从舰载无人空中监视打击系统项目受挫看美军的创新阻力
2019-09-10葛宋
葛宋



“无人时代”正在到来,大型舰载无人作战飞机将是未来海战场上的明星。美国海军在舰载无人空中监视打击系统( UCLASS)项目采办上大力投入,但最终以失败告终,在一定程度上反映了美海军创新体制上的一些问题。可以肯定的是,美国海军在追求大型舰载无人作战飞机的道路上不会停止脚步。
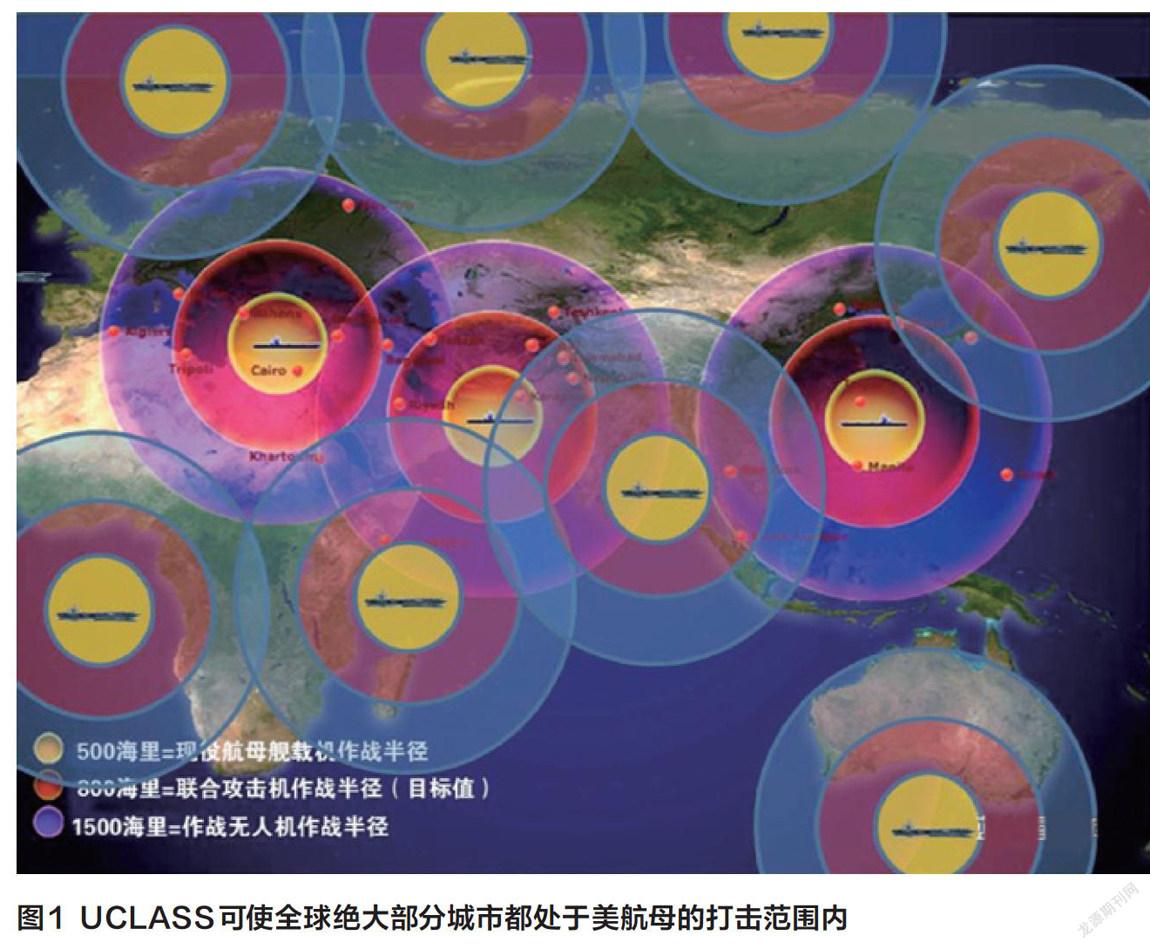
舰载无人空中监视打击系统项目是美军典型的创新项目,美国海军曾希望UCLASS能提供对抗新兴威胁所需的能力,即在反介入/区域拒止威胁下,保持在全球范围内投送兵力的能力。
UCLASS项目最初想一步到位发展具备自主打击能力的无人作战飞机,但最后不得不一再降低需求,直至最终被无人加油机项目替代。UCLASS这一具有重大创新性的新项目遇挫,原因是多方面的,也一定程度上反映了美军创新体制上的一些问题。美国有学者就直接指出官僚主义是美军创新的最大阻力。
美海军舰载无人机发展从“多级跳”回归“逐级跳”
美海军对大型舰载无人机的能力需求,从低到高可分为四级:舰上起降及保障、空中加油、情报监视与侦察、自主作战。美海军通过X-47B验证了大型舰载无人机的自主起降能力后,启动UCLASS项目,期望实现“多级跳”,直接发展具备自主打击能力的大型作战无人机,这一跨越式发展存在诸多争议。遭受挫折后,美海军选择发展舰载无人加油机( CBARS),回归“逐级跳”方式,稳步提升舰载无人机能力。
舰载无人空中监视打击系统的演变历程
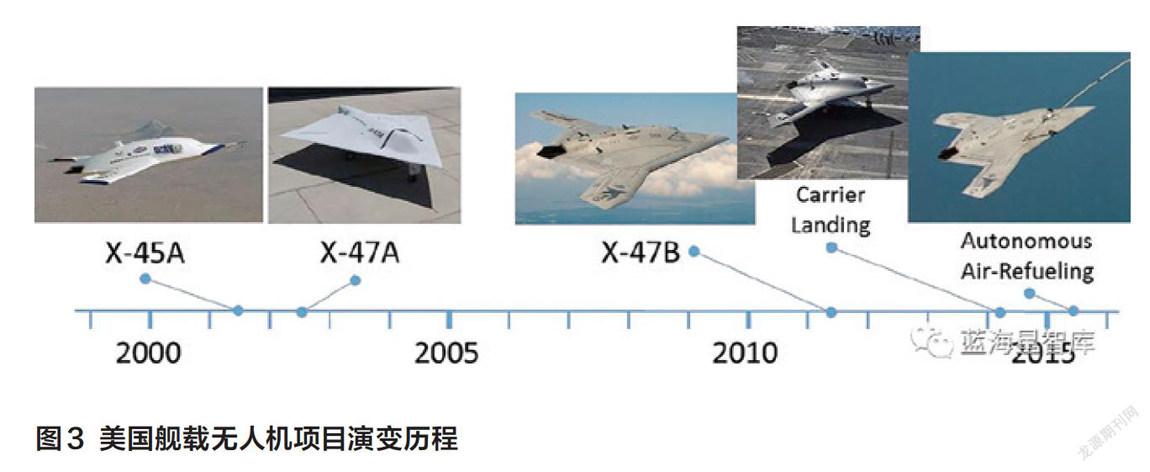
美国海军于2000年正式启动无人作战飞机样机研制。此后十多年中,美军开展了三个项目:海军单独开展的“海军无人作战飞机”( UCAV-N)项目;海军与空军合作开展“联合无人作战系统”(J-UCAS)项目;空军终止无人作战飞机研制计划后,海军独立开展“无人作战飞机系统演示”( UCAS-D)项目,先后进行了×-45NB/C/N和X-47NB验证机研制和技术演示验证。其中×-47B突破了大型固定翼无人机舰上起降技术、舰机适配技术、空中受油技术,为型号研制奠定了基础。
根据十多年的技术发展及从海军无人空中作战系统演示项目中获得的经验,美海军从2011年开始正式启动舰载无人作战飞机项目,具有巨大创新前景的舰载无人空中监视打击系统应运而生。但军方对于UCLASS项目的需求一直充斥着的混乱和争议。
UCLASS项目能力需求一再降低,最终被无人加油机替代
最初在2011年,美国海军将舰载无人空中监视打击系统构想为一种可在反介入/区域拒止空域提供深度打击能力的穿透型作战系统。国防部联合需求监督委员会( JROC)于2011年6月批准了海军的初始能力文件( ICD)。
此后,出于对项目成本的担忧,海军制定了一项采办策略,即先降低舰载无人空中监视打击系统的能力要求,后续再改进提升。海军将UCLASS的运行环境由反介入/区域拒止空域改为仅限于较低威胁环境,有效载荷也由6000lb降低到1000lb。2012年,海军降低项目需求的请求得到联合需求监督委员的批准。2013年4月,海军作战部长( CNO)签署了能力要求降低版的舰载无人空中监视打击系统的能力开发文件( CDD)草案,并于2013年6月批准了海军的采办策略。海军于2014年4月发布招标书的正式草案,招标书草案中仅要求无人机在无对抗的环境中作业。
尽管海军成功利用联合能力集成与开发系统( JCIDS)过程让能力降低版的初始能力文件获得批准,并制定了螺旋式采办策略,但国会普遍持反對意见,认为能在有威胁的反介入/区域拒止环境中充当远程监视和打击装备的无人作战飞机才是美国真正所需要的。国会试图通过授权和拨款等方式敦促海军研发能力更强的平台。但最终国会和海军妥协,国防部于2016年2月将舰载无人监视与打击系统项目调整为舰载无人加油机( CBARS)项目。随着舰载无人空中监视打击系统的退出,美海军在兵力投送方式上的大胆创新也被扼杀。在选择创新和传统任务模式(即利用载人战斗机进行打击)之间,美海军选择继续执行现有任务模式而不是寻求创新。
从UCLASS项目的失败看美军的创新阻力
美军舰载无人空中监视打击系统旨在发展一个真正创新的、具备完整能力的无人作战系统,但项目最终以失败告终。在201 1年提出舰载无人空中监视打击系统的首次构想时,美国军事工业铁三角(国会、军队和工业部门)均对此表示支持。四家潜在主要承包商对利润丰厚的合同展开竞争,也让业界十分兴奋。在如此大好形势下,为新兴反介入/区域拒止环境设计的创新型舰载无人空中监视打击系统最终演变成仅支持传统任务的加油机,其原因值得深思。美国国防大学的两位学者通过对UCLASS项目采办过程的分析,发表了《创新缺失:UCLASS的悲剧》,明确指出官僚主义是阻碍美军创新的重要原因。
创新失败的机理
企业或组织创新失败的原因主要可归结为以下三类:
一是技术/创新不起作用:主要是“技术差距”——技术还未发展成熟、不能满足真正的需求,或实现的时间太迟了。
二是缺乏过渡路径:所谓的采办“死亡之谷”——缺乏落实创新的过程,缺乏从技术研发到应用部署的过渡计划。
三是难以克服的现状惯性:突破维持现状的阻力以实现变革——缺乏关键的利益相关者,或变革的原因不具备足够说服力,不认为特定的创新是必要的,保守势力维护自身利益。
美学者认为UCLASS项目创新失败与官僚主义阻力相关
美国国防大学学者对UCLASS项目创新失败的原因进行了分析。前述的技术差距原因不能解释UCLASS项目的失败。UCLASS项目能满足真正的需求:发展创新性的舰载无人空中监视打击系统能够填补真实的能力差距,解决航母在反介入/区域拒止环境中投送兵力问题。UCLASS已有足够的技术储备:经过超过15年的概念研究和技术开发、再加上截至2016财年超过10亿美元的海军无人空中作战系统演示项目投资,发展舰载无人空中监视打击系统所需的技术已得到验证并变得成熟。
第二个原因是广为人知的“死亡之谷”,隐喻项目的科技探索或研发阶段与其正式采办之间的鸿沟。“死亡之谷”表示有前景的新技术因缺乏资金、赞助、作战人员支持或其他形式的官僚主义疏忽,而无法从技术阶段过渡到实用阶段。美海军采取了诸多举措,以便衔接海军无人空中作战系统演示项目( UCAS-D)到实用型舰载无人空中监视打击系统之间的“死亡之谷”。在UCLASS项目招标书的整个制定过程中,UCAS-D项目的研发资金发挥了很好的桥连作用。联合需求监督委员会批准的2011年UCLASS初始能力文件也很好地衔接了前期的工作,且国会对UCLASS的明确支持确保了资源可用。因此,“死亡之谷”问题也不能解释UCLASS项目的失败。
排除前两种让创新的UCLASS项目失败的解释后,只剩下第三种解释:官僚主义阻力。在美众议院军事委员会召开的关于UCLASS的听证会上,国会议员福布斯在他的讲话中指出:正如从装甲部队到机械化部队、从帆船到蒸汽动力船、从战舰到海军航空、或在20世纪90年代后期采用无人机的各次转变一样,试图维持现状的组织和官僚机构通常会首先反对带来艰难变化和破坏当前惯例的所有想法。创新的最大阻力来源于机构中的人员和组织不愿改变现状,官僚主义阻力会抗拒创新,或将创新误用于对旧模式的加强。从舰载无人空中监视打击系统转变为舰载空中加油系统的示例中可以看到,舰载无人空中监视打击系统将威胁载人打击平台地位甚至有可能完全取而代之,而舰载空中加油系统则有助于进一步巩固载人平台的地位。创新往往需要得到“特立独行者”的支持:即支持发展新能力和改革军队的军方官员。就舰载无人空中监视打击系统而言,到目前为止,美海军中这些“特立独行者”的影响力并没有达到影响下一代航母能力建设的水平。
结语
美国海军在UCLASS项目采办上投入了大量的精力和经费,但项目最终是以失败告终。原因是多方面的,也在一定程度上反映了美海军创新体制上的一些问题。可以肯定的是,美国海军在追求大型舰载无人作战飞机的道路上不会轻易言弃。
(转载自蓝海星智库。)
