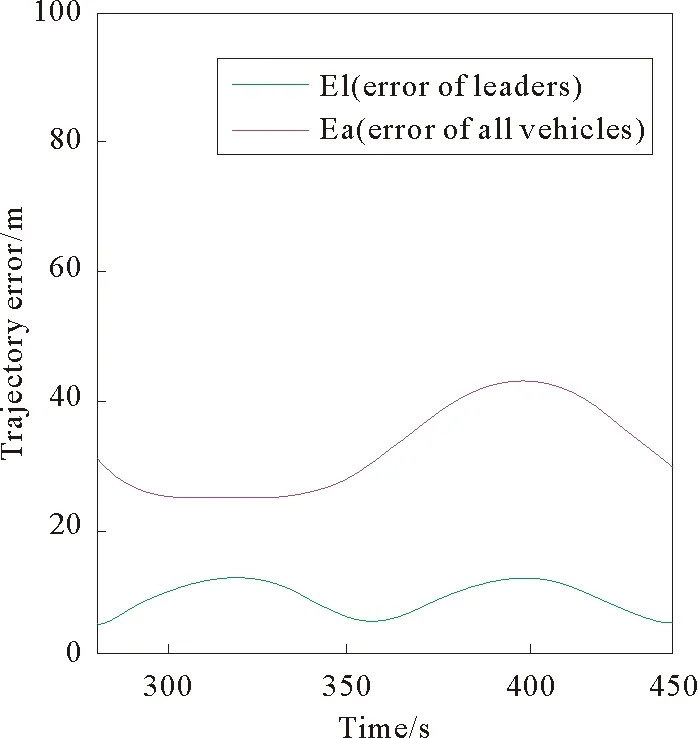
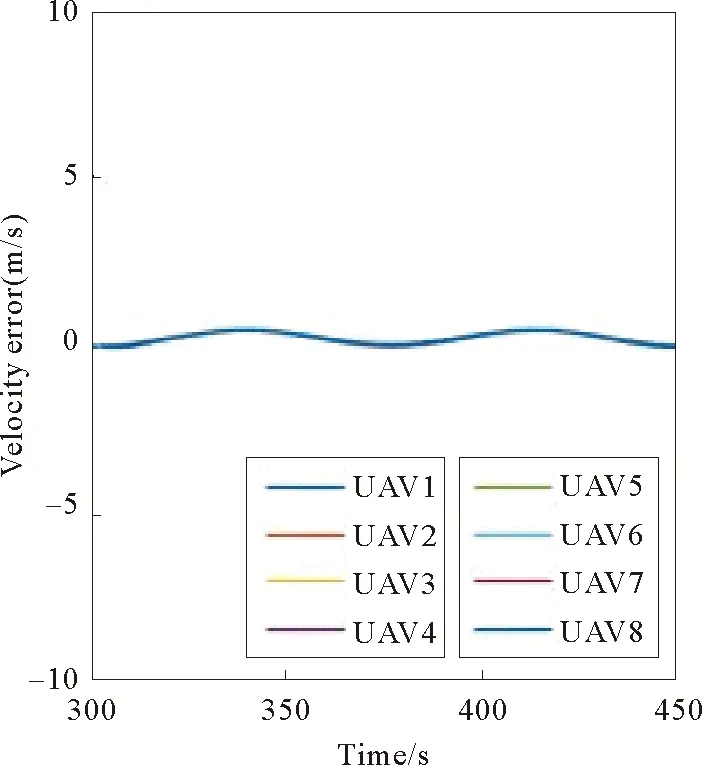
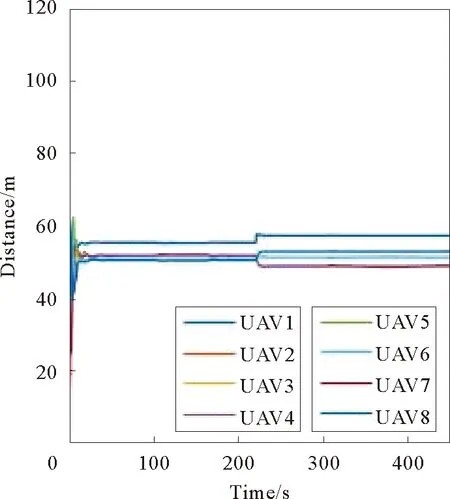
Ni={j:‖pij‖ (3) 其中,pij=pi-pj是无人机i到无人机j的位置矢量,R是感测范围。在实际应用中,无人机群的系统输入是预先定义好的。对于每一个领导者i∈Vl,其系统动力学方程为 (4) 如果i∈Vf,无人机i为跟随者;基于实现坐标转换且轨迹二阶连续可微,系统动力学常表现为 (5) 其中,p、v、u分别为位置、速度和加速度输入矢量。 领导者的fl(pl,vl)是无人机群跟踪控制器设计最关键的一步。考虑到跟随者的输入,本文构造了一个广泛使用的分布式控制器协议,以此来引导某些数量的跟随者组成群体,并以适当的相对距离和方向跟踪领导者,该协议表达式为 (6) (7) 符号Vij(‖pij‖)代表无人机i与无人机j之间相对距离可微、非负的人工势能函数。它用来调节群体中的分离和聚集运动,满足如下条件: 1)为避免与太近的无人机个体发生碰撞,当‖pij‖→0时,Vij(‖pij‖)达到最大值V0(V0→+∞)。 2)当无人机i和j位于期望距离时,Vij(‖pij‖)达到其独特的最低值Vd(Vd=0)。 3)如果无人机i与无人机j相对距离超过有效感测范围时,Vij(‖pij‖)保持一个常量VR。 根据如上要求,本文设计的势能函数如下: (8) 图1 d=5,R=15时的势场函数YFig.1 Potential field function Y at d=5, R=15 特别注意的是,大多数现有的编队控制方法都是为移动机器人设计的,它们的约束比无人机的约束要容易得多。对于在水平方向上飞行的无人机,其运动方向一般可分为切向跟横向,分别用上标t和n表示,为确保无人机在飞行范围内飞行,单个无人机的实际约束,包括速度、加速度和角速度,可以描述如下: (9) 假设无人机群中只存在一部分领导者,剩余个体为跟随者,则集成协议(4)、(5)和(6),控制器协议可以改写为(10): (10) 系数αi是一个事件触发变量,当无人机i接收全局轨迹信息是领导者时,αi=1;如果无人机i是跟随者时,αi=0。基于式(10),无人机i分布式控制协议设计为 (11) f(uid,vid,pid)=uid-b2(pi-pid)-b3(vi-vid) 本文只考虑水平运动一致性,可得u1d=…=uNd=ud,v1d=…=vNd=vd,p1d=…=pNd=pd,则控制协议可以改写为(12): (12) f(ud,vd,pd)=ud-b2(pi-pd)-b3(vi-vd) 在本节中,利用定理一给出了无人机群运动一致性和编队控制协议的主要结论。基于定理一中的内容,对新型分散控制协议进行了理论分析和证明。 定理1假设一组N架无人机,动力学描述为(10)并且由控制输入函数(12)控制,初始相互作用图G0(t=0)是无向连通的,Q(0)表示初始时刻无人机群总人工势能和相对动能之和,则得到以下结论: 1)在新型控制协议下,无人机群通讯消耗减少,系统更具有可伸缩性。 2)在Q(0) 3)在Q(0) 4)所有无人机的速度逐渐收敛于期望值。 证明:首先证明定理1的第1)部分,其次证明定理1的第2)、3)、4)部分。 图2 信息流程图Fig.2 Information flow chart 现存的控制协议体系结构中的信息传递图由图2a表示,本文设计的控制器协议(12)中的信息传递图由图2b表示。从图2中可以直观地看出,在无人机个数相同的情况下,图2b边数较少,也就是说,在多个领导者的无人机编队中,通信消耗会减少,领导者越多编队队形越大,两种协议的消耗差距也会更大,若再添加一个新的无人机,图2b需要添加更加少的边,说明新型控制协议比现存控制协议更具可伸缩性,即证明了定理1的第1)部分。 在不失一般性的情况下,假设前M辆无人机被指定为领导者,且1≤M≤N,系统运动误差定义为 (13) (14) Q(t)表示所有无人机之间的总人工势能和总相对动能之和,然后表达式为 (15) 由系统运动误差定义可将式(15)改写为 (16) (17) (18) 因此,有 (19) 然后,取Q(t)对时间的导数得到: (20) 假定αi=1代表领导者,αi=0代表跟随者,通过将式(14)代入(20),有: (21) 方程(21)可以简化并以矩阵形式表示为 (22) (23) (24) 因为假设前M辆无人机被指定为领导者,对于领导者αi=1,对于追随者αi=0,式(23)就意味着所有领导者的速度误差渐近收敛为零,所以: (25) 通过式(2)中描述的平方和性质,我们从式(24)可以得到式(26): (26) 由式(25)和(26)可知,所有无人机的速度误差收敛到零,即,这就意味着所有无人机的速度渐近收敛于期望值。从而证明了定理的第4)部分。 从而完成了定理1的证明。 在实际应用中,加速度和角速度受到有效横向负载的限制。因此,无人机之间的初始距离及其相互作用距离必须足够远,初始速度也应较小,以满足Q(0) 在本节中,将进行数值仿真模拟,进一步说明理论结果,并验证新型编队控制协议的有效性。在二维空间中,用协议(14)引导8架无人机进行运动,仿真过程分为两个阶段。在第一阶段,随机分布的8架无人机被引导进行直线编队飞行,以此来验证协议的速度跟踪、轨迹跟踪以及动态领导者重新分配能力;第二阶段,模拟高空避障,编队被引导进行V型曲线飞行,验证该协议在轨迹剧烈变化下的速度与轨迹跟踪能力。只有领导者有关于全局轨迹的信息,相对于全局轨迹的平均位置误差定义如下: 其中,El和Ea分别为领导者和整个编队的平均轨迹误差,M为领导者的数量,N为整个队形中的无人机数量(领导者和追随者)。 感测距离R=200 m,期望距离d=80 m,最大加速度umax=6 m/s2,有效横向负载ng=6,其它参数设为b1=0.8,b2=0.5,b3=1,在整个仿真模拟过程中,上述所有参数都保持不变。 本阶段的目的是用该协议引导无人机编队进行直线飞行,以此来验证速度跟踪、轨迹跟踪和动态领导者重新分配能力。如图3所示,从[0 m,200 m]和[0 m,150 m]中随机选8架无人机的位置,并且它们的速度和方向分别随机设定在区间[40 m/s,90 m/s]和[-π/2,π/2]中。在模拟开始时,1、2号无人机被指定为领导者,模拟持续300 s(从0 s到300 s),步进0.1 s。当t=110 s时,预计无人机群将以0.5 m/s的速度开始加速,直到速度达到75 m/s。在图4、5中分别给出了速度以及速度与期望速度的误差。从图4中可以看出,期望速度被领导者与跟随者很好地追踪;图5表示无人机的速度误差,从而验证了速度跟踪能力。图6显示了无人机的轨迹,注意x轴和y轴的比例不同;图7表示轨迹跟踪误差,从中可以看出,领导者的平均误差较小,而整个编队的平均误差相对较大,由于领导者受跟随者的影响,参考的轨迹不可能完全匹配,考虑到编队规模时,则在可接受的范围内,因此验证了该算法的轨迹跟踪能力。值得注意的是,T=230 s时,图4、5、6、7发生的波动是因为编号1、2号的无人机变为跟随者,编号3、4号的无人机重新被指定为领导者,这验证了无人机编队领导者重新分配能力。 图3 编队初始状态Fig.3 Initial status of formation 图5 0~300 s速度误差Fig.5 Speed error during 0~300 s 图6 无人机轨迹Fig.6 UAV trajectory 图7 0~300 s轨迹误差Fig.7 Trajectory error during 0~300 s 图8 350 s时编队状态Fig.8 Formation status at 350 s 这一阶段的目的是证明该协议在模拟障碍物和高风险空域避让时的轨迹跟踪能力、速度跟踪能力。第一阶段的最终状态被视为该阶段的输入,引导编队以75 m/s等速进行V型曲线飞行。模拟持续150 s(从300 s到450 s),步进0.1 s,图8显示350 s时的编队状态,图9为该阶段无人机的轨迹。图10为领导者和无人机编队的平均轨迹误差,表明该阶段无人机的轨迹跟踪是可以接受的。该阶段的速度误差如图11表示,表明在整个轨迹跟踪过程中,领导者和追随者都能很好地跟踪参考速度。整个仿真过程中无人机与其最近邻居之间的距离如图12所示,从图12可以看出,无人机之间的最小距离均大于零,说明无人机之间的避碰是成功的。仿真结果表明,该算法能够实现轨迹与速度的渐近跟踪,即使轨迹在运动过程中发生剧烈变化,该算法仍然有效。 图9 V轨迹Fig.9 V trajectory 图10 300~450 s轨迹误差Fig.10 During 300~450 s trajectory error 图11 300~450 s速度误差Fig.11 Speed error during 300~450 s 图12 无人机之间最小距离Fig.12 Minimum distance between UAVs 本文对无人机群的运动一致性和编队控制进行了研究,提出了一种新型的无人机群编队控制算法,并对系统的稳定性进行了证明。结果表明,初始交互图是连通的情况下,无人机编队可以很好地完成轨迹与速度的渐近追踪并且不会发生碰撞。通过数值模拟验证了速度与轨迹跟踪能力,即便轨迹变化剧烈,也能以期望的速度跟踪预定的轨迹。


2 编队控制算法
2.1 算法描述

2.2 主要结果






3 仿真研究与分析
3.1 第一阶段
3.2 第二阶段

4 结论
