快速形状上下文算法在道岔控制电路故障诊断中的应用
2019-09-11肖金山夏荣斌孔令刚
肖金山,夏荣斌,孔令刚
快速形状上下文算法在道岔控制电路故障诊断中的应用
肖金山,夏荣斌,孔令刚
(兰州交通大学 常州研究院,江苏 常州 213000)
针对道岔控制电路故障诊断方法相对落后这一问题,将理论研究和实物研发相结合,设计一种基于快速形状上下文算法的道岔控制电路故障诊断系统。系统通过子模块上传的电流数据作为支撑,对微机监测系统中S700K转辙机正常电流和8条典型异常电流曲线使用二维数组的方式存储形成数据库,使用X分布计算待匹配曲线与数据库曲线的匹配代价。根据该值的大小判断道岔控制电路的工作状态,实现道岔控制电路故障智能诊断。经实例分析和系统测试,该方法可以有效地运用于道岔控制电路故障智能识别中,具有一定的实用价值。
道岔控制电路;快速形状上下文;故障诊断;S700K转辙机;数据库

铁路信号设备中道岔控制电路的故障多发且隐蔽性强,是困扰铁路安全发展的主要原因。目前,对于道岔控制电路故障研究主要集中于理论研究和实物研发2个方面。理论方面比较典型的有张钉等[1]结合小波变换与神经网络方法分析S700K转辙机故障原因;程宇佳[2]采用核方法对转辙机动作电流曲线进行故障分析;肖蒙等[3]提出基于贝叶斯网络的道岔控制电路故障诊断方法;赵林海等[4]将灰关联算法应用于道岔控制电路故障诊断中。以上关于理论的研究多采用仿真软件构建模型进行故障分析,更注重算法的应用研究,没有将其应用于实际故障诊断的先例。相比理论研究,实物研发相对滞后,应用较为广泛的有电动转辙机综合参数测试台和微机监测。其中,电动转辙机综合测试台主要用于转辙机大修后对其性能参数进行集中检测。由于可对转辙机进行拆卸,测试具有全面准确的优点,但因其体积较大和操作复杂,无法在实际现场应用。目前,通过分析微机监测曲线对道岔控制电路工作状态进行诊断是我国最常用的故障识别方法,因需人工分析监测数据,对电务人员业务水平要求较高,无法满足铁路行车安全需求。形状匹配是模式识别中的基本问题,也是难点问题。近年来,以形状上下文为代表的基于轮廓点空间位置的形状匹配算法得到了长足发展,是近10年最为重要的形状描述方法[5]。与传统形状匹配方法如矩、傅里叶描述子和小波描述子等考虑物体全局特征相比,形状上下文算法将物体整体信息和局部形状紧密结合,取得了令人满意的效果。本文针对道岔控制电路故障诊断理论研究和实物研发脱节的现象,对形状上下文算法进行改进,提出一种将快速形状上下文算法应用于道岔控制电路故障诊断的方法。经实际测试与验证,该方法能实现道岔控制电路故障智能诊断且具有较高的故障识别率。
1 道岔控制电路故障诊断系统
道岔控制电路故障诊断系统设计有主机模块(此模块通过分析子模块上传的电流曲线数据对道岔控制电路工作性能进行判断)和交/直流转辙机在线监测(此模块在线监测动作中的转辙机并采集电流曲线数据)、交/直流转辙机离线驱动(此模块代替室内道岔控制电路对室外转辙机进行控制,形成完整的道岔控制电路,通过采集电流数据为智能分析室外转辙机可能存在的故障提供条件)、虚拟交/直流转辙机(通过室内道岔控制电路对配置了此模块的诊断系统进行控制,可模拟完整的道岔控制电路,通过采集电流数据为智能分析室内道岔控制电路故障提供条件)六大子模块。将功能不同的子模块插入含有主机模块的母板箱实现一种适合于任何道岔控制电路的智能诊断系统。系统总体框架如图1所示。
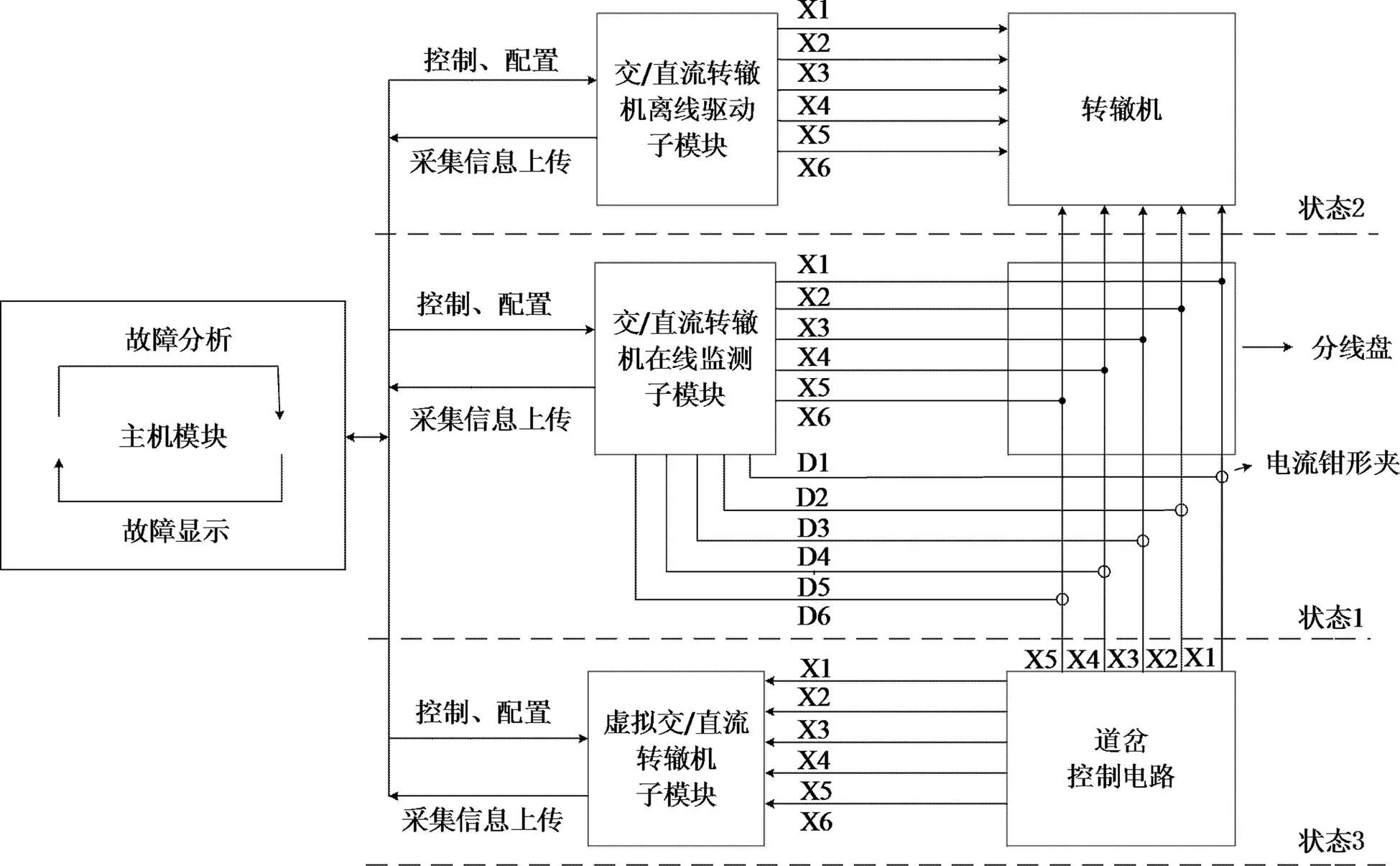
图1 道岔控制电路故障诊断系统结构框图
注[6]:1) 对于不同的道岔控制电路,X1-X6接通个数不同。交流道岔接通X1-X5;直流四线制道岔接通X1-X4;直流六线制道岔接通X1-X6。图1接通的是交流道岔。
2) 交/直流在线监测子模块通过外接电流钳形夹检测电流。交流道岔接通D1-D5;直流四线制道岔接通D1-D4;直流六线制道岔接通D1-D6。图1接通的是交流道岔。交/直流转辙机离线驱动和虚拟交/直流转辙机子模块通过内部集成霍尔传感原理的电流检测电路采集电流。
3) 使用时,同一系统配置相同的子模块,即状态1,2和3在同一时间只能存在于某一状态。
2 形状上下文算法
2.1 传统形状上下文
形状上下文算法是由Jitendra Malik,Serge Belongie和Jan Puzicha提出的一种物体轮廓描述算法[7-8]。该算法从总体上考虑物体特性,利用物体轮廓点之间的相对关系,结合统计学理论来实现物体形状匹配。因算法能够很好地描述物体的图样信息,已应用于地图匹配、医学图像识别、人脸识别和目标识别等领域。


式中:#代表集合的势;表示剩余的边界样本点;为坐标系的栅格,由所有栅格分布情况作为p的特征。图2为某离散点集以p为圆心形成的形状上下文描述子的空间分布情况。
以图2点集中p形状上下文描述子的空间分布情况为依据,对60个栅格内采样点的分布情况进行统计,形成图3所示的点p的形状上下文特征。其中直方图方块区域颜色越深表示落入该区域点的数量越多(经统计栅格中点数最多为3,最少为0,需4种颜色即可对点数进行表示)。
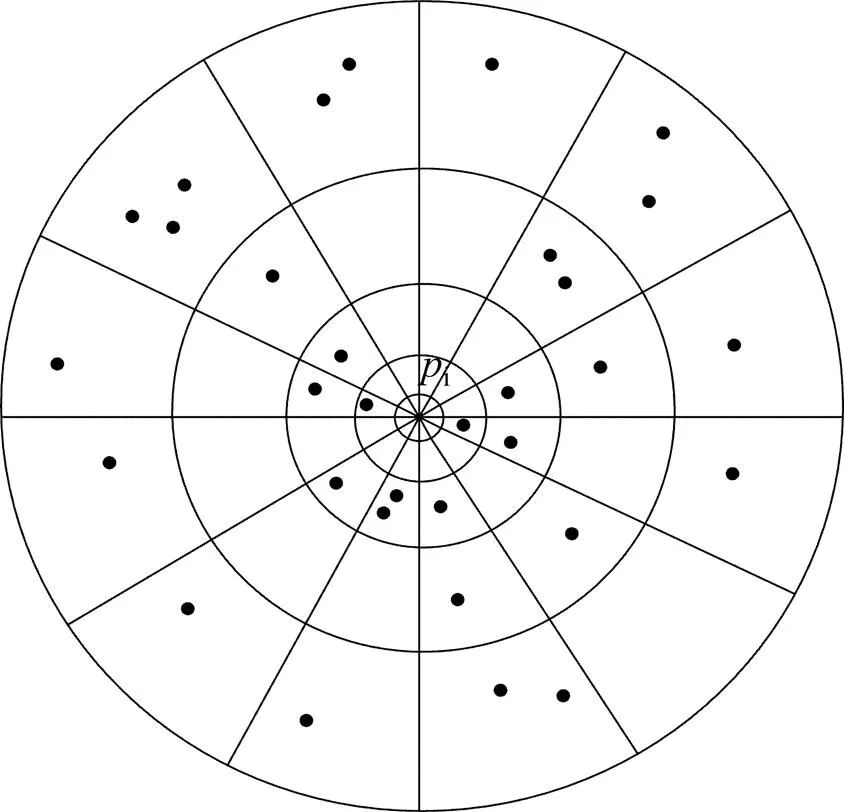
图2 pi形状上下文描述子的空间分布图
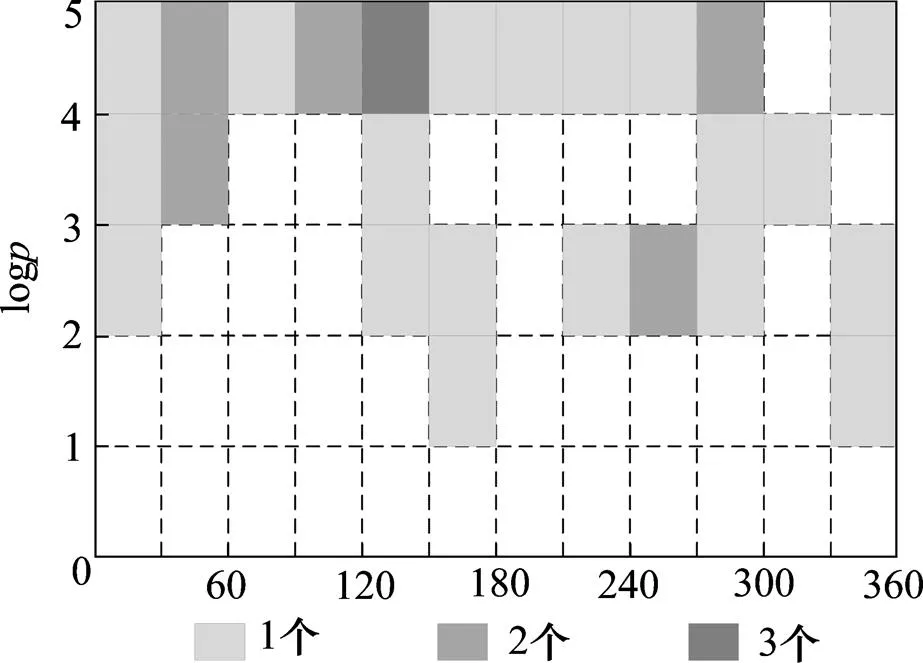
图3 点pi的形状上下文特征图
为了满足物体的缩放和平移不变性,对于样本点数为的图像,通过选取每个样本点作为圆点统计其他样本点的相对位置关系,可得到每个参考点都对应于60个不同栅格的形状上下文特征,从而得到个不同的直方图。将个不同的直方图称为该物体的形状上下文。
假设p和q分别为2个不同物体上的采样点,为了判断它们之间的匹配程度,使用2分布进行比对,匹配代价函数为:
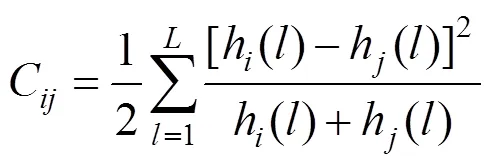
其中:为栅格个数;h()和h()分别表示样本点p和q所对应的形状上下文;C则为样本点p和q的匹配代价,即2个样本点的差异。C越大,说明样本点p和q的匹配代价越大,2个样本点相似度越低。C越小,表示样本点p和q的匹配代价越小,相应的说明2个样本点相似度越高。
对于2个待匹配的形状和形状,形状本身之间的上下文匹配代价函数为:
为了计算不同形状之间的相似程度,只需计算代价函数()的最小值。()最小代表匹配代价越小,相应地说明相似程度越高。
2.2 形状上下文算法的改进
为了将该算法和微系统结合并合理应用于道岔控制电路故障研究,对传统形状上下文算法从以下几个方面进行改进,将其命名为快速形状上下文算法。
1) 传统形状上下文算法为了保持物体缩放和平移不变性,对采集到的物体轮廓点集需一一求取对应的直方图,使得算法运行时间较长,和微处理器结合存在难度。考虑到道岔电流曲线数据是时间的函数,将其进行缩放和平移将使曲线数据失去固有属性。基于以上矛盾,本文从电流曲线数据中选取关键点求其直方图,作为物体的形状上下文特征(当轮廓点较多时,该方法能很好的保持曲线固有属性)。
2) 传统形状上下文通过轮廓点直方图的形式对落入不同区域的点集进行统计,当区域点数过多时,传统形状上下文算法需使用较多的颜色,无法将其定量化,使算法失去意义。为了解决传统形状上下文这一问题,本文提出利用二维数组对轮廓点形状上下文特征进行存储。
3) 电流曲线数据是时间的函数,点的上下文描述子的空间分布情况只需坐标第1象限就能实现,和传统形状上下文使用4象限相比,缩减了计算复杂度。
3 快速形状上下文在道岔控制电路故障诊断中的应用
结合研究内容,道岔动作电流数据的采样由系统子模块采集电流曲线上传于主机模块得到,不需利用其他方法对轮廓边缘进行采样,这将为快速形状上下文算法准确运用于道岔控制电路故障诊断提供基础匹配条件。
道岔动作电流曲线数据能够有效地表示道岔控制电路的工作状态,如何利用电流数据对道岔控制电路工作状态进行分析,是故障智能诊断能否实现的关键。本文以不同类型的转辙机动作时子模块上传的电流数据作为依据,分别存储形成不同类型转辙机数据库,待测曲线利用快速形状上下文算法与相应数据库曲线进行匹配,完成对道岔控制电路工作性能的判断。道岔控制电路包括直流四线制、六线制和交流五线制,且不同线制又存在不同的转辙机类型,导致电流曲线数据各不相同。因涉及情况较多,以交流S700K转辙机正常转换曲线和8条异常曲线[11−12]为例对快速形状上下文在道岔控制电路故障诊断中的应用进行介绍。
3.1 正常动作电流曲线分析
S700K正常动作电流曲线如图4所示。为了方便存储和匹配,正常动作电流曲线编码为1。
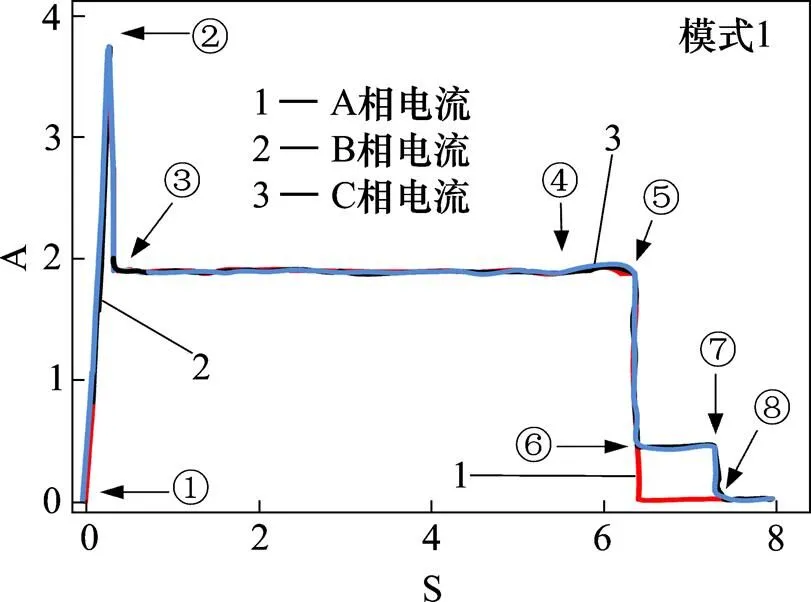
图4 S700K正常动作电流曲线图
对S700K转辙机正常动作电流曲线按以下步骤进行分析。
步骤1:启动继电器(1DQJ)吸起,开始记录道岔动作电流曲线(图4中①位置表示曲线记录开始)。
步骤2:启动继电器(2DQJ)转极,产生瞬间大电流(图4中①→②过程),使动作电流曲线出现一个较大峰值(图4中②位置),此电流称为启动电流,表示道岔动作条件已经具备。
步骤3:道岔解锁、转换和锁闭。解锁过程为②→③,转换过程为③→④,以斥离尖轨开始动作作为解锁和转换的分界点。④→⑤为锁闭过程,锁闭时的电流大小与转换时相比,没有明显增大,较平稳。
步骤4:启动电路断开。道岔转换完成后,切断启动电路,1DQJ自闭电路进入缓放状态(《维规》中规定,JWJXC−H125/80型继电器在24V条件下失磁时,缓放时间不小于0.5 s)。⑥→⑦→⑧即为1DQJ自闭电路断开后的缓放过程,其中A相电流直接回0,B相和C相电流经过0.8 s回0,说明室外表示电路通道正常。B相和C相缓放过程根据其曲线形象简称为“小尾巴”。
步骤5:1DQJ落下。1DQJ缓放落下后,电流曲线值持续为0。
3.2 异常动作电流曲线分析
通过分析正常动作电流曲线可知,道岔转换过程包含多个环节,熟练理解和掌握正常动作电流曲线形成原理是分析异常动作电流曲线故障的关键。本文以微机监测资料作为原始数据,归纳总结形成如表1所示的S700K故障模式数据库,各模式对应的动作电流曲线如图5所示。
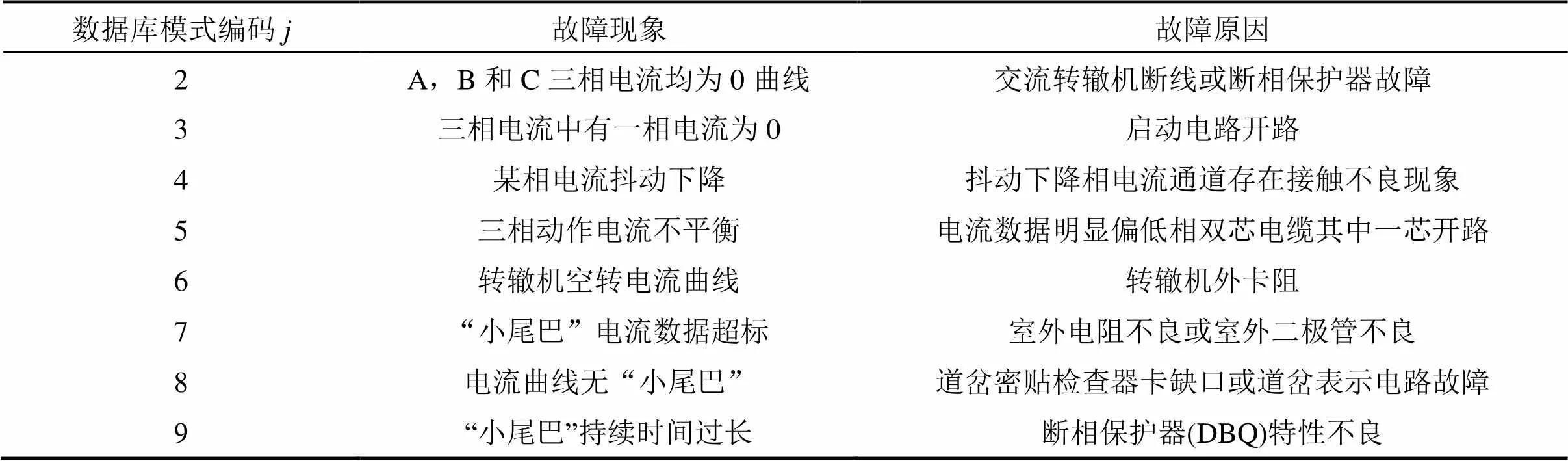
表1 S700K故障模式数据库
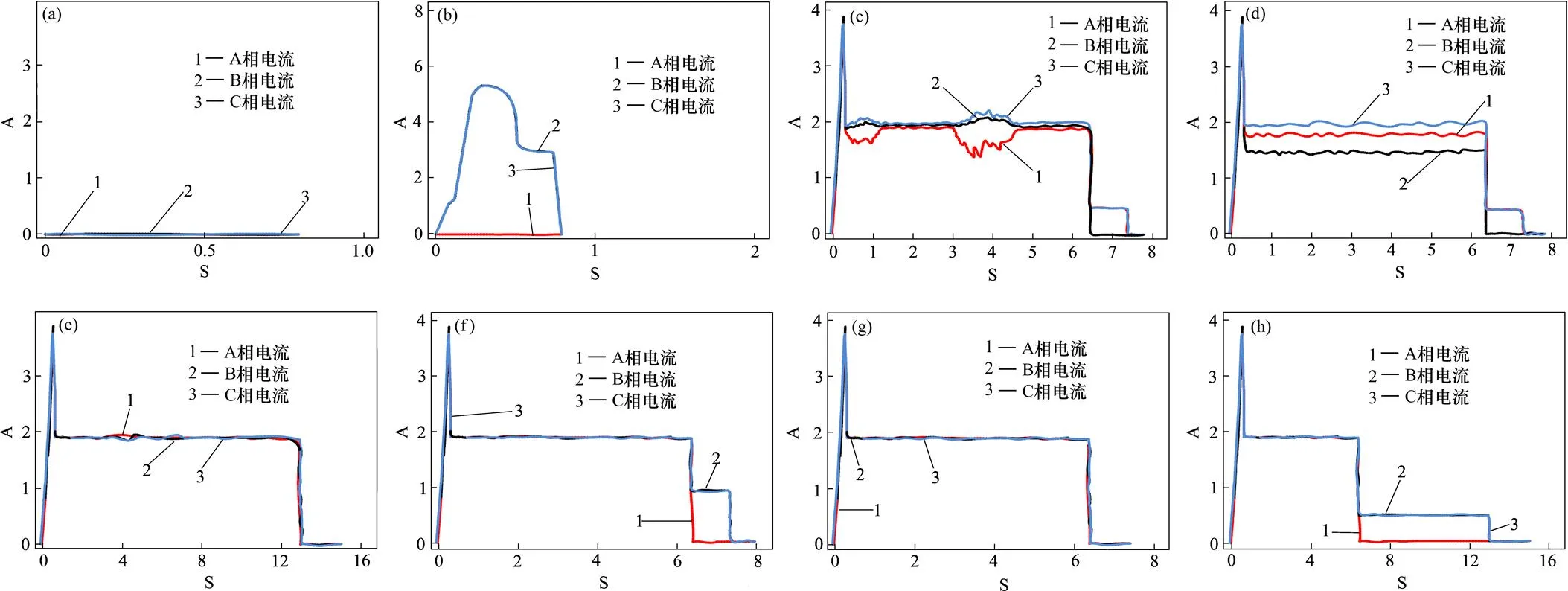
(a) 模式2;(b) 模式3;(c) 模式4;(d)模式5;(e) 模式6;(f) 模式7;(g) 模式8;(h) 模式9
3.3 快速形状上下文算法具体应用
道岔控制电路故障诊断系统中,各子模块对电流的采样周期为20 ms且电流曲线保护时间为13 s。因此,对一次道岔转换过程,每相电流采集700个点数据(共2 100个点),即能保证在任何状态下都能得到完整的电流数据。与文献[11]对每条曲线提取15个特征点形成20个故障特征相比,该算法保留了曲线所有点数据特征,将最大限度地提高故障识别率和准确度。为了对采集的点数据进行存储,以横坐标表示曲线的动作时间,纵坐标表示电流实际值的大小,对坐标第1象限进行栅格划分(横坐标以1 s为单位,纵坐标以0.5 A为单位,划分为15个部分,第1象限以10度为单位平均划分为9份),形成135个栅格并对不同栅格区域进行编码。
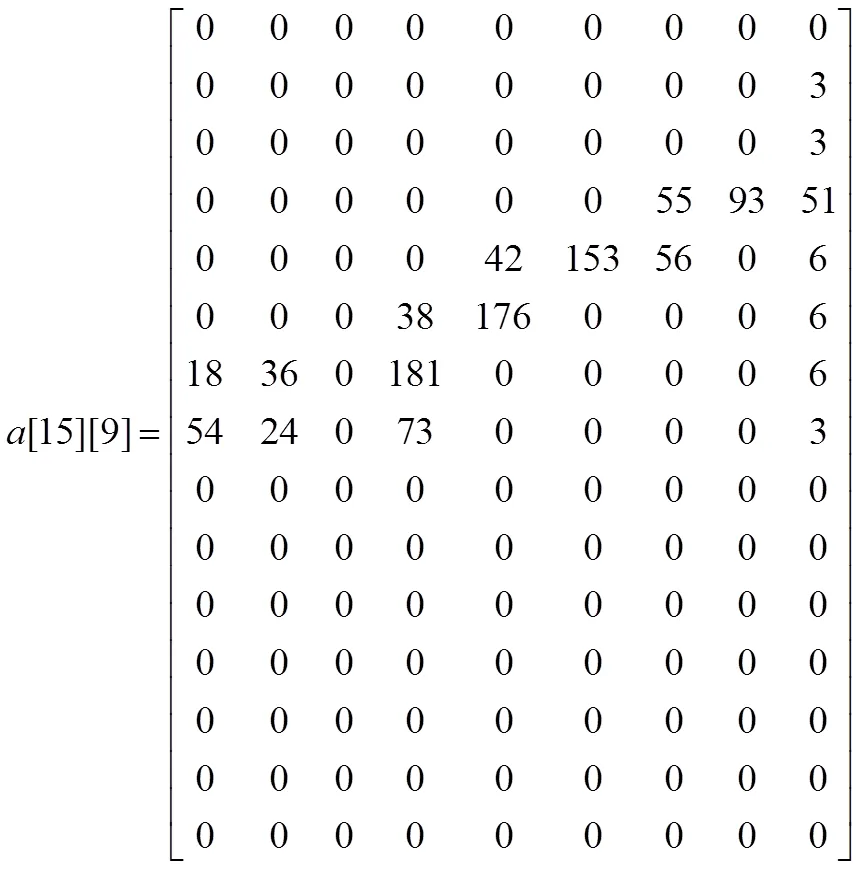
由存储结构划分可知,定义一个15行9列的二维数组即可存储一个完整的电流曲线数据。把实际电流值按落入不同栅格的个数情况进行统计,作为道岔控制电路不同故障特有属性。另外,为了防止电流数据初始零值持续时间过长,出现曲线整体移位影响匹配准确程度,以电流曲线数据中出现第1个不为零值的前一零值为基准点(即关键点),求其上下文描述子,作为相应电流曲线的形状上下文。S700K正常转换时数据栅格分布情况如图6所示。
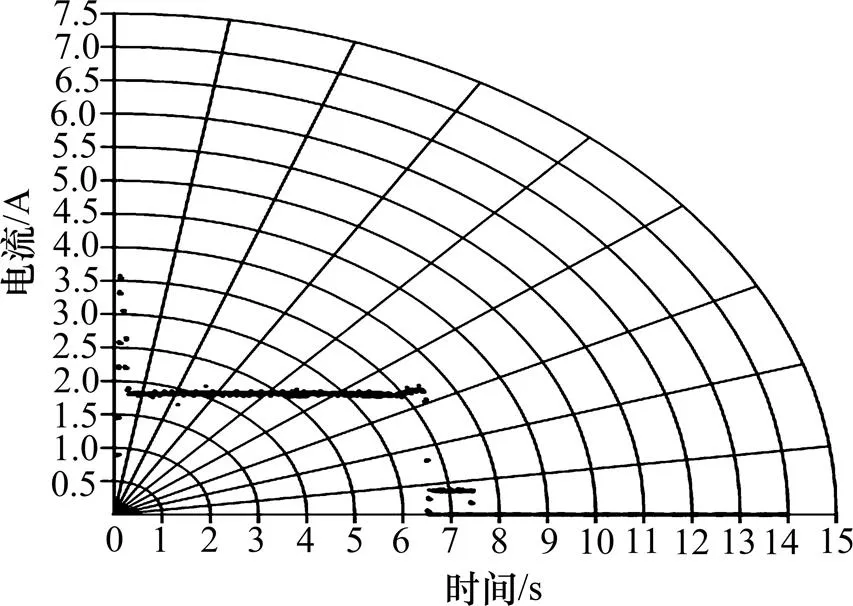
图6 S700K转辙机正常转换时电流数据栅格图
为了存储S700K正常转换时三相电流数据在坐标栅格中的分布情况,特定义二维数组[15][9],[15][9]的值为:
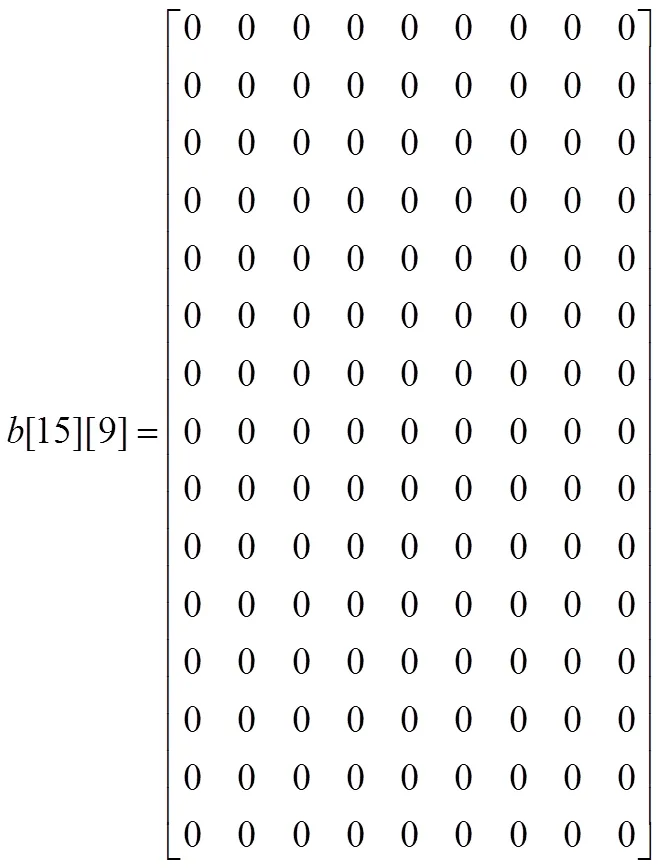
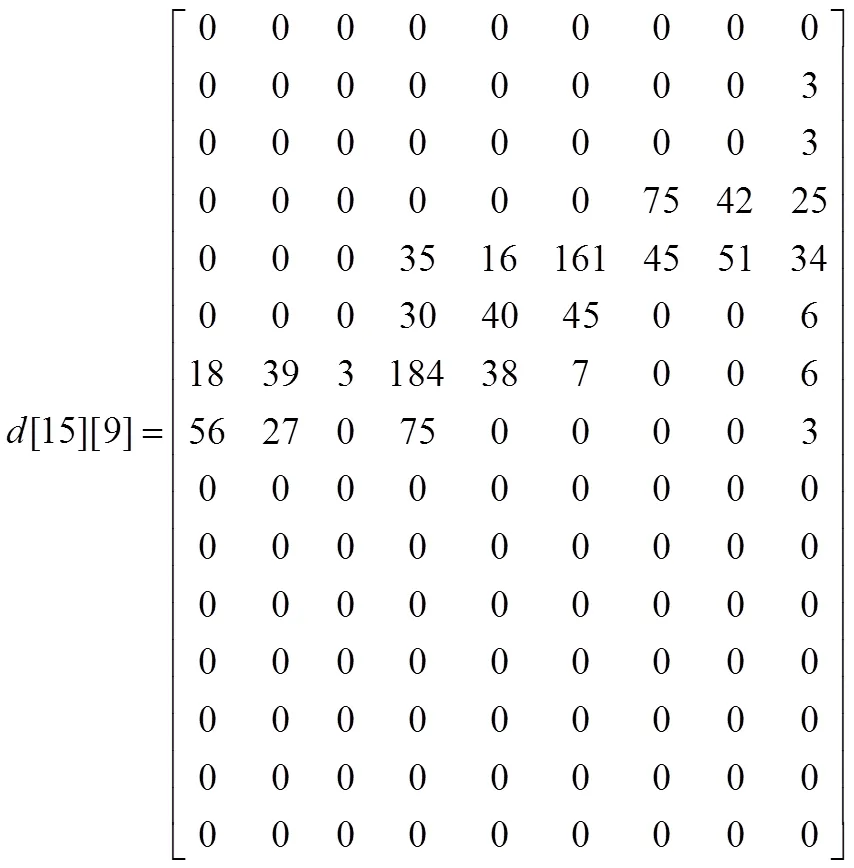
以同种方式对S700K转辙机8条异常电流曲线数据进行存储形成数据库,对应的二维存储数组如下所示。
1) 三相电流数据均为0存储数组[15][9]
2) 某相电流数据为0存储数组[15][9]
3) 某相电流数据抖动下降存储数组[15][9]
4) 三相动作电流数据不平衡存储数组[15][9]
5) 转辙机空转电流数据存储数组[15][9]
6) “小尾巴”电流数据超标存储数组[15][9]
7) 电流数据无“小尾巴”存储数组[15][9]
8) “小尾巴”电流数据持续过长存储数组[15][9]
当有待匹配的S700K转辙机动作电流数据上传时,按坐标栅格结构进行数组存储。然后利用式(2)计算该曲线与数据库曲线的匹配程度。匹配代价函数如下所示:

3.4 道岔控制电路故障诊断实例分析
为了验证快速形状上下文算法的可行性,对其进行相应实例分析。具体地,以某铁路公司电务段S700K转辙机转换时,道岔尖轨和基本轨之间夹有异物造成转辙机空转的情况进行分析验证。
S700K转辙机在尖轨和基本轨之间夹有异物动作时,道岔控制电路故障诊断系统接收到的电流数据用[15][9]数组表示如下。
将该电流数组与数据库曲线进行比对,求取匹配程度C。匹配结果如表2和图7所示。

表2 待测电流数据与数据库数据匹配表
结果表明,数据库编码=6时匹配代价最小,此时C为3.833,满足门限要求,应输出相应匹配结果。=6表示转辙机外卡阻,即道岔尖轨和基本轨间夹有异物,与现场检修结果一致。
为了更加准确地测试快速形状上下文算法的故障诊断性能,从微机监测系统各获取若干条ZD6,S700K和ZYJ7转辙机动作电流曲线作为待测样本,按本文方法进行道岔控制电路故障智能诊断,计算结果如表3所示。

图7 待测电流数据与数据库数据匹配图

表3 各型号转辙机故障识别
结果表明,使用快速形状上下文算法对道岔控制电路进行诊断具有较高的故障识别率且保证了故障识别的准确性,验证了该改进算法在道岔控制电路故障诊断中的可行性。
4 系统测试
当所有设计功能完成后,实现道岔控制电路故障诊断系统样机,实际验证算法智能诊断效果。系统主机采用北京大器智成技术有限公司编号为GLM-70W-CB的可编程智能LCD。各子模块采用Atmel公司AT90CAN128芯片作为微处理器,并设置有电流检测、继电器控制和道岔驱动采集等关键电路。其中子模块硬件电路的设计及PCB板的绘制通过Altium Designer 6.9实现,程序的编写通过ICCV7 for AVR软件完成。子模块通过RS485上传电流数据实现主从机通信,使主机模块完成电流数据智能诊断的功能。系统样机如图8所示。
图9为道岔尖轨和基本轨之间夹有异物造成转辙机空转时,道岔控制电路故障诊断系统主机显示下的电流曲线页面,故障分析结果显示:“转辙机外卡阻,请检查轨道内是否有杂物。”该测试与人工检修结果一致,满足实际功能需求。

图8 道岔控制电路故障诊断系统样机
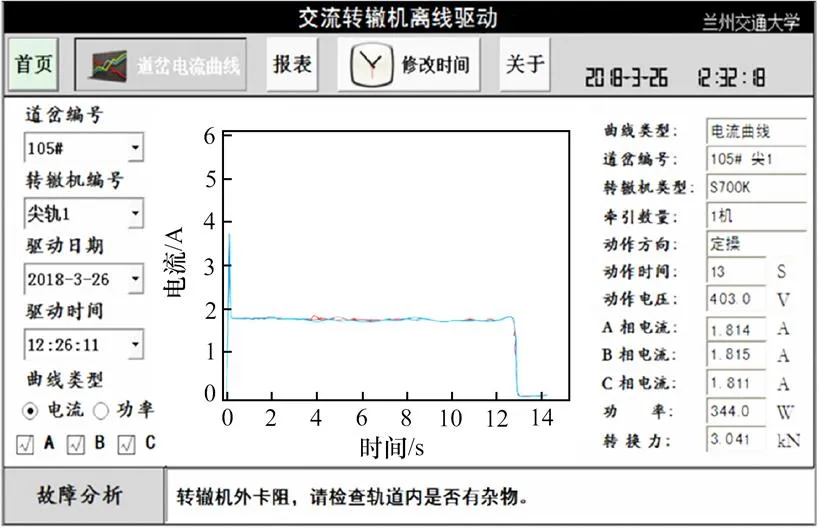
图9 转辙机外卡阻电流曲线界面图
5 结论
1) 针对道岔控制电路故障诊断理论和实物脱节的现象,引入形状上下文算法设计故障诊断系统。考虑到电流曲线是时间的函数,对其缩放、平移将使曲线失去固有属性,对传统算法进行改进,提出快速形状上下文算法,并使用二维数组对S700K转辙机正常和8条异常电流曲线存储形成数据库。
2) 采用X分布对S700K待匹配曲线与数据库曲线匹配分析。为了防止拒匹配和误匹配的发生,设置匹配代价门限值30。通过分析道岔尖轨和基本轨间夹有异物的故障情况表明,将该算法应用于故障诊断存在可行性。另外,为了准确测试该方法的故障识别性能,重新获取ZD6,S700K和ZYJ7转辙机动作电流曲线进行样本诊断。结果表明,故障识别率达到98%以上,保证了故障识别的准确性,
3) 实现故障诊断系统样机,实际验证算法的智能诊断效果。测试结果显示,使用快速形状上下文算法的故障诊断系统与人工检修结果一致,实现了故障智能诊断的效果。经后续进一步完善,可将其应用于铁路信号工程调试和开通过程中,也可应用于铁路电务系统的日常维护,具有一定的实用价值。
[1] 张钉, 李国宁. 基于改进WNN分析功率曲线的S700K转辙机故障诊断[J]. 铁道科学与工程学报, 2018, 15(8): 2123−2130. ZHANG Ding, LI Guoning. Fault diagnosis of S700K switch machine based on improved WNN analysis power curve[J]. Journal of Railway Science and Engineering, 2018, 15(8): 2123−2130.
[2] 程宇佳. 基于核方法的高速铁路道岔故障诊断[D]. 北京: 北京交通大学, 2016. CHENG Yujia. High-speed railway switch fault diagnosis based on kernel methods[D]. Beijing: Beijing Jiaotong University, 2016.
[3] 肖蒙, 翟琛, 潘翠亮. 基于快速贝叶斯网络的S700K转辙机故障诊断研究[J]. 铁道科学与工程学报, 2015, 12(2): 414−418. XIAO Meng, ZHAI Chen, PAN Cuiliang. Research on S700K switch machine fault diagnosis based on fast bayesian network[J]. Journal of Railway Science and Engineering, 2015, 12(2): 414−418.
[4] 赵林海, 陆桥. 基于灰关联的道岔故障诊断方法[J].铁道学报, 2014, 36(2): 69−74. ZHAO Linhai, LU Qiao. Method of turnout fault diagnosis based on grey correlation analysis[J]. Journal of the China Railway Society, 2014, 36(2): 69−74.
[5] 周瑜, 刘俊涛, 白翔. 形状匹配方法研究与展望[J]. 自动化学报, 2012, 38(6): 889−910. ZHOU Yu, LIU Juntao, BAI Xiang. Research and perspective on shape matching[J]. Acta Automatica Sinica, 2012, 38(6): 889−910.
[6] 肖金山, 何涛, 曹德瑾, 等. 基于PS-LCD开发的道岔控制电路智能分析仪[J]. 仪表技术与传感器, 2018(4): 40−45. XIAO Jinshan, HE Tao, CAO Dejin, et al. Intelligent analyzer for switching control circuit based on PS-LCD[J]. Instrument Technology and Sensor, 2018(4): 40−45.
[7] 赵键. 点模式匹配算法研究[D]. 长沙: 国防科学技术大学, 2012. ZHAO Jian. The research on point pattern matching[D]. Changsha: National University of Defense Technology, 2012.
[8] Bohg J, Kragic D. Learning grasping points with shape context[J]. Robotics & Autonomous Systems, 2010, 58(4): 362−377.
[9] Belongie S. Shape matching and object recognition using shape context[J]. IEEE Transactions on Pattern Analysis & Machine Intelligence, 2002, 24(4): 509−522.
[10] Mori G, Malik J. Estimating human body configuration using shape context matching[J]. Lecture Notes in Computer Science, 2002(2352): 666−680.
[11] 王瑞峰, 陈旺斌. 基于灰色神经网络的S700K转辙机故障诊断方法研究[J]. 铁道学报, 2016, 38(6): 68−72. WANG Ruifeng, CHEN Wangbin. Research on fault diagnosis method for S700K switch machine based on gray neural network[J]. Journal of the China Railway Society, 2016, 38(6): 68−72.
[12] Eker O F, Camci F, Kumar U. SVM based diagnostics on railway turnouts[J]. International Journal of Performability Engineering, 2012, 8(3): 289−298.
Application of fast shape context algorithm in fault diagnosis of switch control circuit
XIAO Jinshan, XIA Rongbin, KONG Linggang
(Changzhou Research Institute, Lanzhou Jiaotong University, Changzhou 213000, China)
Aiming at the problem that fault diagnosis method of switch control circuit is relatively backward, a fault diagnosis system for switch control circuit based on fast shape context algorithm was designed by combining theoretical research and practical research. The system used a two-dimensional array to store the normal current and eight typical abnormal current curve data of S700K switch machine uploaded by the sub-module in the microcomputer monitoring system to form a database, theXdistribution was used to calculate the matching price between the curve to be matched and the database curve. According to the size of this value, the working state of the switch control circuit was judged to realize fault intelligent diagnosis. The case analysis and system test show that the method can be effectively applied to the fault intelligent identification of switch control circuit and has certain practical value.
switch control circuit; fast shape context; fault diagnosis; S700K switch machine; database
U284.72
A
1672 − 7029(2019)08− 2091 − 09
10.19713/j.cnki.43−1423/u.2019.08.028
2018−10−22
江苏省创新能力建设计划产学研联合重大创新载体项目(BM2016004);甘肃省自然科学基金资助项目(18JR3RA116)
孔令刚(1978−),男,安徽肥东人,副教授,从事轨道交通自动化研究;E−mail:850726917@qq.com
(编辑 阳丽霞)
