电动汽车用模糊PID 控制的PMSM 控制器 策略研究
2019-09-21杨启东任佳越秦玉贵
杨启东,任佳越,秦玉贵
(长安大学汽车学院,陕西 西安 710064)
前言
在电动汽车驱动系统中,永磁同步电机(PMSM)具有体积小、功率密度较高、调速范围较宽、输出转矩较大等诸多优势,故此得到了广泛的应用及研究,尤其是近年来电动汽车的驱动电机大多采用永磁同步电机[1]。在电动汽车PMSM 控制系统中并将未其优越性极大地发挥,仍然使用简单易行PID 调节器是一个主要因素,虽然PID 控制算法简单,易于实现,但主要依靠人们的经验获得,因为参数一旦确定后不能实时调整,故此自适应性和鲁棒性比较差,然而,当电动汽车行驶在复杂工况下对控制系统的动态控制性能以及抗扰动能力要求较高[2],因此,简单的PID 控制器可能没有办法很好保持系统的优良性能。而在设计模糊控制器时候,无需依靠被控对象的精确数学模型,只需要将人们的长期控制经验归纳成规则表并存于电动汽车的MCU 中实时查询,因此,系统的实时性高、鲁棒性强,尤其适用于非线性系统的控制,本文提出将传统PID 控制和模糊控制的合二为一,设计在了一种适用于PMSM的模糊PID控制器以取代传统的PID 控制器,通过仿真实验的结果,不难证明所设计的控制策略可以很好地完成PID 参数的自整定工作,达到了提高动态性能与鲁棒性的要求[3]。
1 永磁同步电机调速系统基础理论
1.1 永磁同步电机矢量控制的数学模型
交流永磁同步电机调速系统采用矢量控制方案,其基本思想是将普通的三相交流电动机上设法模拟直流电动机转矩控制的规律,在磁场定向坐标上,将电流矢量分解成产生磁通的励磁电流分量和产生转矩的转矩电流分量,并使两分量相互垂直,彼此独立,然后分别进行调节,这样将其与直流电动机从原理和特性上就可以等效了。因此矢量控制的关键是对电流矢量的幅值和空间位置的控制。id=0 控制在矢量控制中应用最为普遍,本文采用矢量控制中id=0 的控制方法可以获得很宽的调速范围,转矩定性好,控制系统简单。经过坐标变化,PWSM 在d、q 坐标下的转矩方程为[7]-[8]:

式(1)中,pn为转子磁极对数,ψf为转子磁链,iq、id为定子电流矢量is在d 和q 轴的分量,Ld、Lq是d 和q 轴上电感。
表面式永磁同步电机,采用id=0 的控制方法,Ld=Lq,is与ψf在空间上正交,可以获得最大转矩。这时is=jiq,式(1)可以改写为式(2):

虽然转子以电角度ωr旋转,但是在dq 轴系内is与ψf却始终相对静止,从转矩生成的角度,可将面装式PMSM 等效为他励直流电动机。
1.2 PMSM 矢量控制调速系统工作原理
本文PMSM 调速系统中具有转速、电流双闭环的控制结构,速度外环采用模糊PID 控制器,电流环调节器采用传统的PI 控制算法。图1 为永磁同步电机的矢量控制结构框图。所谓模糊PID 控制是在原有的PID 控制的基础上,需要计算当前的转速误差e 和误差变化率ec,利用所设定的模糊规则进行模糊逻辑推理,通过查询模糊规则表对PID 转速调节器的参数进行调整,使其达到快速性和稳定性的目的。
图1 中,永磁同步电机由三相逆变器供电,通过光电编码器检测转子转速ωr和空间相位θr。由速度调节器和电流调节器计算出定子电压转矩分量Uq和Ud。之后经过坐标变换,通过SVPWM 调制器得到三相调节电压信号,传递给逆变器,最终控制电机驱动。
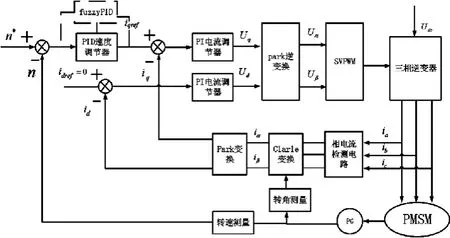
图1 为永磁同步电机的矢量控制结构框图
2 模糊PID 控制器的设计
2.1 模糊PID 控制器的基本原理
模糊PID 控制器是将PID 控制器与模糊控制的思想结合,模糊控制结构如图2 所示。模糊PID 控制器在运行过程中不断检测误差e 和误差变化率ec,并将其模糊化,然后依据模糊规则进行推理,经过清晰化后再输出3 个参数△Kp、△Ki和△Kd给PID 控制器,并依据公式(3)实现对PID 控制器3 个参数的自整定,从而使被控对象的动态性能显著提高[4-5]。
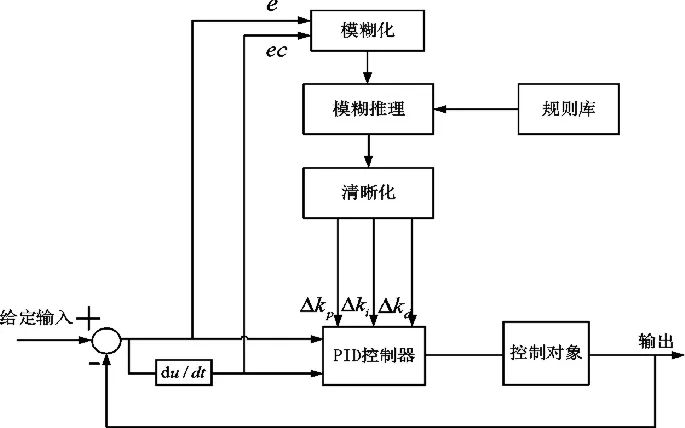
图2 模糊控制结构

式(3)中,Kp0,Ki0和Kd0分别是Kp,Ki和Kd的初始值,△Kp、△Ki和△Kd分别是Kp,Ki和Kd的变化量。
2.2 模糊规则库
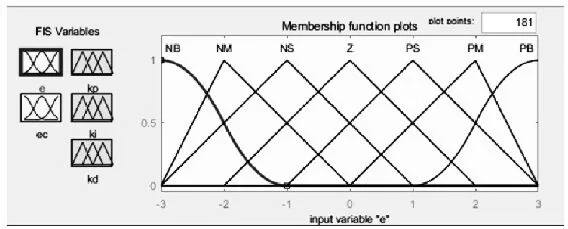
图3 隶属度函数
模糊化是模糊控制任务是需要输人值、输出值从精确值转换为模糊值,将语言变量e、ec,Kp,Ki和Kd量化到有限整数的离散论域,例如{-3,-2,-1,0,1,2,3},并取对应的语言值为{NB,NM,NS,ZO,PS,PM,PB},即负大、负中、负小、零、正小、正中、正大;定义输人和输出变量的隶属度函数,本文为了提高灵敏性,统一选用三角型隶属度函数(如图3 所示)。
针对于模糊PID 控制器的模糊规则表如下:

表1 △kp 的规则表
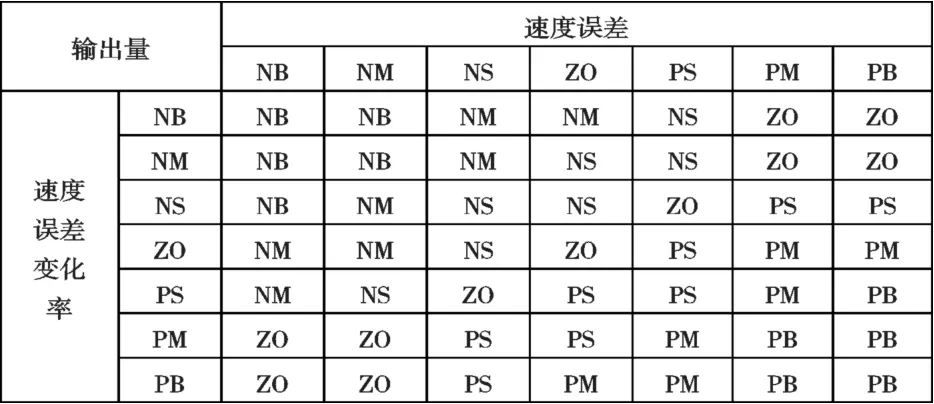
表2 △ki 的规则表
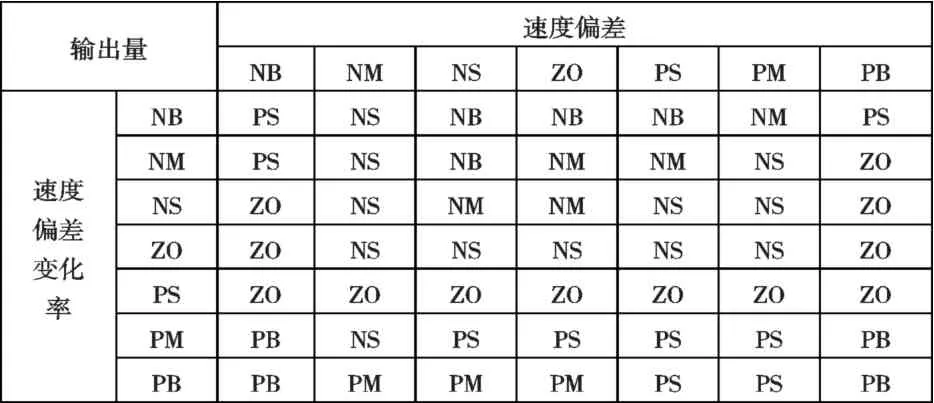
表3 △kd 的规则表
上述规则表中任意一条规则都可以表示成Ri;IF(e is Ai) and (ec is Bi) THEN u is Ci 的形式,则整个规律库可以表示为:
R1:IF(e is NB) and (ec is NB) THEN (△kp is PB) and (△ki is NB) and (△kd is PS).
……
R49:IF(e is PB) and (ec is NB) THEN (△kp is NB) and (△ki is NB) and (△kd is PB).
3 仿真与结果
3.1 仿真模型搭建
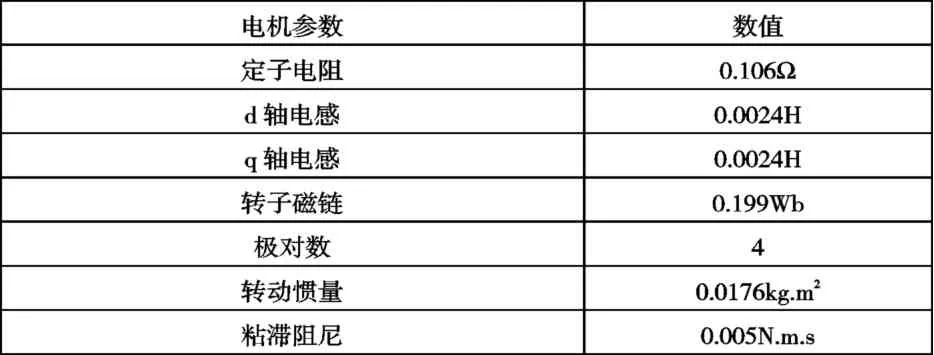
表4 仿真用表面式永磁同步电机参数
验证控制策略的正确性,PMSM 调速系统的MATLAB/ Simulink 模型,比较模糊PID 控制和传统PID 控制两种控制策略的仿真效果,系统直流母线电压为311V,表面式永磁同步电机的相关仿真参数如表4 所示。
初始设置电动机空载启动下参考转速给定值为400r/ min,在0.04s 时,给电机突加100Nm 负载,两个控制策略下转速控制图如图4 所示。
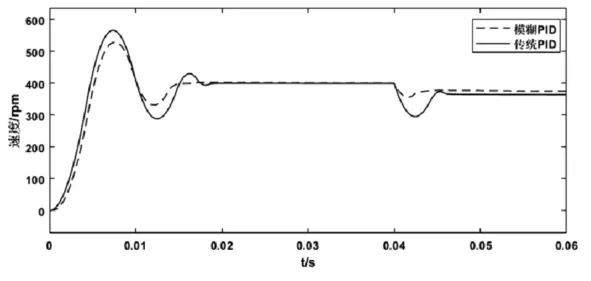
图4 仿真结果对比
在动态性能来看,在空载下给定参考转速400 r/min,采用模糊PID 控制的超调量要小于传统的PID 控制,且最终的调节时间从图也可知要少于传统控制。针对于稳态下抗负载的扰动能力的比较,在100Nm 负载下,模糊PID 控制转速变化的幅度以及恢复时间都要小于传统PID 控制。故此,采用模糊PID 控制永磁同步电机系统的动、静态性能和抗干扰能力都优于传统的PID 控制,波动小,更快趋于稳定,具有较强的鲁棒性。
4 结论
将模糊控制引入到永磁同步电机系统的控制中,将模糊控制的思想与PID 控制所结合。仿真实验结果表明:采用模糊控制器的系统的动性能和抗干扰能力均优于传统的PID 控制,且对于系统的参数变化具有较强的鲁棒性。所设计的基于模糊控制PID 策略下的电机运行具有良好的性能,可以有效提升电动汽车的动力性能,使PMSM 在电动汽车的驱动领域上更大发挥其优越性。