某电动观光车平顺性仿真分析
2019-09-21石明顺温博伦张严芬
石明顺,温博伦,张严芬
(安徽理工大学 机械工程学院,安徽 淮南 232001)
关键字:电动观光车;虚拟样机;平顺性仿真
前言
随着我国经济水平的不断提高以及电动车行业的快速发展,电动观光车作为一种在固定区域内使用的代步车辆,不仅其良好的续航能力和经济性能一直被作为追求的重点,对于整车舒适性的改善,也正逐渐受到广泛关注。整车平顺性作为乘车舒适性的一个重要指标,主要受到路面激励的影响,而整车大多通过悬架系统衰减振动,因此悬架对平顺性具有决定性的影响。传统整车平顺性研究需要对真实车辆进行试验,这样往往耗费较大的人力以及财力。自计算机技术发展以来,国内外已经有很多学者针对汽车行驶平顺性的模型建立和虚拟样机的仿真进行了诸多研究。如何建立合理正确的虚拟样机不仅影响仿真结果的正确性,同时还会影响汽车行驶的舒适性和安全性预测。本文采用ADAMS/View 建立虚拟样机对整车平顺性进行模拟仿真,通过虚拟样机建立了悬架以及整车仿真模型,并通过输入随机输入激励和脉冲输入激励进行平顺性仿真,分析了电动观光车的整车舒适性。
1 虚拟样机模型建立
1.1 整车模型
由于现有五座电动车的实际模型与传统汽车的制作加工略有不同,为了能够真实反应该型号的电动观光车行驶平顺性,本次通过针对实际车辆的零件进行测绘,并且通过运用SolidWorks 建立三维模型。建模过程中,部分电动观光车的车架、悬架、转向机构、动力总成的质量参数和尺寸参数无法通过测量绘制,故选择询问厂家获取五座电动观光车外壳和整车质量参数。五座电动观光车的主要参数如表1 所示:
在搭建完整模型之后,在ADAMS/View 中对零件修改材料属性,建立五座电动观光车动力学模型。最后所得到的整车模型如图1 所示。

图1 电动观光车虚拟样机整车模型
1.2 路面模型
人们在乘车时所感受到的不舒适性是由于汽车行驶在道路过程中的振动所导致的,因此能够有效分析五座电动观光车行驶平顺性的主要任务就是建立合理有效的路面文件。路面输入激励包括随机输入激励以及脉冲输入激励。随机路面即类似于普通公路,没有聚集式较大起伏或凹坑的路面情况。而脉冲路面则变现为聚集式且具有较强冲击式,能够在短时间产生冲击的离散事件,包括减速带、凹坑等路面状况。ADAMS中具有自带的路面生成器,同时在ADAMS 安装包的子文件夹中具有路面谱文件,可以通过对路面谱程序的修改建立所需路面谱文件。模型以路面轮廓的空间功率谱密度与空间频率的函数关系为理论基础,相关函数关系如式1 所示。

式中:n 为空间频率;Ge为空间功率谱密度幅值;Gs为速度功率谱密度幅值;Ga为加速度功率谱密度幅值。
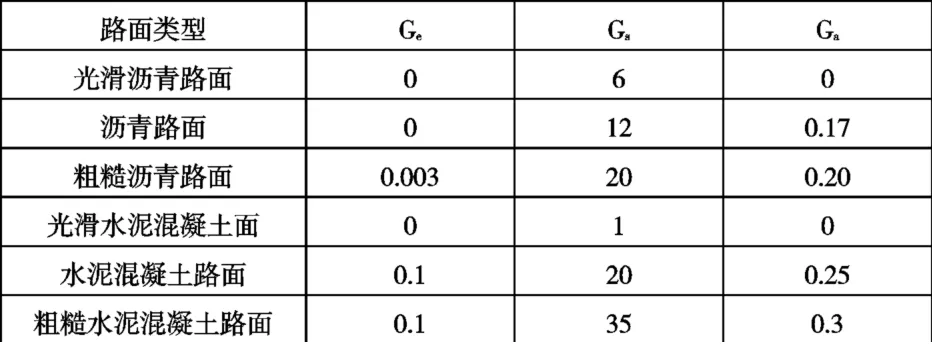
表2 Sayers 模型不平度参数表
若想建立路面谱文件,则在路面生成其中通过输入所需三个参数进行文件建立。表2 为各种路面的轮廓参数。
根据表2,按照粗糙沥青路面的三个系数编制沥青路面文件,并以此路面谱文件作为随机路面输入进行仿真。
2 电动观光车平顺性研究
2.1 随机路面平顺性仿真分析
完成五座电动观光车模型搭建后,导入路谱文件,对五座电动观光车进行行驶平顺性仿真,在随机面上分别以10 、20、30 、40、50km/h 的速度进行仿真,分别得到三向振动加速度曲线。本文选取50km/h 车速进行仿真分析,其他车速等同。
在ADAMS/View 软件中设置仿真时间为10s,考虑到步长略大时仿真模型运算失败,于是设置仿真步长为0.001s。选取设定好的路谱文件作为路面模型,设定车辆速度匀速,进行仿真分析,其处理结果中不同方向的振动加速度时域曲线如图2 所示,不同方向的加速度功率谱密度曲线如图3 所示。

图2 各方向加速度曲线


图3 各方向加速度功率谱密度曲线
分析记录下的加速度时间历程a(t)频谱,得到其功率密度函数Ga(f),计算如式2 所示:
式中:w(f)为频率加权函数;aw为加权加速度均方根值;Ga(f)为功率谱密度函数。
加权加速度均方根值由仿真计算结果导入MATLAB 进行求解,求得结果如表3 所示。

表3 不同车速下加权加速度均方根值
车辆加权加速度均方根值与主观感觉的关系如表4 所示:
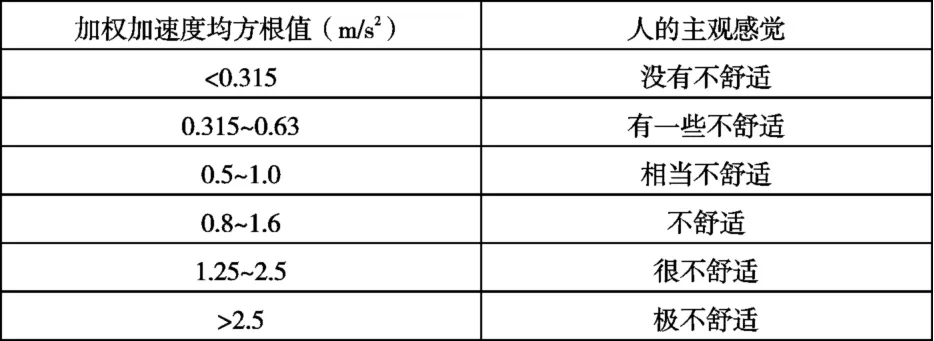
表4 加权加速度均方根值与人的主观感觉之间的关系
通过表3 和4 的对比中可以得到,在五座电动观光车以低速行驶时没有不舒适的现象,当速度达到30Km/h 以上时,会出现有一些不舒适的现象。
2.2 脉冲输入路面平顺性仿真分析
观光车行驶过程中会遇到各式各样的障碍物,如减速带等。所遇障碍物使整车振动输入瞬间增大,这一振动输入急速增大的过程称为脉冲输入。脉冲输入使得观光车振动加剧,影响乘车舒适性。因此对电动观光车进行脉冲输入路面的平顺性仿真分析是极其必要的。
脉冲输入仿真分析过程中,采用脉冲激励来模拟路面减速带。按照三角凸块规格和所测量的减速带的矩形凸块的尺寸,对ADAMS 中的路谱文件进行参数修改。最终确定凸块高40mm,宽400mm,斜坡长15mm,凸块模型横置,如图4 所示。
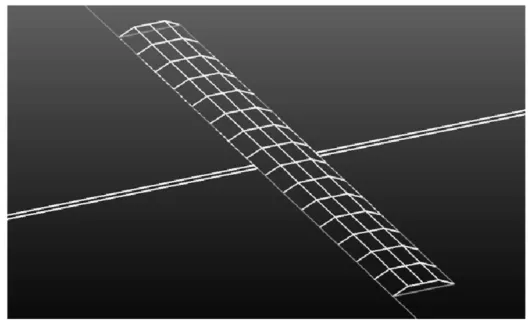
图4 矩形凸块路面
设定五座电动观光车为满载状态,车辆以10、20、30、40、50km/h 的速度行驶过矩形凸块路面,仿真计算所得车辆垂向振动加速度时域曲线,如图5~9 所示。
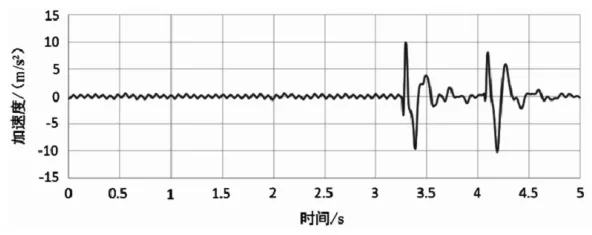
图5 10km/h 驶过矩形凸块的加速度时域曲线
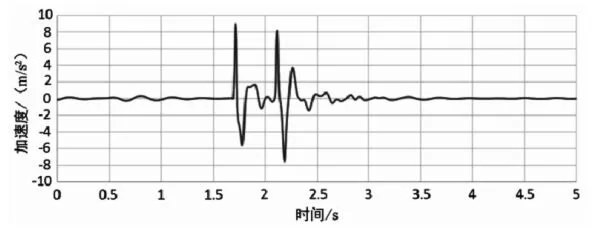
图6 20km/h 驶过矩形凸块的加速度时域曲线

图8 40km/h 驶过矩形凸块的加速度时域曲线

图9 50km/h 驶过矩形凸块的加速度时域曲线
按照GB 9502-86 规定,电动观光车分别以10、20、30、40、50km/h 的车速进行仿真,其车辆最大振动加速度如表5所示。

?
依据ISO5631 草案提出的新指标,标准环境中的矩形凸块脉冲输入对观光车平顺性试验研究有以下指示。当观光车车座表面传递给乘员的最大加速度响应绝对值ACCmax >43.02m/s2时,将危害乘员健康;当ACCmax<31.44m/s2时,对乘员健康无害;当ACCmax 在31.44m/s2与43.02m/s2之间时对乘员健康有一定的影响。并根据表5 显示的结果以及针对脉冲平顺性仿真评价标准来看,该五座电动观光车以当前仿真速度行驶在矩形凸块脉冲路面上对乘员健康不产生相关威胁。
3 结论
(1)基于ADAMS/View 模块建立五座电动观光车动力学模型,对该仿真模型进行随机输入和脉冲输入的平顺性分析,仿真分析结果说明了电动观光车具备较好的平顺性。可为后续电动观光车优化提供理论参考。
(2)在实际设计过程中考虑采用优化方法对悬架刚度及阻尼参数进行优化,从而使该型号的电动观光车得到更优秀的平顺性能。
(3)以实际车辆参数在ADAMS/View 模块中建立的电动车动力学模型,更贴合实际车辆行驶平顺性的情况,能够在一定程度上降低时间和经济成本,为该类型电动观光车企业在研究和改进产品过程中提供一定的技术支持。
