车载综合电力系统动态重构及其功率流控制*
2019-09-17廖自力李年裕
袁 东,廖自力,李年裕,王 刚
(1.陆军装甲兵学院兵器与控制系,北京 100072;2.陆军装甲兵学院演训中心,北京 100072)
0 引言
陆战平台综合电力系统是为满足地面战斗平台电驱动、电武器、电防护及其他多用电任务剖面需求,集大容量/ 大功率电能生产、存储、变换、分配、回馈及其综合管理控制于一体的车载电力集成系统[1]。为满足不同工作条件下各种特性的任务负载供电需求,车载综合电力系统必须具备多种工作模式,且能够快速、稳定、安全地在各种工作模式间进行转换;在故障情况下还需要切换到应急工作模式,实现安全保护与在线降级重构,提高系统的不间断供电能力[2-4]。系统工作模式转换过程往往涉及多个装置、部件协同动作与指令重置,且伴随高电压/大电流的功率流换流,协调控制难度大,同步要求精度高。因此,如何实现车载综合电力系统动态重构以及重构过程的同步协调控制,提高系统供电能力与负载适应性,并保证工作模式转换的实时性、可靠性和安全性,成为工程实践中的焦点问题。
1 车载综合电力系统结构与原理
某车载综合电力系统采用基于多驱动特性能量源的结构模式[1],由主能量源、辅助能量源、直流供电网络(其标称电压为750 V)、释能单元以及外部交流/直流电网接口等组成,结构如图1 所示。

图1 综合电力系统结构
主能量源为发动机-发电机组,发电机选用永磁同步电机,通过PWM 整流器与直流供电网络连接,系统具有起动与发电两种工作模式,当工作在起动模式时,PWM 整流器处于有源逆变状态,由直流网络供电,驱动永磁同步电机处于电动状态,带动发动机转动。当达到怠速以上转速时,永磁同步电机转换到发电状态,PWM 整流器变换成可控整流模式,向直流网络输出能量。
辅助能量源采用动力电池与超级电容复合储能结构,通过高压接触器K1 与直流供电网络相连。动力电池输出电压为670 V(当其SOC 为70%时),超级电容工作电压范围为0~900 V,二者通过与高压接触器K3,K4 或K2,K5 与双向DC/DC 变换器连接,也具有多种工作模式。如当超级电容电压低于动力电池电压时,高压接触器K3,K4 闭合,动力电池接入双向DC/DC 变换器高压侧,超级电容接入低压侧,DC/DC 工作在降压恒流状态时可为超级电容充电;当超级电容电压高于动力电池电压且低于直流供电网络电压时,闭合K2,K5,DC/DC 采用升压恒流工作状态,可继续为超级电容充电;当超级电容电压达到直流供电网络电压后,K1 闭合,动力电池通过DC/DC 与和超级电容并联可向直流供电网络供电,此时DC/DC 可采用升压恒压工作或升压恒流工作。当负载系统回馈能量时,DC/DC 切换到降压恒流工作状态,可为动力电池充电。
2 系统工作模式与动态重构方法
综上分析,图1 中的各装置、部件具有多种工作状态,通过组合重构,车载综合电力系统可衍生出适应不同应用环境的多种工作模式。
2.1 增强混合动力模式
该模式下,各能量源均参与工作,发动机- 发电机组提供战斗平台遂行任务所需的平均功率,辅助能量源可有效结合动力电池高能量密度和超级电容高功率密度的特点,提高系统负载适应能力。其工作流程为:
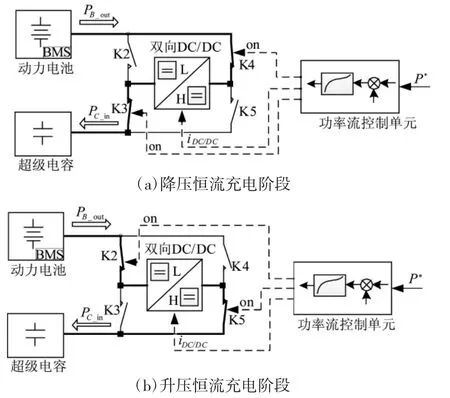
图2 系统上电预充结构图
1)系统上电预充。当接收到整车控制器高压上电指令时,功率流控制单元首先检测动力电池与超级电容电压,如超级电容初始电压低于动力电池,则控制系统进入降压恒流充电阶段,其工作原理如图2(a)所示。当超级电容电压达到动力电池后,切换到升压恒流充电阶段,其工作原理如图2(b)所示。如超级电容初始电压高于动力电池,则系统直接进入升压恒流充电阶段。超级电容预充结束后,向整车控制器上传预充完成状态信号。
2)发动机起动。当接收到发动机起动指令时,功率流控制单元在图2(b)所示状态的基础上,控制高压接触器K1、J1、J2 闭合,同时控制双向DC/DC变换器按升压恒压模式工作,输出电压可设定为直流供电网络标称电压,PWM 整流器按有源逆变模式工作,采用转速闭环控制或转矩闭环控制,其工作原理如图3 所示。
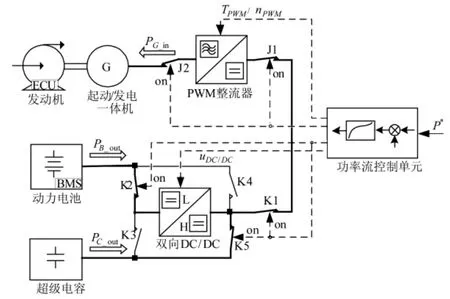
图3 复合储能起动发动机结构图
3)复合供电阶段。当发动机起动后,系统可根据指令和负载功率需求进行复合供电,此时各高压接触器开关状态与图3 相同,但各装置工作模式根据功率分配策略不同而有所区别。功率流控制单元根据负载需求功率P* 解算出各能量源分配功率,PWM 整流器切换到可控整流模式,采用电压闭环控制或转矩闭环控制,发动机采用转速闭环控制或油门开度闭环控制,共同调节发动机-发电机组输出功率。双向DC/DC 变换器工作在升压模式,采用电压闭环控制或电流闭环控制,调节动力电池输出功率,剩余需求功率由超级电容补充。
4)能量回收阶段。当任务负载处于能量再生状态(如车辆下坡、减速、制动等)时,车载综合电力系统需吸收回馈能量。此时功率流控制单元根据负载回馈功率大小解算出各能量源需吸收的功率,超级电容处于不可控模式,根据直流供电网络电压变化吸收回馈功率,双向DC/DC 变换器工作在降压模式,通常采用电流闭环控制调节动力电池吸收功率,PWM 整流器工作在有源逆变模式,可采用转矩闭环控制调节发动机吸收一定范围的回馈功率[5],当各能量源不足以完全吸收回馈功率时,可通过控制VT1 接入释能电阻,抑制电压泵升,其工作原理如图4 所示。
实际工作过程中复合供电与能量回收阶段并不是完全分开的,而是交替进行甚至复合在一起的。
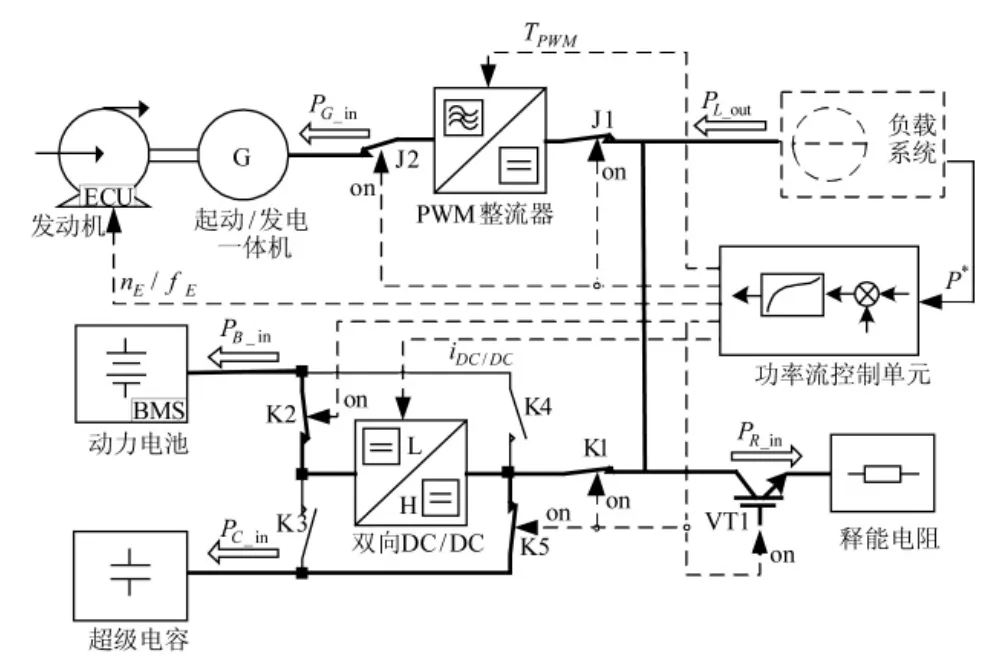
图4 多能量源复合供电结构图
5)系统断电阶段。一般有两种断电方式,一种是直接断电,另一种是超级电容放电后再断电,前者比较简单,功率流控制单元直接控制各装置停止工作,并断开所有高压接触器即可。当需要超级电容放电时,首先控制各装置停止工作,然后接通高压接触器K5、K1 与电力电子开关VT1,超级电容通过释能电阻放电,放电结束后再断开各接触器。
2.2 增强静默供电模式
为了达成任务的隐蔽性和突然性,在特殊作战条件下可关闭发动机,采用复合储能系统实现静默供电,从而降低自身的噪声以及红外特性。其工作流程包括系统上电预充、复合供电、能量回收和系统断电等阶段。
系统上电预充阶段的工作原理和功率流关系与增强混合动力模式相同;预充结束后没有起动发动机阶段,可根据指令直接进入复合供电阶段,其工作原理如图5 所示。此时功率流控制单元控制高压接触器K2、K5、K1 闭合,双向DC/DC 变换器工作在升压模式,采用电压闭环控制或电流闭环控制。系统断电过程亦与增强混合动力模式相同。
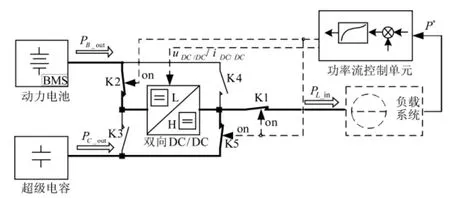
图5 静默复合供电结构图
2.3 简易混合动力模式
简易混合动力模式下,超级电容不参与供电,辅助能量源为单一动力电池。这种供电模式无法利用超级电容高功率密度特点,系统负载适应能力降低,但是上电阶段无需为超级电容预充,系统准备时间较短,可用于紧急情况下的应急机动,同时也可用于双向DC/DC 变换器损坏时的降级工作。其工作流程包括发动机起动、复合供电、能量回收和系统断电等阶段。
系统上电无超级电容预充过程,直接根据指令进入发动机起动阶段,工作原理如图6 所示。动力电池通过高压接触器K4、K1、J1、J2 接入PWM 整流器,起动/发电一体机可采用转速控制或转矩控制,此时直流供电网络电压为动力电池电压(一般低于增强混合动力模式下的直流供电网络标称电压)。

图6 动力电池起动发动机结构图
复合供电阶段各高压接触器开关状态与图6相同,发动机与PWM 整流器控制模式与增强混合动力模式相同,但分配功率与输出电压有所区别。同时动力电池提供和吸收的能量大小不能通过DC/DC 变换器进行控制,而是由直流供电网络电压波动情况决定。系统断电时功率流控制单元直接控制各装置停止工作,断开所有高压接触器即可。
2.4 简易静默供电模式
简易静默供电模式下只有动力电池作为单一能源供电,其控制较简单。需要供电时接通高压接触器K4、K1,断电时切断K4、K1。其工作过程的输出与回馈功率大小也不能通过DC/DC 变换器调节,直接由负载工作特性决定。
2.5 应急供电模式
应急供电模式是系统在部分装置故障情况下进行降级重构,实现应急供电的工作模式。根据系统的故障情况不同,其应急供电的工作原理与系统结构也有所区别。如在增强混合动力模式下超级电容出现漏电故障,功率控制单元可调整各装置的工作模式与控制参数,将其切换到简易混合动力模式,再如增强混合动力模式下PWM 整流器故障时,可将其切换到增强静默供电模式,即前述各种工作模式之间本身就具有一定的降级重构能力。
为了界定方便,本文中的应急供电模式主要指除前述工作模式之外的供电结构,以增强混合动力模式下动力电池出现漏电故障或DC/DC 变换器故障为例,此时系统可切断动力电池供电回路,利用发动机-发电机组与超级电容进行复合供电,同时功率控制单元根据需求功率P*动态解算调整发动机与PWM 整流器控制参数。
2.6 充电维护模式
传统装甲车辆车载电池需要定期或不定期地从车辆上拆卸下来,送到充电间充电维护。对于车载综合电力系统来说,为满足电压等级、功率与容量等要求,动力电池的体积和重量较大,拆装困难,因此,一般考虑原位充电维护方式。为提高系统兼容性,图1 所示车载综合电力系统具有车载发动机充电、外部交流电网充电与外部直流电网充电等3种原位充电维护方式。以车载发动机充电为例,如图7 所示。功率流控制单元控制高压接触器K1、K2、J1、J2 闭合,同时根据充电需求功率按照发动机输出特性曲线调节发动机转速,并协同控制PWM整流器与双向DC/DC 变换器实现充电控制。当发电机输出等效直流电压高于动力电池电压时,PWM 整流器采用不控整流方式,双向DC/DC 变换器采用降压电流闭环控制方式进行充电;当发电机输出等效直流电压低于动力电池电压时,PWM 整流器采用电流闭环控制的可控整流方式,双向DC/DC 变换器采用不控方式进行充电;这样一来,PWM 整流器与双向DC/DC 变换器二者之间只有一个功率变换装置进行充电电流控制,其控制方式较为简单,同时功率变换装置的开关损耗可有效降低。
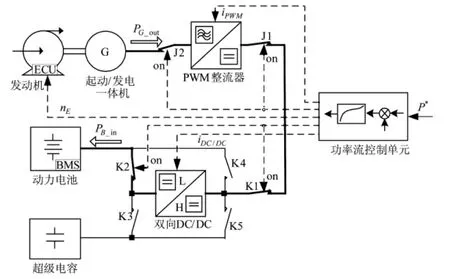
图7 车载发动机充电结构图
3 基于状态机的系统模式转换与功率流控制
前述分析可知,车载综合电力系统具有多种工作模式,各工作模式内部又存在多个工作阶段。在系统运行过程中需要经常在各模式、各阶段间进行转换,且转换过程需要满足同步性、供电平稳性和可靠性等要求,同时还需满足装置自身特性约束[6]。考虑到前面构建的工作模式与工作模式内部的各工作阶段形成了层次化的嵌套关系,本文采用层次式有限状态机模型[7-9],将工作模式作为父状态,工作模式内部的各工作阶段作为父状态下的子状态。由此可得系统状态机模型的父状态与子状态集如表1 所示。为了控制方便,表中增设了待机模式。

表1 系统的父状态与子状态集
下面来分析基于层次状态机的功率流动态重构控制,首先构建父层状态的转换轨迹如图8 所示。
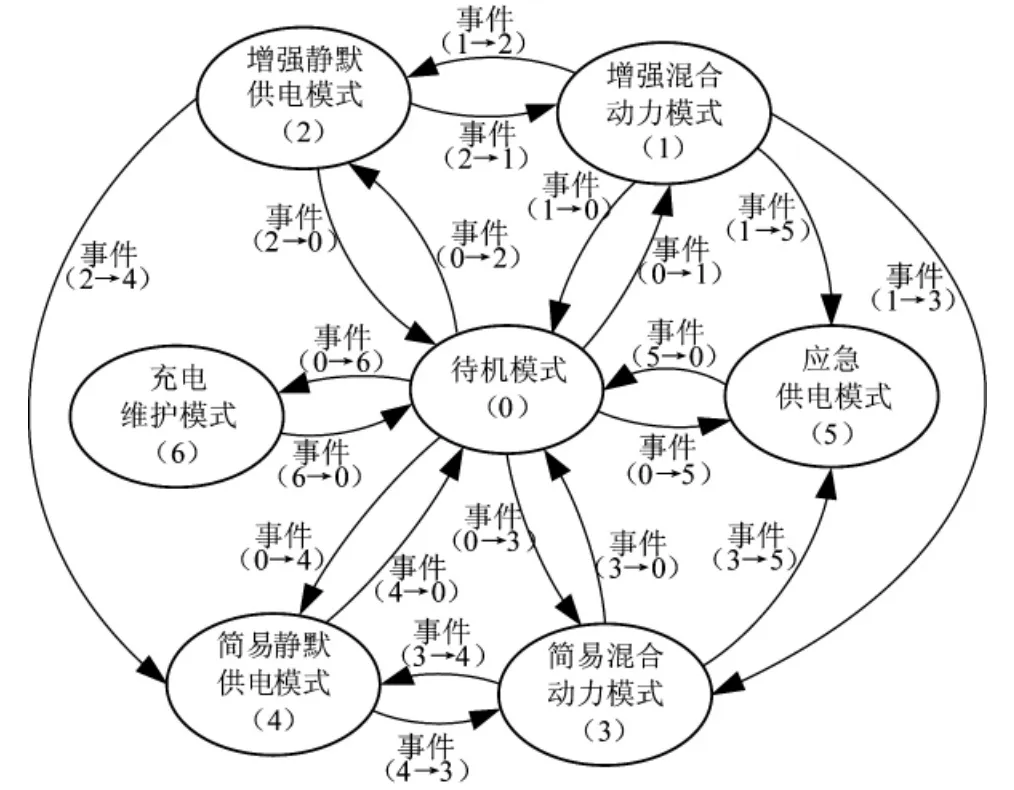
图8 系统父层状态转换图
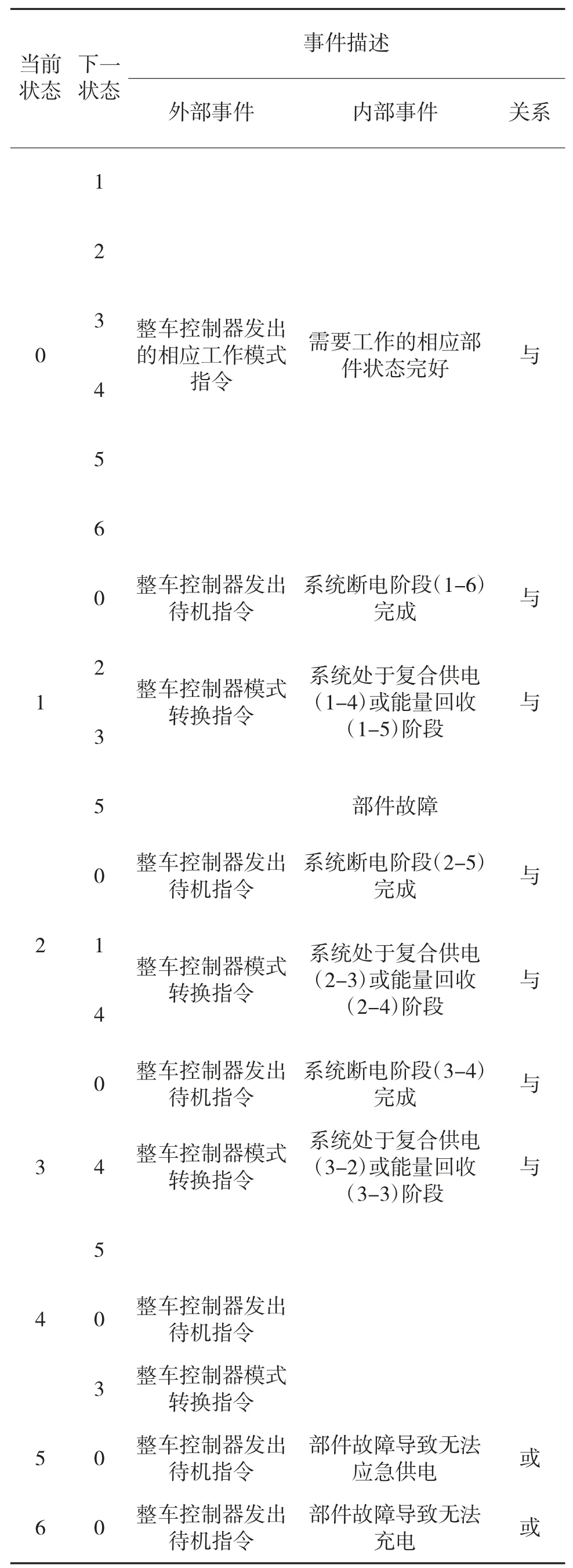
表2 父层状态转换的事件集
图8 中,多数工作模式之间可进行双向转换,但考虑到超级电容存在自放电现象,增强静默供电模式与简易静默供电模式之间,增强混合动力模式与简易混合动力模式之间只能进行单向转换。同时,考虑到系统工作可靠性,增强混合动力模式、简易混合动力模式与应急供电模式之间也只能进行单向转换。另需说明的是,简易静默供电模式时只有动力电池作为单一能源供电,当其出现故障时无降级使用能力,因此,不能切换到应急供电模式。各父层状态转换的事件如表2 所示。
表2 中,状态转换事件由外部事件和内部事件组成,系统工作模式转换主要由外部事件(整车控制器的相应指令)驱动,同时需满足内部状态要求,如为了保证系统工作安全性,工作模式转换大多要求系统在处于复合供电或能量回收阶段时进行,预充阶段、发动机起动阶段和断电阶段一般不响应模式转换指令。接下来分析子状态的转换轨迹。限于篇幅,此处以增强混合动力模式下的子状态为例,其转换轨迹如图9 所示。各子状态转换的事件如表3 所示。

图9 增强混合动力模式子状态转换图
为了满足切换过程中装置本身约束要求和供电平稳性要求,子状态中设置预置过渡态。当其他工作模式切换到增强混合动力模式时,首先进入预置过渡态,进行相应的功率流预先转移控制。
4 结论
为了验证本文所述的动态重构及其功率流控制方法的有效性,研制了基于DSP+FPGA 的功率流控制单元,将其应用于某车载综合电力系统并进行了装车试验,下页图10 为增强混合动力模式工作过程中,系统部分工作阶段转换过程的状态变量。

表3 子状态转换的事件集
图10 中,系统初始状态为待机模式,时刻转换至降压恒流预充阶段(为了保证安全性,实际系统采用两阶段降压恒流充电法),超级电容电压迅速上升,动力电池与超级电容之间的电压差逐渐减小,充电电流随之减小。时刻切换至升压恒流预充阶段,超级电容电压继续升高,达到直流供电网络电压后预充结束。时刻接收到发动机起动指令后动力电池与超级电容向其供电,直到起动完成。各状态切换时刻电流均接近零,切换平稳无冲击。
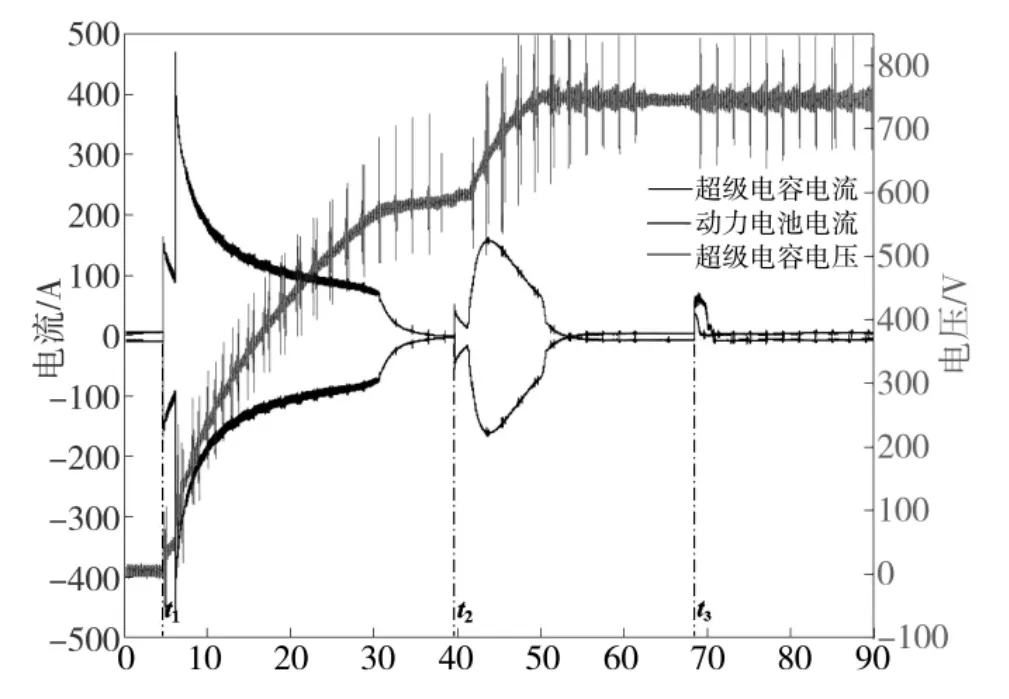
图10 系统部分工作阶段转换过程的状态变量
试验结果表明,系统模式转换灵活,冗余度高,动态重构能力强,负载适应性好,工作稳定可靠,为高适应性车载综合电力系统研究提供参考。
