长波红外干涉光谱成像仪比较及变间隙法布里- 珀罗型光谱成像仪设计
2019-09-11孟合民高教波王楠吴江辉高泽东赵宇洁刘方
孟合民, 高教波, 王楠, 吴江辉, 高泽东, 赵宇洁, 刘方
(西安应用光学研究所, 陕西 西安 710065)
0 引言
红外光谱成像技术利用不同物质在一定光照、温度环境下的光谱差异,可用于危险化学气体探测、矿区筛选、军用目标探测识别等领域,具有远距离非接触式和大范围扫描的特点。一般来说,由于目标和背景温差较小,长波红外光学系统相对于可见光系统图像对比度和信噪比更低,需要较大的通光孔径来保证足够的光通量,使得其体积、质量更大。提高系统信噪比和小型化设计是多平台应用的关键技术。干涉调制光谱成像技术型具有多通道优势,能获得较高的信噪比,适用于长波红外波段[1-2]。常见的适用于光谱成像技术的干涉仪有Sagnac干涉仪、Michelson干涉仪及其变型和变间隙法布里- 珀罗(F-P)干涉仪。目前还没有在长波红外波段高透过率的光学胶,干涉仪应避免胶合。另外,锗(折射率n≈4.0)、硒化锌(折射率n≈2.4)、硫化锌(折射率n≈2.2)等红外材料折射率较高,大尺寸材料制造难度较大、价格高,从避免全反射和节约成本角度考虑也应限制使用大块棱镜实体结构。
在危险化学气体探测和识别中,传统方法需要深入污染区取样,然后放入仪器设备中测量。这种方法虽然能准确测量样本,但也带来人体危害和设备沾染问题,并且效率较低、不适合大范围探测。
本文在深入研究干涉光谱遥测原理基础上,比较多种方案的优缺点,最终选择变间隙F-P原理并研制了原理样机。研究了干涉仪驱动控制方法和光谱反演、标定算法,并通过对化学品的试验对比研究,为大范围危险化学气体探测和识别提出新的、更安全的方法。
1 干涉光谱成像方案
1.1 分体式Sagnac干涉仪
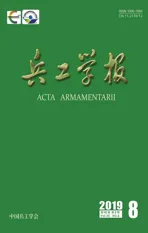
Sagnac干涉仪分出的两束光是反向共光路的,可有两个或多个反射面。两面反射镜与分光面呈相同角度,其中一面反射镜相对于对称位置沿分光面方向有错位量。入射光被“半透半反”分光膜分成透射光和反射光两束,并以完全相反的方向经过同一个三角形光路,最后以相同角度和一定的错位(即横向剪切量)投射在出射端面上。经过成像物镜后,两束平行光将以一定的光程差会聚在探测器焦平面阵列(FPA)的同一位置并发生干涉[3-4]。采集数据时,系统相对于目标场景匀速转动或平移,使目标在探测器上一帧时间内恰好移动一个像元,如图1所示。
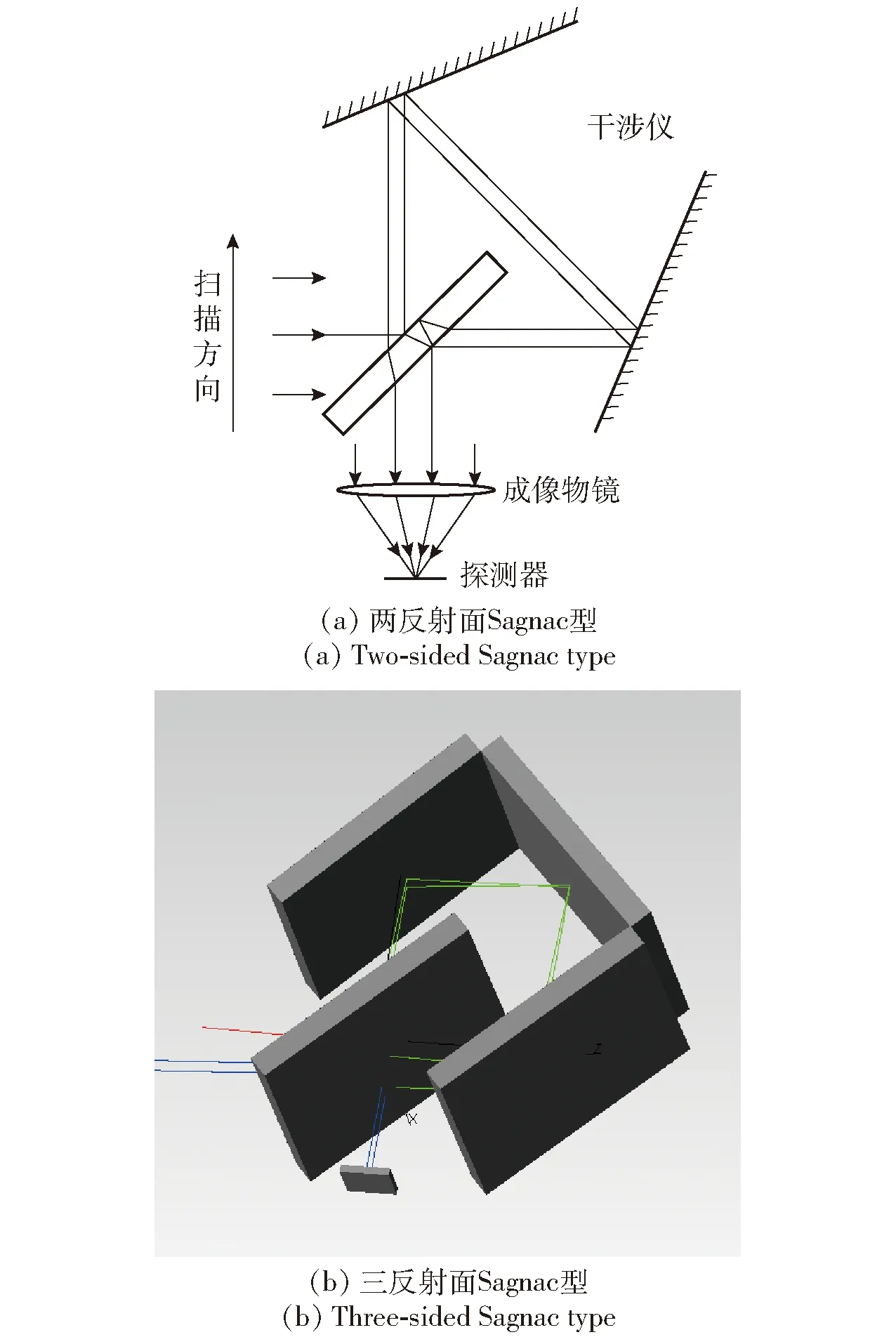
图1 Sagnac干涉光谱成像系统Fig.1 Sagnac interferometric spectral imaging system
三反射面Sagnac干涉仪略有不同,其反射面和分束面在垂直纸面方向上是平行或垂直的,分束面相对反射面的位置平移和旋转不会产生光束横向剪切,仅可依靠分束面和与其平行的其中一个反射面沿自身水平轴线倾斜产生横向剪切,横向剪切量是垂直于纸面的。数据采集时,系统应做俯仰摆动或沿竖直方向移动,如图2所示。
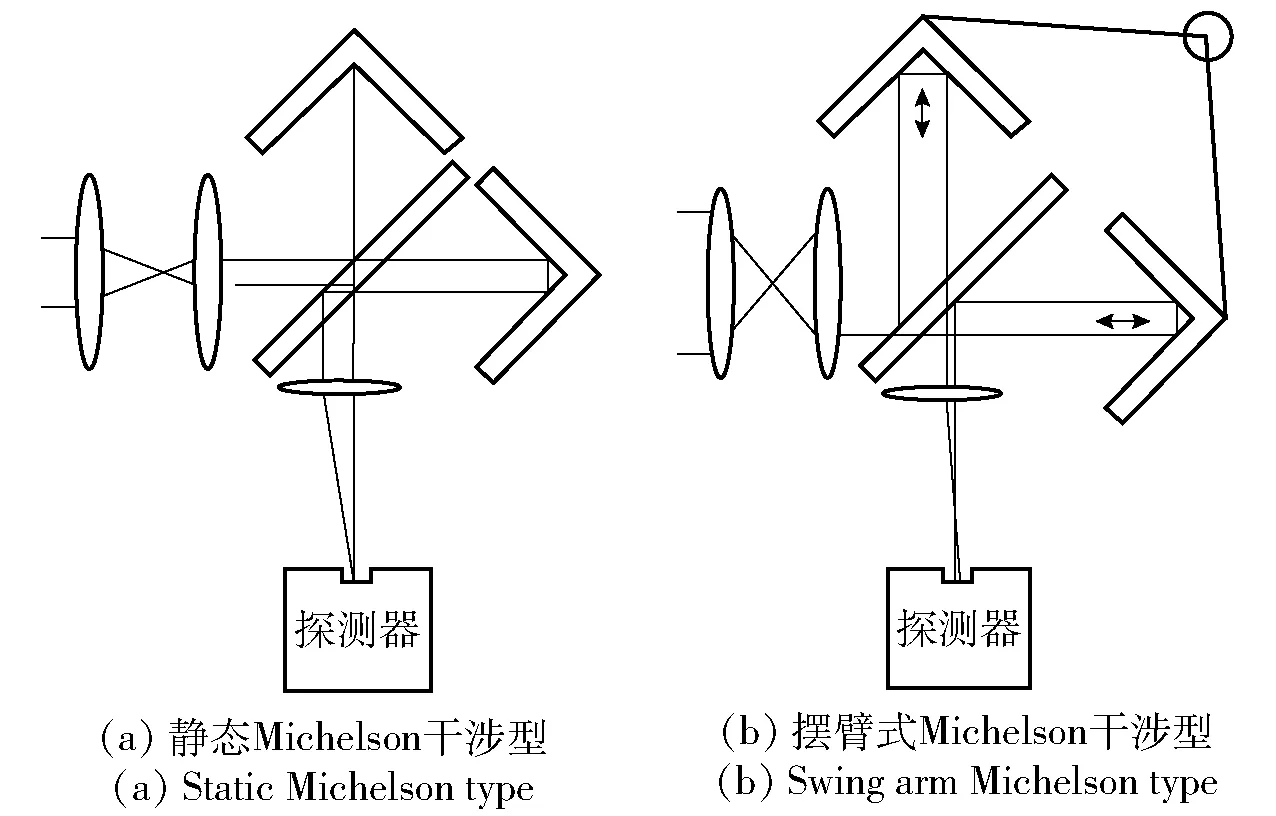
图2 Michelson干涉光谱成像系统Fig.2 Michelson interferometric spectral imaging systems
1.2 Michelson干涉仪
经典Michelson干涉仪依靠两个平面反射镜中的一个做平移运动改变两束光的光程差,容易受震动而失调。静态Michelson干涉仪由分束镜和两个角反射镜组成,其中一个角反射镜从对称位置垂直于入射光方向错位布置,使两束光横向剪切进而产生光程差,干涉仪自身无运动部件,需安装在旋转台上转动或相对目标匀速移动,以获取目标的完整干涉信息[5]。
摆臂式Michelson干涉仪将两个角反射镜分别安装在沿各自光轴的滑轨上,并将角反射镜链接在摆臂的两支。摆臂的旋转带动角反射镜相对分束镜的位置变化,产生纵向光程差,属于时间调制原理。由于摆动角度和光程差的非线性关系,需要在光路中设置波长较短的激光作为参考以获得精确的采样步长。
1.3 变间隙F-P干涉仪
变间隙F-P干涉仪,利用平面和斜面两个反射面间的变间隙构成的一个谐振腔,光入射至反射面后在腔内多次反射然后出射,穿过腔体不同次数的光束产生干涉,根据两个反射面的夹角和反射率的不同形成一定规律的干涉条纹[6-12](见图3)。
图3 变间隙F-P干涉仪原理图Fig.3 Schematic diagram of variable gap F-P interferometric imaging instrument
干涉腔设计需满足采样定理,即
(1)
式中:Δmin为最小采样步长;p为探测器间隔;α为两个反射面的夹角;λmin为工作波段的最小波长。
对于单色光,其干涉强度分布为
I=I0(R2-2R+1)[1+R2+2Rcos (2πσΔ)],
(2)
式中:I0为入射光强;R为干涉腔反射率;σ为入射光波数;Δ为光程差。
对于有一定宽度的复色光,干涉强度分布为
(3)
式中:σw为入射光的波数宽度;σm为中心波数。由(3)式可以看出,光强中既包含能解算有效信息的交流分量也包含直流分量。实际探测器接收的信号还有探测器经干涉腔反射的干涉信息、系统自身辐射引入的杂散光等。
干涉腔固定时,探测器光谱成像仪FPA上光程差分布正比于与中心列的距离,形成干涉条纹。当干涉腔垂直于光轴匀速平移时,FPA各列光程差也随之变化,获得从0到最大光程差的完整信息,在数据处理中需要从不同帧图像中提取。
1.4 干涉仪设计比较
为方便比较上述5种干涉仪方案的优劣,基于相同的视场(10.4°)、空间分辨率(47″)、光谱分辨率(8 cm-1)等系统参数分别展开设计。其中选用的探测器长度约100 mm,640×480像元,像元尺寸17 μm;成像物镜f=75 mm,F/1.
两反射面Sagnac干涉仪、三反射面Sagnac干涉仪和Michelson干涉仪的光路展开比较,计算出端面L、出瞳直径r、光程S2、半视场角θ之间的几何关系如下:
(4)
(5)
由于两反射面Sagnac干涉仪中两束光反向共光路,3次经过分束镜所在平面时要求依次经过分光区、透射区和分光区而不重叠,拉大了元件间的距离[13],在预留一定的安装余量情况下总光程S2分别约为出瞳直径r的18.9倍。采用类似的分析方法,三反射面Sagnac干涉仪和Michelson干涉仪的总光程S2分别出瞳直径r的10.5倍和5.2倍,如果采用不同的出瞳直径和视场角,计算结果会有变化,但3种干涉仪的相对关系不变。如图4所示。
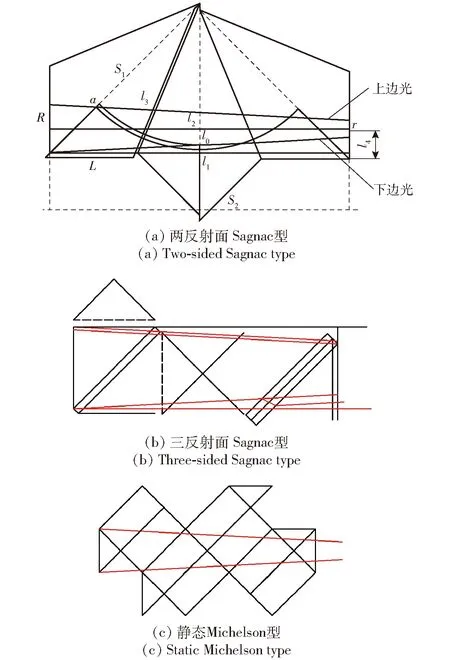
图4 光路展开Fig.4 Unfold optical path
比较干涉仪尺寸和估算的系统体积,并比较工作模式和控制精度要求,如表1所示。表1中考虑了探测器尺寸、安装尺寸余量等因素。
从表1的分析结果看,静态Michelson型和变间隙F-P干涉型在体积上具有明显优势,而后者在控制精度要求上优于其他方案[14]。
2 变间隙F-P干涉仪扫描驱动设计
根据第1节的分析结果,选择变间隙F-P干涉光谱成像仪方案开展设计和研制。采用长波非制冷探测器,使用步进电机驱动干涉仪匀速扫描,工作波段7.7~13.5 μm,探测器640×480像元,像元尺寸17 μm,干涉组件内一次像面的像元尺寸为34 μ m,光谱分辨率约8 cm-1. 变间隙F-P型原理样机如图5所示。

表1 干涉方案比较

图5 变间隙F-P型干涉仪原理样机Fig.5 Variable gap F-P prototype
干涉组件置于物镜焦面上,即一次像面;中继境将一次像面上的干涉图像透射到探测器FPA上。干涉组件的移动,使得FPA上同一位置的干涉光程差发生变化。系统采用内部推扫方式,即通过机械扫描结构沿垂直光轴方向来回移动对称楔形干涉仪,视场中的目标像不会发生偏移,而干涉条纹移动,并受不同目标的调制而发生变化。干涉仪组件的扫描采用步进电机驱动丝杠螺母结构,带动干涉仪在导轨上按照编程路径循环运动。采用霍尔传感器控制扫描的极限位置。丝杠螺距为1 mm,电机步进角1.8°,相对位置精度为5 μm,小于一次像面像元尺寸。干涉组件扫描结构如图6所示,驱动控制原理如图7所示。
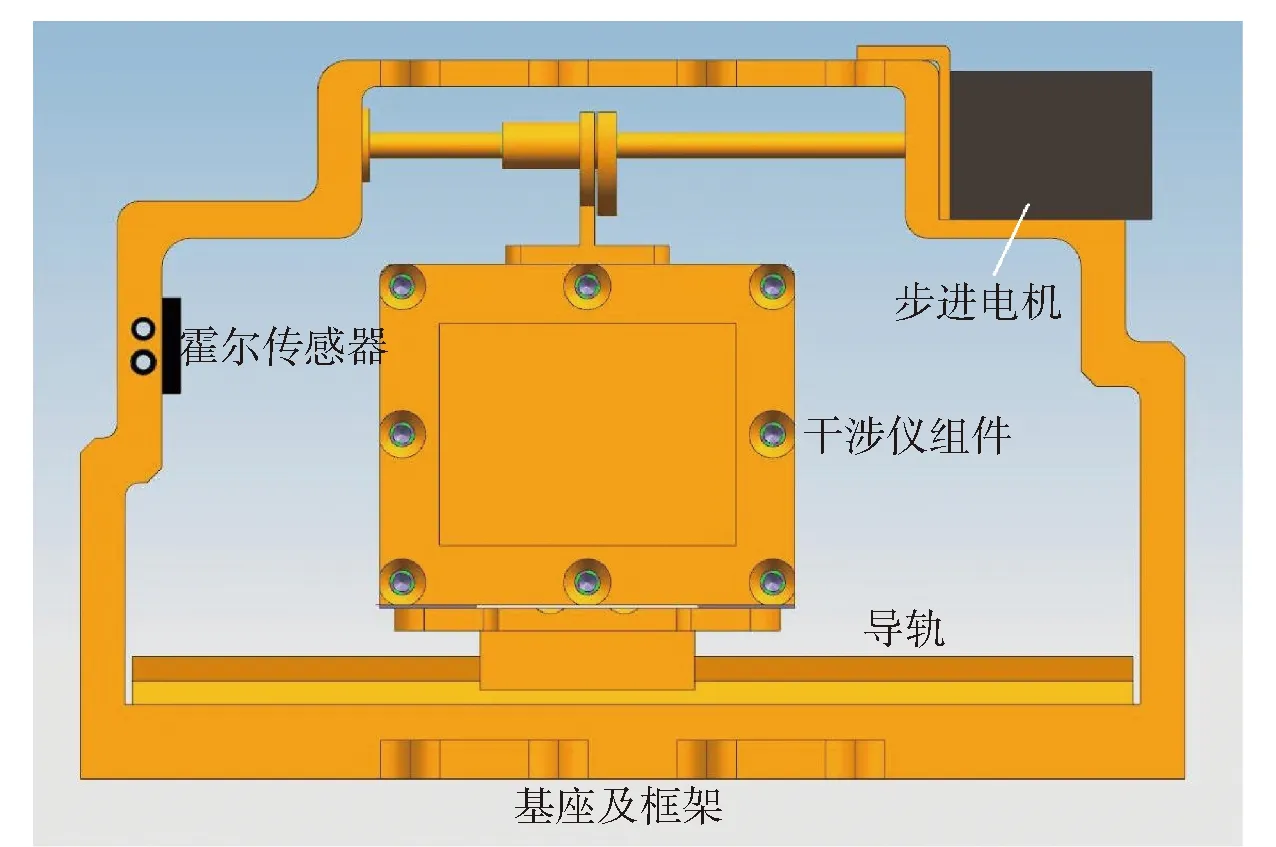
图6 变间隙F-P型原理样机扫描机构Fig.6 Scanning mechanism

图7 变间隙F-P型原理样机驱动控制原理图Fig.7 Schematic diagram of driving control
3 数据处理方法
为验证变间隙F-P型干涉仪原理样机的性能,使用该样机进行化学品的探测试验,并分析数据处理中所涉及的算法。
3.1 化学品探测试验
对甲基磷酸二甲酯(DMMP)化学试剂进行测试,获取的光谱特征与精度更高的MR170光谱仪测试曲线轮廓和横坐标所示的峰值波长位置结果有较好的一致性,如图8和图9所示。图8中多条曲线表示了变间隙F-P型干涉仪原理样机测试图像中多个位置的谱线。

图8 变间隙F-P型干涉仪原理样机对DMMP的测试结果Fig.8 DMMP result of prototype

图9 MR170光谱仪对DMMP的测试结果Fig.9 DMMP result from MR170 spectrometer
3.2 光谱数据处理
干涉光谱成像技术的光谱成像系统通过条纹图样记录光谱信息的,但是这些条纹图样不能直观反映目标光谱信息。干涉条纹图样与光谱信息之间存在精确的数学关系,经过一系列数学处理及变换运算后可得到准确的光谱信息[15]。具体流程如图10所示。

图10 光谱成像数据采集处理流程Fig.10 Acquisition and processing flow of spectral imaging data
3.2.1 数据重排
数据采集时,干涉组件在原始图像的一帧时间里相对于目标移动一个瞬时视场角(IFOV)。为获得各物点的干涉光强分布,需要在各帧图像的相应像元上提取该物点的干涉强度,并依照光程差顺序重新排列。
3.2.2 基线校正
光谱反演是对干涉条纹的交流分量进行,变换前要先减去直流分量。另外,“渐晕”也使干涉强度的基线随光程差的增大而向下弯曲。使用微分函数进行基线校正是简单有效的方法。根据傅里叶变换的微分性质,如果有
(6)
即时域(空域)信号微分,频域信号乘以自身频率。因此将干涉条纹强度在空域微分后作傅里叶变换,得到的光谱需要再除以各自频率位置ω,即得到原始信号的光谱。
3.2.3 切趾
傅里叶光谱变换的空域积分上限、下限是无穷大,即要求干涉仪产生的光程差无限长,而实际干涉图的最大光程差受到限制,即被一个矩形“窗函数”截断。为减轻矩形函数窗函数造成的“光谱泄漏”,这种效应需要对干涉条纹强度进行“切趾”处理,选择函数值由中心向两边逐渐变小的窗函数,缓和在干涉条纹两端的突变。常用的切趾窗函数有三角窗、高斯窗和汉宁窗等。
3.2.4 傅里叶变换
目标光谱信息和干涉条纹信息互为傅里叶变换的关系,从干涉信息反演光谱时需要设置好采样步长(或采样频率)和工作波段范围,其中采样步长需要提前标定。傅里叶变换的计算量较大,而各点的计算又是独立的,可采取多CPU和GPU并行处理技术提高运算速度。
3.2.5 光谱辐射标定
光谱标定的作用是确定反演出光谱的准确位置和光谱分辨率,光谱标定系统的关键是产生准直的单色光。对于干涉光谱系统来说,实际的采样步长可能和设计值略有偏差,在傅里叶变换光谱反演计算中直接决定了光谱值对应的频率横坐标;而光谱分辨率一般用信号的半高宽表示。因此,光谱标定输出的结果是采样步长和对单色光反演出的半高宽,分别作为该仪器在其他测试中傅里叶变换的输入参数和系统的光谱分辨率。测量出标定精度为2 cm-1. 光谱标定装置和算法分别如图11和图12所示。

图11 光谱标定装置Fig.11 Spectral calibration device
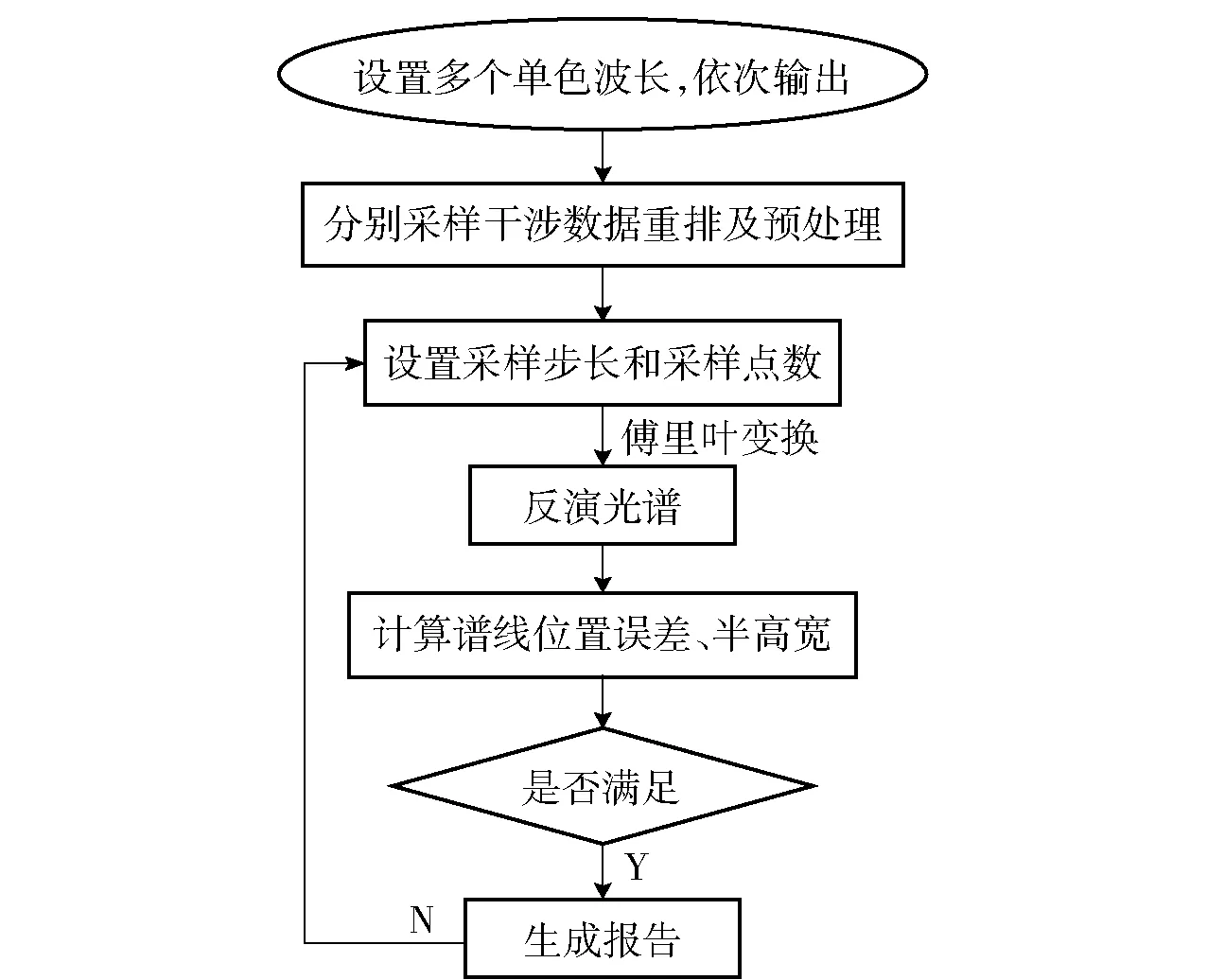
图12 光谱标定流程Fig.12 Spectral calibration process
辐射标定是将光谱成像仪获取的原始电压信号转换为绝对的光谱辐射能量(如辐射亮度、辐射照度、辐射温度等)。采用的非制冷探测器,根据光路的可逆性原理,探测器实际接收到信号的是目标产生的透射干涉条纹和探测器热背景在干涉腔后腔面产生的反射条纹叠加,由于相位相反,两组干涉条纹亮暗位置恰好互补,随着目标温度的变化,条纹亮暗分布会随之发生反转。对于工作于线性范围内的成像光谱辐射仪,则其探测器输出与输入的目标场景辐射亮度间存在线性关系。使用变温黑体对光谱成像系统进行辐射标定,目标场景标定前后如图13所示。

图13 辐射标定前后对比Fig.13 Target scenes before and after radiation calibration
4 结论
本文针对长波红外光谱成像测量的特点,分析了5种干涉型光谱成像仪方案,并从多方面比较了各方案的优缺点,筛选出的变间隙F-P干涉仪方案体积较小、结构复杂度和控制精度要求适中,具有综合比较优势。研制了使用非制冷探测器的变间隙F-P干涉仪,设计的内部扫描机构和驱动控制方法达到了设计1个像元以内精度要求。根据该型成像光谱仪干涉信息分布在不同帧的图像序列中、收到非制冷探测器及系统自身辐射影响的特点,针对性地设计了数据处理流程。主要得出以下结论:
1)计算分析表明,在各种方案中,变间隙F-P干涉仪方案体积较小、驱动控制较容易实现。
2)通过对DMMP化学试剂的探测试验,变间隙F-P干涉仪获得的结果与高精度MR170光谱仪获得的结果吻合,在主要吸收峰分别为9.6 μm、11 μm、12.4 μm位置处互相照应。
3)干涉光谱成像仪的数据反演算法和光谱辐射标定算法准确有效,其中光谱标定精度达2 cm-1.
在后续研究中将进一步提高仪器的灵敏度、分辨率和操作便捷性,使红外干涉光谱成像技术在气体遥测等领域走向实用。