无人机测摄与地理信息系统在工程中的应用
2019-09-10高锐凡
高锐凡
摘要:为了准确反映工程位置地形地物等实际状况,文章通过无人机航拍测量的手段,对所采集到的数据运用地理信息系統进行分析建模,结合航拍影像,还原真实的三维地形,以利于项目初期设计及后期运营管理。
关键词:无人机;地理信息系统;航拍影像;三维地形
中图分类号:U495 文献标识码:A DOI:10.13282/j.cnki.wccst.2019.07.043
文章编号:1673-4874(2019)07-0144-03
0引言
随着社会的发展,人民生活水平条件的不断提高,全国各地的基础设施建设正在热火朝天、有条不紊地进行着。在工程实施的前期,各种方案的提出、设计和调整,需要得到工程项目建设及时有效的地理信息,传统的测绘手段是通过对现有的地形图矢量化,再通过RTK现场调绘补充地形地物,但由于原有地形图形成时间相对久远,地形、地物发生了改变,降低了成果的时效性,已不能满足当前工程项目精准高效的要求。
无人机和测摄设备技术的发展和普及,使得过去一般项目无法承担的具有高额成本的航空测绘逐渐运用到工程建设当中。无人机测绘相对载人航空测绘来说更加高效和精确,并且成本较低,转场速度快,对野外复杂的测量环境具有很强的适应能力。无人机通过搭载高精度摄像机,在目标上空进行低空拍摄,第一时间获取地貌地物的信息。在取得数据的同时,我们还需要一个强大高效的平台对数据进行处理,因为无人机测摄取得的数据量不同于普通的人工测绘数据,是十分庞大的,需要一个系统对数据进行整合。地理信息系统(英文名为Geographic Information System,简称GIS)在计算机和软件程序的支持下,能将所采集到的图像和数据进行储存、计算、分析、拟合、管理和显示,所得到的数据可通过图像的形式展现在我们的面前。
1系统组成与工作流程
1.1无人机航测以及数据处理流程
航测所采用的无人机一般有两种:(1)固定翼无人机;(2)常见的多轴旋翼无人机。固定翼无人机飞行速度快,但负重小,对搭载设备重量较为敏感;多轴旋翼无人机负重能力相对较强,能够悬停滞空飞行,且飞行稳定,适合搭载贵重的测摄仪器。
无人机通过搭载千万级像素数码相机及超广角镜头,结合一定的飞行高度,所得到的航拍照片分辨率达到了0.05~0.15m。拍照时相邻航线的照片旁向重叠度应>30%,相邻照片航高差<30 m,同一航线内航高差<60 m。由于无人机低空摄像采用的是普通数码相机,受到相机视角、航线偏角及高差的影响,多幅照片连接会产生畸变,因此需通过软件进行矫正。矫正软件一般采用Dxo Optics Pro,为法国Dxo Labs开发的一款用于对各类数码相机拍摄照片进行光学及几何处理的软件,其中包括了影像畸变矫正的功能。
原始照片经过畸变矫正后,对照片进行分块处理。分块主要是考虑到计算机处理照片的能力以及数据处理的精度。其分块处理的原则是:
(1)分块之间必须有一定的重叠区域,以便为后期拟合提供对比参照。
(2)分块尽量规整,避免出现狭长的区域。通过分块,对照片分别进行分布式相对定位处理,并且经过空中三角测量数据软件分析运算,得到初步的相对定向正射影像(DC)IVl)、加密的三维点数据以及地面模型。在得到初步成果后,首先应对结果进行检查,将三维点数据导入三维数据浏览软件进行核查,如存在异常点,应将其剔除。其次将地面模型数据导入地理信息系统(GIS)中,并载入正射影像数据,显示地形三维模型,验证地面模型数据是否合理。
根据得到的正射影像,在工程目标地附近布置控制点,并对其进行测量。控制布设应满足以下条件:
(1)控制点应尽量布置均匀,间距控制在300~500 m之间,在地势起伏比较大的区域,应当增加控制点布设的密度。
(2)控制点在野外的实地位置和照片中的影像位置均可以明确辨认。
(3)控制点应选择固定及不易被遮挡的点。对于控制点的选择,应首先在得到的航摄照片上标示,再根据影像图上的标识点进行测量,若实地情况与照片不符,不满足布设条件,则应在原控制点附近重新选点并进行测量,新点与旧点距离不宜过大。
完成控制点测量后,在前面已完成的相对定向正射影像的基础上进行绝对定向处理,导入控制点的绝对坐标和高程后,通过检查各个绝对定向点的误差,将误差较大的点删除。
在完成各个控制点的检查后,便可生成最终的正射影像图(DOM),结果应满足《基础地理信息数字成果1:500、1:1000、1:2000数字正射影像图》(CH/T9008.3-2010)要求。
1.2降低误差,离散点测量
由于正射影像图中有不少地方被植被等物体遮挡,所得到的高程与地表实际高程会有较大的误差。其次,地面模型数据还不能真实反映出道路、河流等地表地物的实际状况,因此需要补充离散点高程测量。而高程点的采集目前一般采用RTK进行碎步测量,离散点的选择应能合理反映实地形态,如梯田坎、陡坎、斜坡、冲沟、悬崖等均按模型采集,并择要测注比高;沟渠、河沟每隔5~10 m测沟底高程;公路、街道、乡村路(路宽>2m)每隔10~15m实测双线路宽。
上述RTK碎步测量为目前普遍采用的一种方法,但其耗费较多的人力及时间。如果要达到更高的时效性以及项目有特别的要求,则可运用无人机搭载激光雷达进行扫描采点,但是其适用于涉及环境面积小的工程,如大范围采用,则会产生海量数据,对计算机处理性能要求较高。扫描所得到的点都具有三维坐标的属性,而一个物体表面则可看作由众多的点组成的系统,这些点处在同一个三维坐标系统中,我们将点集合称之为点云数据。这些点云不仅可以反映物体的形态和位置关系,而且可以通过相机获取色彩影像,并将对应位置的色彩像素赋予到这些点中,使得物体性状更加可视化,如图1所示。
通过上述方法,得到离散点的高程,通过扣减植被高度,调整地面模型數据,形成最终的正射影像图(DOM)以及数字高程模型(DEM)。
2工程实例
无人机测绘以及地理信息系统,已经运用于各种基础设施建设之中,如电力输送基础工程项目、公路工程项目和市政工程项目等,均已经运用并取得良好的实际效果,现以某公路工程为例进行分析:
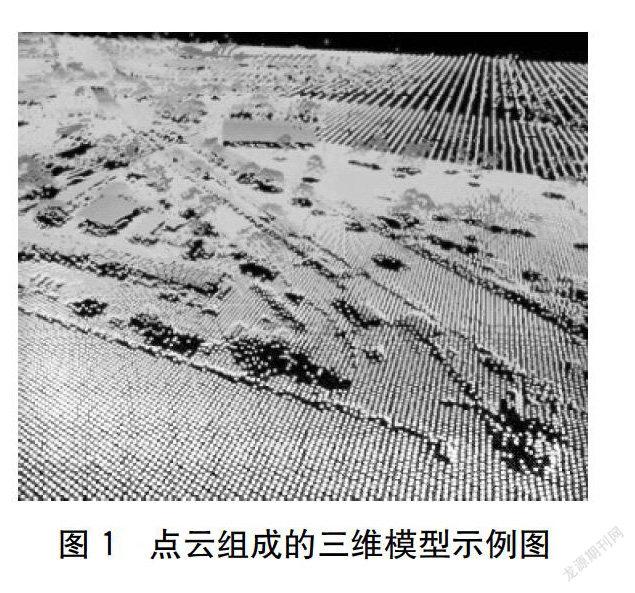
广西某国道提级改造项目,原道路两侧地形除部分地段经过山脚侧边缘外,基本都属于平坦地段,无明显起伏。设计线路走向沿途基本为丘陵及山地路段,相对高差在100 m以内,山地地质为土山,坡度较缓。本项目首先根据甲方提供的路线走向资料,设计航拍线路图(根据不同地区设计不同航拍参数)如下页图2所示。实际航拍范围大约为25m,航拍得到的原始照片共1499张,平均每平方公里约60张。航拍照片为分辨率达到0.05~0.15m的影像。
将航拍所得到的影像图根据前面介绍的方法进行矫正,得到初步正射影像(DQM),如图3所示。
为提高数据处理的进度及计算机利用率,将矫正后的正射影像分块进行空中三角测量数据处理。影像为2400万像素的照片,分块的数量不超200张。本项目正射影像采用分布式执行相对定向处理,需要利用空间三维数据处理软件中的任务分配模块。启动该模块,首先加载块文件,查看网络中可以参与数据处理的机器状况,如是否已经在执行任务,是否可见等;将任务分配到网络中空闲的机器上执行,并将执行的结果回传到指定的服务器目录下;最后得出加密的三维点数据和地面模型,同时检查生成影像的范围是否完整,地物连接是否准确,是否存在错位等情况。
根据得到的路线正射影像图,进行图像控制点的布设。完成控制点测量后,利用正射影像生成工具软件进行绝对定向及影像的制作。将控制点数据导入软件,并将控制点分别设置为计算点、检查点和错误点。其中,计算点为参与计算绝对定向并参与计算绝对定向的误差的点;而检查点为不参与计算绝对定向但参与计算误差的点;错误点则是两者计算均不参与的点。由此,通过这些点来计算绝对定向控制点和检查控制点的误差。
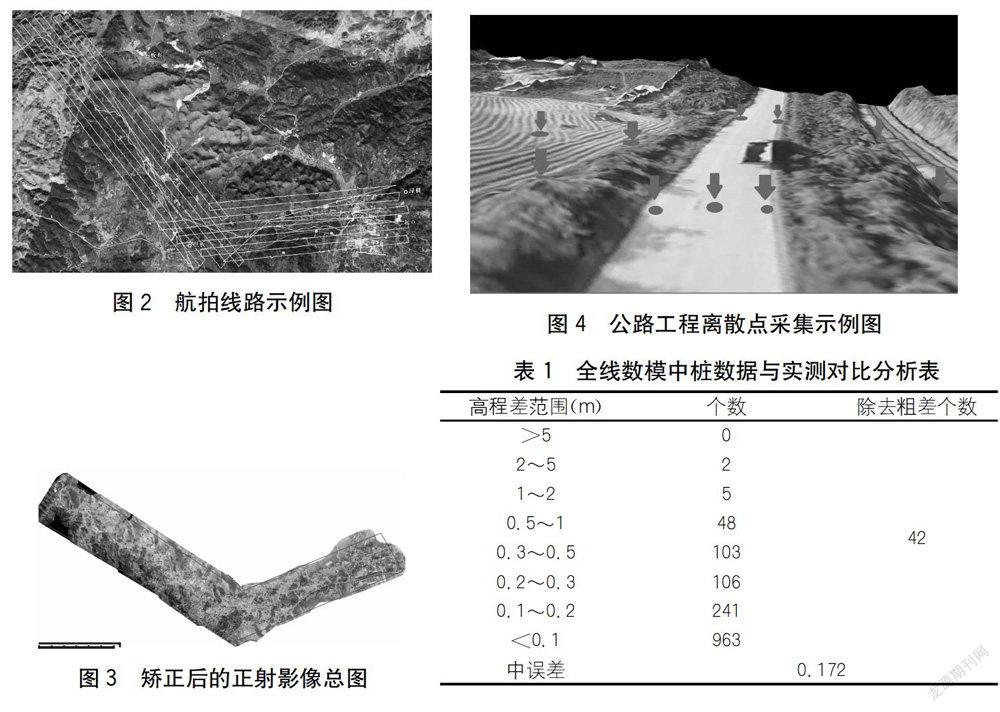
本项目为公路工程,为条状走廊带,应构建公路两侧数字地面模型,主要采集公路两侧的地形,以便更加直观地反映公路及公路两旁的地理形态特征。由于受设备条件及计算机性能的限制,本项目采用RTK采集离散点。公路两侧以外约35m范围内若有沟渠,则采集沟渠底部的高程点;若有陡坎,则采集其坎上坎下的高程点,如图4所示。
通过离散点对地面模型高程的调整,得出的地模数据与中桩实测数据对比如表1所示。
通过上述数据的对比分析,地面模型已能较好地反映出公路周边的地形状况。数模成果满足相关规范规程的精度要求。山地部分中误差为0.35m以内,平地部分中误差在0.15m以内,已达到较高精度,满足工程横断面施工图设计精度的要求。
本项目在设计的过程当中,由于所采用的地形模型是较高分辨率的正射影像及其地形数模,工程周围的地形地物具有很高的辨识度。同时路线设计采用了西安开道万公司的(CARD/1)路线设计综合平台系统,其平台具有开放的底层系统,可以根据自己的具体需求,编辑功能窗口嵌入系统,使得在设计改动的过程中得以实现实时动态,避免以往改线需重新实地测量的过程,使得项目得到良好的后期设计效果,便于后期服务管理。
3结语
本文通过对无人机测绘的简单介绍以及其投入实际工程的运用并收到良好效果的实例,表明无人机测绘及地理信息系统平台可以使设计人员摆脱过去传统的设计流程,让设计人员在地形的三维真实场景下进行设计,从而实现整个项目设计过程和设计结果的虚拟现实化,并能充分考虑地形影响因素、地物影响因素、社会环境影响因素和生态环境影响因素,达到优化设计的目的,利于各项基础设施的建设。