基于DSP的混合式步进电机细分调速系统设计
2019-09-10邵海龙
邵海龙
摘要:本文运用两相混合式步进电机细分控制理论,在DSP的视角下实现对混合式步进电机数字化控制系统的设计,该系统以DSP为主控制器件,实现混合式步进电机的电流、转速和反馈的数字化控制,同时结合实际应用分析其效果以及对电机性能的提升作用,为DSP技术在电机细分调速方面的后续应用提供一定的技术支撑.
关键词:DSP;两相混合式步进电机;细分调速;调速系统;分析
中图分类号:TM301.2 文献标识码:A 文章编号:1673-260X(2019)04-0092-03
步进电机细分控制技术在步进电机的运行当中能够克服传统电机在低中速下性能不好的不足,在现代电机的发展中具有良好的运用前景和发展潜力.步进电机转矩矢量控制技术能够很好地控制电机运行过程中的输出转矩和幅值,增强电机运行的稳定性,保障电机运行中的动态特性,在电机控制方面作为一种新型的技术而具有广阔的发展前景[1].随着现代技术的不断进步,一种新型的数字信号处理技术——DSP应用而生,在电机控制领域产生了DMC(数字电机控制)技术和多重技术相互应用的复杂电机控制技术,大大提高了电机的運行速度和效率.
1 两相混合步进电机的细分控制原理
步进电机的细分控制原理经历了将近二十年的发展历程,在过去技术不发达的情况下常常受到电子元件开关频率、运算速度等方面的限制,在具体的应用中很少使用细分控制技术[2].随着微电子技术的不断发展,特别是DSP技术的发展,为步进电机细分控制技术提供了应用的机会.
1.1 步进电机频域划分及角速度波动的特点
步进电机控制脉冲的频率(fcp)以及逻辑通电状态(N1)、转子齿数(p)与平均转速三者之间呈现很大的相关性.三者之间构成如下的方程式:
步进电机在运行的过程中可以根据频率的大小分为极低频、低频和高频三种状态.步进电机在低速时容易出现低频振动的现象,这十分不利于电机的正常运转[3].因此在实际的低频与超低频情况下可利用细分技术完成电机转动时的转矩波动和角速度波动的调节,从而提高步进电机速度的控制精确度.防止电机在运行的过程中因转速过快而发生剧烈的振动,影响电机的效率和使用年限.
1.2 两相混合式步进电机细分控制理论
在运用两相混合式步进电机细分控制理论时,可以忽略定子线圈的波动,将线圈的自感作为一个常量计算出转矩:
其中电机转子的齿数为p,永磁体等效电流为Im,两相绕组与永磁体等效励磁电流的互感为Msr,两相电流为iA,iB.该式即为步进电机细分控制的理论基础,从该式中可以看出两相混合式步进电机的矩角特性与正弦曲线的特性基本相符[4].
当在两相混合式步进电机的两相绕组上加上该式所示相角关系的电流
从上面的式子中可以看出同步电机的运转与其具有很大的相似性,那么对于两相混合式步进电机的分析既可以等价为一台永磁同步电机来分析,假设两相永磁同步电机转子齿数为P,此时该两相混合式步进电机就等同于一台2P个电极的两相同步电机.在理想模型下,如果用模拟的正弦,余弦电流分别加载在步进电机的两相,将会得到同步电机相近的转矩特性,从而确保电机匀速旋转[5].步进电机的控制细分效果正是基于微步驱动方式,即将加载在步进电机上的正、余弦电流数字化得到的.
2 DSP实现两相混合式步进电机细分控制
两相混合式步进电机细分技术的主要任务就是两相电流基值的计算,并按照以上的计算式子得到两相的电流[6].因此为了达到这一设计目标,先求出电机A相和B相电流的给定值,然后与电机A相和B相电流负反馈的值进行比较,最后得到两者之间的差值.在PID环节进行处理,在系统的事件管理器中输出脉冲,进而驱动系统开关的闭合,最后完成对驱动系统的控制和电流的控制技术.具体的控制原理如图1所示.
首先可以参照公式(4)中的方法确定电机A相和B相的电流值,得到A、B两相每个细分微步的电流值.为了完成数字化计算,必须在微控制器的程序存储器中存储细分控制函数基值表以备查取[7].由于所选用DSP为16位,故按照如下方式完成电流基值的计算,其中括号代表取整数:
其中微步数为t.
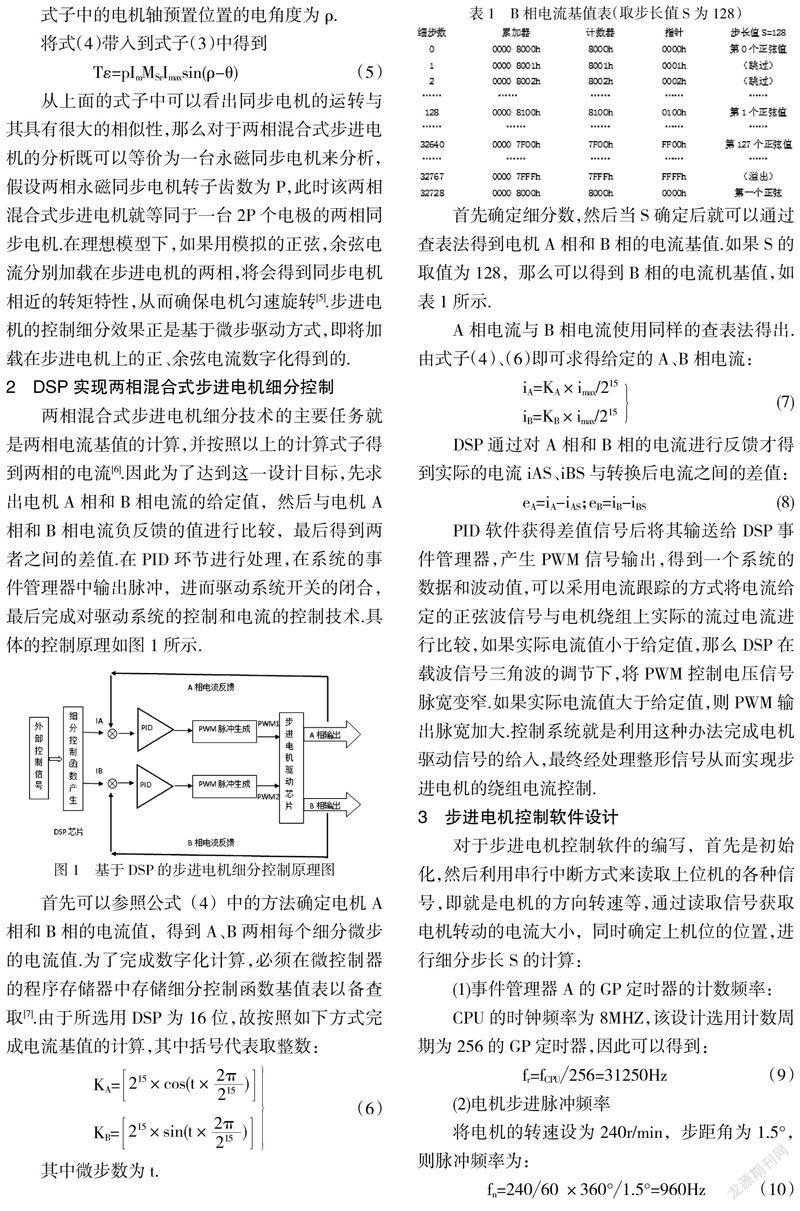
首先确定细分数,然后当S确定后就可以通过查表法得到电机A相和B相的电流基值.如果S的取值为128,那么可以得到B相的电流机基值,如表1所示.
A相电流与B相电流使用同样的查表法得出.由式子(4)、(6)即可求得给定的A、B相电流:
DSP通过对A相和B相的电流进行反馈才得到实际的电流iAS、iBS与转换后电流之间的差值:
PID软件获得差值信号后将其输送给DSP事件管理器,产生PWM信号输出,得到一个系统的数据和波动值,可以采用电流跟踪的方式将电流给定的正弦波信号与电机绕组上实际的流过电流进行比较,如果实际电流值小于给定值,那么DSP在载波信号三角波的调节下,将PWM控制电压信号脉宽变窄.如果实际电流值大于给定值,则PWM输出脉宽加大.控制系统就是利用这种办法完成电机驱动信号的给入,最终经处理整形信号从而实现步进电机的绕组电流控制.
3 步进电机控制软件设计
对于步进电机控制软件的编写,首先是初始化,然后利用串行中断方式来读取上位机的各种信号,即就是电机的方向转速等,通过读取信号获取电机转动的电流大小,同时确定上机位的位置,进行细分步长S的计算:
(1)事件管理器A的GP定时器的计数频率:
CPU的时钟频率为8MHZ,该设计选用计数周期为256的GP定时器,因此可以得到:
(2)电机步进脉冲频率
将电机的转速设为240r/min,步距角为1.5°,则脉冲频率为:
(3)电机细分数
(4)求步长值
得到步长之后利用控制系统存储器中的电流基值表,配合给定的电机电流峰值,得出电流给定值.然后通过闭环系统反馈的电流值得到绕组实际电流,经过差分运算求出误差值.再利用PID调节完成PWM的控制信号,最后与电机正反转的DSP信号一并送往电机驱动电路,完成电机的驱动.在控制软件主程序中步进电机旋转方向可以在系统的作用下完成对不同电流的输入和输出,并决定逻辑信号的方向.如果需要反转时就会得到相同的信号[8].电机整步运行时,2路控制输出口输出等脉宽方波,步进电机运行频率即就是输出脉冲频率.步进电机正向,反向转动时,两路控制输出口方波相角相差90度.
4 系統调试
完成控制系统的设计,并与控制电机完成连接进行上电运行调试.首先利用主控DSP的IOPB4和IOPB5输出的I/O信号决定电机的旋转方向.然后进行细分控制与微步距角的调试.控制绕组上的正余弦电流完成细分控制,当微步距角进行周期变化时,发现电机的转速也周期性的发生变化,如果与电机的固定频率相接近的时就容易发生振动的现象,这种现象对电机细分的应用范围有了很大的限制,导致电机运行缺少平稳性.因此如何改善步距均匀性是需要解决的一个重要问题.唯一的办法就是设置细分驱动系统的位置闭环,能够实现较高的精确度和定位,它可以在电机的运行中排除摩擦力、负载力等引起电机不稳定的因素.但其缺点是需要在装置上加上检测的元件,且分辨率受到检测元件的限制.还有一种方法可以通过对细分驱动微步距角进行反复循环的测定,得到转子位置与微步距角之间的关系曲线,从根据函数曲线减小距角的范围.
总结
混合式步进电机作为工业控制中心常用的一种电机,随着数字信息技术的发展应用前景将逐渐的广阔.本文以DSP技术为核心,运用到两相混合式步进电机中设计了数字控制系统,经过系统的设计和运行能够完成步进电机的细分调速并且控制系统与计算机两者之间的实时通讯畅通.该控制系统具有良好的发展潜力,特别是在数控机床等领域的应用前景比较明朗.
参考文献:
〔1〕林鑫,余世明,朱建江等.混合式步进电机细分控制方法优化策略研究与仿真[J].机电工程,2012, 29(2):196-199.
〔2〕许金,郭庆,徐翠锋等.ARM处理器的蠕动泵步进电机细分驱动系统[J].单片机与嵌入式系统应用,2015,15(9):38-41.
〔3〕刘绒侠,王健.基于CPLD的双极性步进电机细分驱动器设计[J].桂林电子科技大学学报,2013,33(4):292-295.
〔4〕谢长君,杜康,刘力等.两相步进电机细分驱动器研究[J].武汉理工大学学报(信息与管理工程版),2013,35(6):851-855.
〔5〕黄慰辉,李训根.三相混合式步进电机细分驱动器的设计[J].杭州电子科技大学学报,2015,(4):16-19.
〔6〕易淼.步进电机细分技术在显微镜自动调焦系统中的应用[J].江西教育学院学报,2013,34(3):10-12.
〔7〕郑国平.基于Simulink仿真的步进电机细分控制分析[J].计算机与数字工程,2014,42(8):1407-1411.
〔8〕刘霜,李兴根.新型三相步进电机细分驱动器设计[J].轻工机械,2013,31(4):60-63.
