基于仿生原理的残疾人机械臂设计
2019-09-10陈红友高翔宇
陈红友 高翔宇

【摘 要】智能化产品的发展为残疾人的生活带来了便利,本设计是根据仿生原理,以STM32单片机作为核心,使用三轴加速度计和三轴陀螺仪对手臂的运动姿态进行检测,通过NRF2.4G传输信号,驱动多路数字舵机来实现机械臂与人体手臂动作的同步,以达到控制机械臂能够同步做出人体手臂动作的目的。经过硬件制作和软件调试,结果表明,该基于仿生原理设计的残疾人机械臂能够帮助手臂残障的人士能如同正常人一般的生活。
【关键词】STM32单片机;仿生原理;残疾人;机械臂;陀螺仪
引言
据第六次全国人口普查统计,肢体残疾人高达2472万,因此对基于仿生原理的残疾人机械臂设计的研究有一定的现实意义。仿生机械臂是通过对人类手臂的模仿,创造出的一种能够实现将手爪移动到所需位置和承受抓取工件的重量,以及手臂本身的重量等目的的机械装置。仿生机械臂是仿人学与机械臂领域应用需求的结合产物,从机械臂的角度来看,仿人机械臂则是机器人发展的高级阶段,其生物特性为机器人的设计提供了许多有益的参考,使得机器人可以从生物体上学习如自适应性、运动多样性和灵活性等一系列良好的性能。
1.系统总体设计方案
1.1系统整体框架
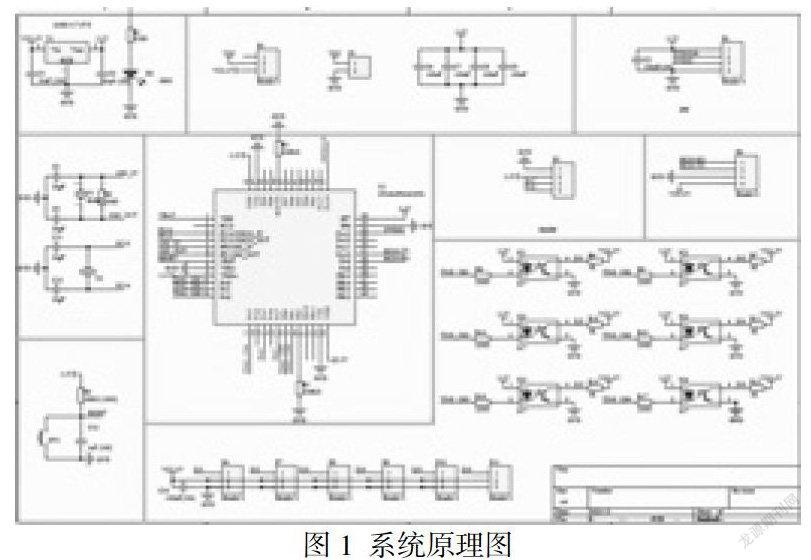
该机械臂利用蓝牙模块,陀螺仪传感器模块、AD模块、LCD显示模块、时钟模块、舵机等来实现自动化跟随人手臂的运动,陀螺仪传感器传感器感应X、Y、Z三角度的变化,A/D转换模块进行模数转换,所得数字信号送入单片机进行数据处理,时钟模块用来计算并显示时间,最后将得出的结果发送到液晶显示器进行显示 ,两个蓝牙模块相互通讯,用以实现远程控制。
考虑到功能实现与响应时间,我们选择采用两块STM32F103C8T6作为控制系统和机械臂的主控芯片,控制系统以5V锂电池为供电单元,JY-901九轴陀螺仪传感器将采集到的角度信号传送给ADC0832,ADC0832进行数模转换将数字信号送给单片机进行处理,然后把数据通过LCD屏幕显示出来,再以200ms为时间间隔传输数据给机械臂。由于本次课题设计应用实际情况,能够实现远距离无线对机械臂进行控制,本次设计选择的蓝牙模块是HC-05模块,HC-05 是一款高性能的从机蓝牙串口模块,可以同各种带蓝牙功能的电脑、蓝牙主机、手机、PDA、PSP 等智能终端配对,HC-05蓝牙模块支持很大的波特率范围:1200~115200,并且模块兼容 5V 或 3.3V 单片机系统,使用非常灵活、方便。通过发送相应控制代码,使机械臂能够准确的接收当前角度的数据。机械臂接收到数据之后,使用PID算法使机械臂快速、平稳、准确的运行。
1.2系统原理

该设计数据发送端通过陀螺仪实时测量三维角度,角速度计算公式为:
滚转角(x 轴)Roll=((RollH<<8)|RollL)/32768*180°
俯仰角(y 轴)Pitch=((PitchH<<8)|PitchL)/32768*180°
偏航角(z 轴)Yaw=((YawH<<8)|YawL)/32768*180°
得到三维角度之后,单片机会将测量的角度显示在LCD显示屏上,并且每200ms把数据传送给数据接收端。
数据接收端接收到数据之后,对比当前的数值和前一次接收到的数据,计算其中的差值,计算好之后,使用PID算法使机械臂能够快速、稳定的运动到设定的空间位置。
2.软件整体设计
该机械臂的整个程序的思路是:角度信号进行模数转换,单片机读取角度的数字值,经处理,然后将角度值送至液晶显示器中进行显示,并通过蓝牙模块发送实时数据。
MAIN.C
int main(void)
delay_init(); //延时函数初始化
LED_Init(); //初始化与LED连接的硬件接口
uart_init(9600); //串口初始化为115200
TIM_PWM_Init(1439,999);//不分频。PWM频率=72000/(899+1)=80Khz
OLED_Init(); //初始化OLED
OLED_Clear();
LED0=1;
DuoJi_Init(); // 舵机初始化
while(1)
Usart_Init(); // 串口初始化
3.系统实现效果分析
本设计采用了STM32单片机为整个系统的微控制器,在实现全部功能的同时极大的降低了成本,与其他微控制器相比,成优势较高,采用了以ADC0832芯片为核心的数模转换模块,保证了信息的传输。采用了高性能的陀螺仪,能够感受到角度的轻微变化。而且加入了时钟模块,时钟模块采用内部供电的方式,给残疾人提供了极大的方便。整个系统稳定性好,操作简单方便,为机械臂系统更加出色的完成任务提供了无限可能,又具有蓝牙模块,适用于远距离的调控,即数据的传输。
4.结语
(1) 本文设计采用高度集成化的A/D转换芯片、单片机和液晶显示模块。大大简化了硬件电路,显著降低了电路板的体积和成本。
(2) 电压信号采集芯片ADC0832是系统正确工作的首要前提,为确保模拟信号的可靠采集,采集前需使用集成运放将传感器信号放大。
(3) 本系统不需要上位机的控制信号,在实际运行中更加贴近生活,达到较好的控制效果。
(4) 本机械臂的控制系统体积小、检测精度高且成本很低。适宜机械臂使用。
参考文献:
[1]齐杨.六轴工业机械臂运动控制系统设计与实现D];硕士学位论文;广西:广西科技大学,2019.5.
[2]马宇豪.六自由度机械臂避障轨迹规划及控制算法研究[D];中国科学院大学;硕士学位论文.北京:中国科学院大学,2019.5.
[3]王春荣.运用SolidWorks与ANSYS的仿人机械臂设计与分析[J];三明学院学报;2020年04期.
(作者單位:郑州科技学院 电气工程学院)
