多功能医疗康复床的技术研究
2019-09-10陆佳浩葛江滨陈佳莹胡露滢
陆佳浩 葛江滨 陈佳莹 胡露滢
摘要:随着我国老龄化的严重外加意外事故的增多,大大的增加了人们对康复设备的需求,同时也越来越多的人开始认同智能机械康复训练设备在康复治疗中的重要作用,并且开始不断进行相关方面的研究,使用智能机器人技术进行康复治疗得到迅速发展,在全球范围内获得了突飞猛进的进展,尤其是一些发达国家,比如美国、日本、德国、瑞士等,这一领域近年来在国内的一些发达城市也得到了相应的重视。针对现在市场中也有很多的类似康复机械的存在,不过目前市场中的康复机械机构功能单一,且价格昂贵。同时市场中存在的康复设备大多是悬挂式或穿戴式,坐卧式康复机械很少。本产品就采用了坐卧式康复,这样大大的增加了使用者的方便和舒适感。
关键词:智能机器人;生理学运动参数;肌肉功率;坐卧式康复
1 引言
医疗康复有下肢康复、上肢康复、手指康复等等。同时下肢康复又可以分为踝关节和膝髋关节然康复,上肢康复又可以分为手臂肘关节及肩关节。而目前市场中存在的康复机械都是单一的对某一个部位进行康复,这大大的限制了一些客户对康复的需求。基于此本文对多功能医疗康复床的关键技术进行研究。
2 医疗康复床的功能及性能分析
医疗康复床是通过带动患者进行适量的、特定的重复性训练来促进大脑皮质的重组,让患者通过深刻的体验来学习和储存正确的运动模式。医疗康复床是对传统康复物理床经典治疗点的基础上进行的整合与优化设计,主要解决不同康复阶段,患者需要进行治疗仪器转换的问题,能够满足了不同患者不同康复阶段的需求。在本作品中,多个治疗控制能同时完成,实现了从传统型到多功能型的飞跃。该作品针对患者的病理步态特征,在步行姿态、上下肢的协调运动、手指关节、膝髋关节、踝关节的运动控制能力等方面对患者进行正确的引导和训练。
3 医疗康复床的康复机构组成
3.1手指关节运动设计
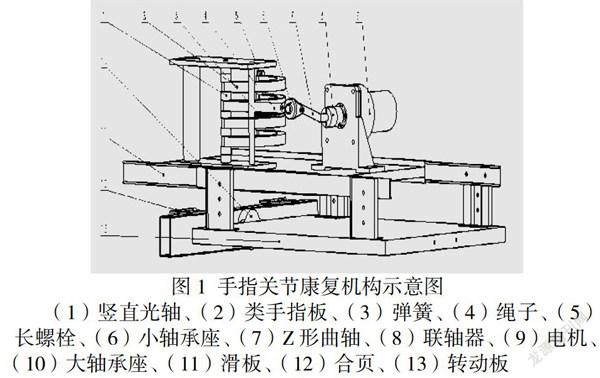
本作品设计的关节部分如图1,采用4块半圆类手指型,4块类手指呈层叠竖直摆放套放,分别于与除大拇指外的4根手指一一对应。每个类手指一端上有一孔与固定的竖直光轴铰接,使其可以绕着光轴转动,另一端用长螺栓相互连接,使每个类手指保持同步转动。类手指的指部中间连接一根弹簧,另一端连接另一根光轴,这根光轴固定在前面那根光轴的另一侧。螺栓端连出一根拉绳到Z形曲轴的一端的轴承座螺栓孔上,轴承座与Z形曲轴端相固定,另一端用联轴器与电机的伸出轴相固定,从而通过电机转动来带动Z形曲轴转动,从而使绳子来回拉动,用绳子的来回拉动和弹簧弹性形变来的实现手的张紧运动。
手指关节部分康复训练机构的取用是先通过合页连接,并与床板垂直放置,然后用手把该机构抬到与床板相平齐,通过大轴承转动转动板180度,把手指关节部分康复训练机构呈现在转动板的正上方,然后推动滑板使该机构往床板方向滑动,到达指定位置后,把患者的手套进与类手指板贴合的手套中,然后就可开始手指关节部分的康复训练。
图1 手指关节康复机构示意图
(1)竖直光轴、(2)类手指板、(3)弹簧、(4)绳子、(5)长螺栓、(6)小轴承座、(7)Z形曲轴、(8)联轴器、(9)电机、(10)大轴承座、(11)滑板、(12)合页、(13)转动板
3.2手臂肘关节及肩关节设计
手臂肘关节和肩关节的模拟运动,分别采用曲柄摇杆机构、曲柄摇块机构实现肩关节和肘关节运动,具体的结构如下:手臂机械上的共有两个手托架,分别固定在手臂肘关节的两侧;在肘关节外侧安装了电动推杆,电动推杆的一端固定在手臂的大臂上,另一端采用铰链连接在手臂的小臂上,因此构成曲柄摇块机构。当电推杆伸缩长度时,肘关节实现弯曲运动;大臂与竖直杆采用铰链连接而形成肩关节,大臂的另一端铰接一个连杆,连杆另一端与底部圆盘铰链连接,因此构成一个曲柄摇杆机构。当底部的肩关节减速电机转动的时候,带动整个手臂机构围绕肩关节摆动,形成手臂肩关节运动;手臂肘关节及肩关节康复器械主要对上肢关节功能患者的肌肉进行训练,合理的运动使人的手臂肌肉力量得到很好恢复,可以用作康复辅助治疗和锻炼。
3.3腿部膝髋关节设计
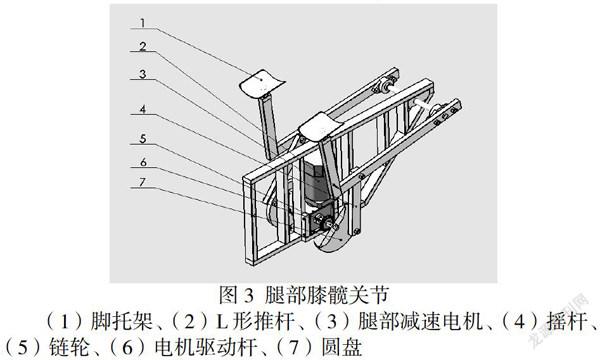
腿部膝髋关节主要采用曲柄摇杆机构来实现机构的整体运动,(如图3)大腿固定在L形推杆的脚托架上,然后通过腿部减速电机带动圆盘转动使一端固定圆盘上的摇杆实现上下升降。由于杆子的另一端与L推形杆固定,从而实现了L推形杆的上下升降,进而实现了膝髋关节的抬升和弯曲运动。通过L形推杆的角位移与角速度,即可实现骨骼按照固定设置的步态轨迹引导患者做运动,满足最基本的被动训练要求。电机与圆盘的配合可以使L形推杆进行往复式运动,L形推杆对大腿的推动,使膝盖弯曲,并且最高可使大腿与小腿的弯曲达到50度,从而达到锻炼效果。
图3 腿部膝髋关节
(1)脚托架、(2)L形推杆、(3)腿部减速电机、(4)摇杆、(5)链轮、(6)电机驱动杆、(7)圆盘
4 结论及展望
多功能医疗康复床不仅功能齐全,且操作简單。同时采用了坐卧式训练,大大的减小了使用者在使用时自身重量的负载,提高了舒适度。多功能医疗康复床适应不同阶段的患者。可实现单个关节和多个关节的同时训练。
对多功能医疗康复床的研究,给很多家庭带来了很多康复的希望,同时可以大大减轻巨额康复治疗费用带来的社会和家庭的经济负担。于此同时康复机械又是一个复杂的多科学叉,高度融合了机电一体化系统,展开它的研究可以进一步的促进机器人科学、现代机构学、机械仿生设计、机械虚拟设计技术等等的一系列发展。
参考文献:
[1] 李庆玲,上肢康复机械臂交互式康复训练控制策略[M].机械工程学报,2008.
[2] 车仁伟,吕广明,孙立宁.无自由度康复机械手臂的设计[J].机械设计,2005.
[3] 宋伟.旋转类康复器具的内部结构分析与改装设计[J].中国康复理论与实验,2005.
[4] 黄培秋,关锦州.康复斜床的制造与使用方法.广东省康复医疗医院,2001.
[5] 姚美霞,朱小红,梁亚群等,电动踝关节功能康复仪的设计及应用.中华护理杂志,2001.
(作者单位:1.浙江工业职业技术学院)