切换时滞神经网络的非脆弱状态估计
2019-09-10崔颖
崔颖



摘要:研究了一类切换时滞神经网络的非脆弱状态估计问题,其中估计器的增益矩阵具有不确定性.首先,通过构造模态依赖的Lyapunov泛函,并利用Jensen不等式和平均驻留时间技巧建立了非脆弱估计器存在的充分条件.接着,应用线性矩阵不等式的一组可行解表示了估计器的增益矩阵.
关键词:切换神经网络;混合时滞;状态估计;线性矩阵不等式
中图分类号:O175.14 文献标识码:A 文章编号:1673-260X(2019)09-0004-04
1 引言
近年来,递归神经网络已被广泛用于信号处理、优化、模型识别、联想记忆等方面[1-2].由于在生物网络中信号传播时间的有限性,或电子网络中放大器切换速度的有限性等原因,各种神经网络常会出现时滞现象.目前,时滞神经网络模型的动力学行为得到了广泛的研究,尤其是稳定性分析.例如,文献[3]运用Lyapunov泛函方法分析了混合时滞神经网络的稳定性.文献[4]针对具有时变离散时滞的神经网络,通过构造增广的Lyapunov泛函,并结合参数依赖的矩阵不等式,建立了时滞依赖的稳定性条件.
另一方面,神经元的状态难以通过网络输出获得,所以,为了获取神经元的状态,我们可以利用获得的测量数据估计神经元的状态.由此而形成的神经网络的状态估计问题已经引起了人们的广泛关注.文献[5]研究了具有模式依賴混合时滞的Markov切换神经网络的状态估计问题.文献[6]针对时变时滞的离散切换神经网络设计了非脆弱的滤波器,使得滤波器在参数不确定的情况下仍能保证状态估计结果的精确性.
此外,神经网络的结构常会呈现切换现象.近来,平均驻留时间方法已被用于分析切换神经网络的稳定性.例如,文献[7]应用比较原理和平均驻留时间方法建立了切换基因调控网络的指数稳定性判据.文献[8]研究了具有无穷分布时滞的切换神经网络在任意切换信号下的鲁棒指数稳定性.然而,具有时变混合时滞的切换神经网络的状态估计问题还有待进一步研究.
综上所述,本文将考虑一类切换时滞神经网络的非脆弱状态估计问题.所研究的状态估计问题中,估计器的参数具有不确定性.首先,我们将运用平均驻留时间方法得到非脆弱估计器存在的充分条件.接着,应用线性矩阵不等式的一组可行解表示了估计器的增益矩阵.
2 模型的刻画
我们考虑时滞切换神经网络如下:
x(k+1)=Ak)x(k)+Bk)f(x(k))+Ck)g(x(k-1(k)))
+Dk)h(x(k-i)), (1a)
y(k)=Ek)x(k), (1b)
x(l)=(l),k0-r≤l<k0, (1c)
其中x(k)∈Rn,y(k)∈Rq分别表示状态向量和输出向量,1(k)和2(k)分别表示时变的离散时滞和分布时滞.记r=max{1,M,2,M},其中1,m≤1(k)≤1,M,2,m≤2(k)≤2,M.矩阵Ak)x(k)=diag{a1,k),a2,k),…,an,k),}(|ai,k)|<1)表示神经元的自反馈矩阵,矩阵Bk),Ck)和Dk)是连接加权矩阵.
f(x(k))=[f1(x1(k)),f2(x2(k)),…,fn(xn(k))]T,
g(x(k))=[g1(x1(k)),g2(x2(k)),…,gn(xn(k))]T,
和h(x(k))=[h1(x1(k)),h2(x2(k)),…,hn(xn(k))]T,表示神经元的激励函数.
在系统(1)中,?滓.Z≥0→∏={1,2,…,m0}表示切换信号,其中m0为正整数.记切换序列为
{(k0),k0),(k1),k1),…,(kt),kt),…,}.
假设1[3] 系统(1)中激励函数f,g,h满足
i-=≤i+,i-=≤i+
i-=≤i+,
其中i-,i+,i-,i+,i-,i+是常数,i∈{1,2,…,n}.
对于切换神经网络(1),我们考虑如下的非脆弱状态估计器
(k+1)=Ak)(k)+Bk)f((k))+Ck)g((k-1(k)))
+Dk)h((k-i))+(Kk)+Kk)(k))(y(k)-Ek)(k)), (2)
其中Kk)为估计器的增益矩阵,增益矩阵的变化Kk)(k)满足
Kk)(k)=Mk)F(k)Nk), (3)
其中FT(k)F(k)≤I,?坌k∈N+.
定义误差向量e(t)=(k)-x(k),再由(1)式与(2)式得到状态估计误差系统
e(k+1)=(Ak)-Kk)Ek)-Kk)(k)Ek))e(k)+Bk)(e(k))
+Ck)(e(k-1(k)))+Dk)(e(k-i)), (4)
其中
(e(k))=[1(e1(k)) 2(e2(k)) … n(en(k))]T:=f((k))-f(x(t))
(e(k))=[1(e1(k)) 2(e2(k)) … n(en(k))]T:=g((k))-g(x(t))
(e(k))=[1(e1(k)) 2(e2(k)) … n(en(k))]T:=h((k))-h(x(t))
定义1 若存在常数∈(0,1)和K>0,当增益矩阵的变化满足条件(3)时,状态估计误差系统(4)的解都满足
||e(k)||≤K||?渍(l)||(?坌k∈Z),
我们称系统(4)是鲁棒指数稳定的.
定义2 如果状态估计误差系统(4)是鲁棒指数稳定的,那么称系统(2)是切换神经网络(1)的非脆弱状态估计器.
定义3 在区间[k0,k)上,切换信号?滓的切换次数记为Nk,k0).如果存在常数N0≥0和T0>0,使得Nk,k0).≤+N0成立,我们称T0为平均驻留时间,N0为抖振界.为简单起见,本文假设N0=0.
本文的目的是设计切换神经网络(1)的非脆弱状态估计器(2).我们将通过构造模式依赖的Lyapunov泛函,并应用线性矩阵不等性方法得到非脆弱估计器(2)存在的充分条件,进而求解状态估计器的增益矩阵.
3 主要结果和证明
在这部分,我们将首先基于切换系统的鲁棒稳定性分析方法得到非脆弱估计器(2)存在的充分条件.为此,我们给出下面一些引理.
引理1[9] 设,和F是具有恰当维数的实矩阵,且F满足FTF≤I,则对?坌?着>0,有
F+(F)T≤?着-1T+?着T
为了方便后面的表示,我们记
1=diag{1-1+,2-2+,…,n-n+}
2=diag{,,…,}
1=diag{1-1+,2-2+,…,n-n+}
2=diag{,,…,}
1=diag{1-1+,2-2+,…,n-n+}
2=diag{,,…,}
我们先考虑下面具有不确定参数的非线性系统
e(k+1)=(A-(K+K)E)e(k)+Bf(e(k))
+Cg(e(k-1(k)))+Dh(e(k-i)),
其中K(k)满足K(k)=MF(k)N和FT(k)F(k)≤I,?坌k∈N+.
引理2 在假设1之下,若存在正定矩阵Q,R,S,对角矩阵∑,r,,和正常数?着使得对任给的∈(0,1),下面的线性矩阵不等式(5)成立,
=
<0, (5)
其中
Ak=A-KE,
11=-Q-∑1-r1-1,
33=(1+1,M-1,m)R-r,
55=[2,m+(2,M-2,m)(2,M+2,m-1)]S-,
则系统(4)是鲁棒全局指数稳定的.
证明 为表示方便,我们引入以下记号
Xk=[eT(k) eT(k-1) … eT(k-r)]T,
(k)=[eT(k) T(x(k)) T(x(k)) T(e(k-1(k)))
T(e(k))T(e(k-i))]T,
=[AK B 0 C 0 D},
(k)=[-K(k)E 0 0 0 0 0},
(k)=[AK-K(k)E B 0 C 0 D},
我们构造如下的Lyapunov泛函:
V(Xk,k)=Vj(xk,k), (6)
其中
V1(xk,k)=eT(k)Qe(k),
V1(xk,k)=k-1-iT(e(i))R(e(i)),
V3(Xk,k)=k-1-iT(e(i))R(e(i)),
V4(Xk,k)=k-1-iT(e(i))S(e(i)),
V5(Xk,k)=k-1-iT(e(i))S(e(i)).
沿著系统(3),可计算V(Xk,k)的差分,
V1(k+1)-V1(k)=T(k)T(k)Q(k)(k)-eT(k)Qe(k) (7)
V2(k+1)-V2(k)≤T(e(k))R(e(k))-T(e(k-1(k)))
×R(e(k-1(k)))+k-iT(e(i))R(e(i))
-k-iT(e(i))R(e(i)), (8)
V3(k+1)-V3(k)=(1,M-1,m)T(e(k))R(e(k))
-dT(e(k-d))R(e(k-d)), (9)
V4(k+1)-V4(k)≤2,MT(e(k))S(e(k))
-T(e(k-d))S(e(k-d)), (10)
V5(k+1)-V5(k)≤(2,M-2,m)(2,M+2,m-1)(T(e(k))
×S(e(k))-dT(e(k-d))S(e(k-d)). (11)
由假设1并应用文献[5]中引理3得
T(e(k))∑(e(k))+eT(k)∑1e(k)-2eT(k)∑2(e(k))≤0, (12)
T(e(k))r(e(k))+eT(k)r1e(k)-2eT(k)r2(e(k))≤0, (13)
T(e(k))(e(k))+eT(k)1e(k)-2eT(k)2(e(k))≤0. (14)
同时,根据离散型Jensen不等式得
-T(e(k-d))S(e(k-d))
≤-T(e(k-d))×ST(e(k-d)). (15)
于是,由(7)-(15)式得到
V(Xk+1,k+1)-V(Xk,k)≤T(k)(1+T(k)Q(k))(k), (16)
其中
1=
事实上,根据Schur complement引理知,
(k)=
<0. (17)
1+T(k)Q(k)<0成立当且仅当(17)式成立.
由于(k)+0+(k),其中
0= ,
(k)=.
记=[0 0 0 0 0 0 Q]T,
=[N 0 0 0 0 0 0].
由条件(3)式得到
(k)≤?着ETTE+?着-1MMTT.
于是,(k)≤0+?着ETTE+?着-1MMTT.故由Schur complement引理知,当<0时,1+T(k)Q(k)<0成立.因此,V(Xk+1,k+1)≤V(Xk,k),进而得到
V(Xk,k)≤V(X,k0),?坌k∈Z≥k0, (18)
故由定义1知,系统(4)是鲁棒全局指数稳定.证毕.
基于引理2,我们将应用平均驻留时间方法得到状态误差系统(4)的鲁棒稳定性.
定理1 在假设1之下,若存在常数?着i>0,正定矩阵Qi,Ri,Si,(i∈∏),和对角矩阵∑,r,,使得对任给的?滋≥1,∈(0,1),下面的线性矩阵不等式成立
T0≥T0*=-, (19)
Qi≤?滋Qj,Ri≤?滋Rj,Si≤?滋Sj, (20)
i=
<0, (21)
其中
A=Ai-KiEi
11,i=-Qi-∑1-r1-1,
33,i=(1+1,M-1,m)R1-r,
55,i=[2,m+(2,M-2,m)(2,M+2,m-1)]Si-,
则状态误差系统(4)是鲁棒指数稳定的.
证明 构造如下的模式依赖Lyapunov泛函:
Vk)(k):=Vk)(Xk,k)=Vj(Xk,k),
其中
V1,k)(Xk,k)=eT(k)Qk)e(k),
V2,k)(Xk,k)=k-1-iT(e(i))Rk)(e(i)),
V3,k)(Xk,k)=k-1-iT(e(i))Rk)(e(i)),
V4,k)(Xk,k)=k-1-iT(e(i))Sk)(e(i)),
V5,k)(Xk,k)=k-1-iT(e(i))Sk)(e(i)).
当k∈[kt,kt+1)时,由条件(21)并应用引理2中(18)式,及条件(20)式得,
Vk)(Xk,k)≤?滋V≤(?滋)V(k0).
再由(19)式得0<?滋<1,故根据定义1得,状态误差系统(1)是鲁棒指数稳定的.证毕.
定理1建立了非脆弱状态估计器(2)存在的充分条件. 接下来,我们将应用线性矩阵不等式技巧得到估计器的增益矩阵.
定理2 在假设1之下,若存在常数?着i>0,正定矩阵Qi,Ri,Si(i∈∏),矩阵Pi和对角矩阵∑,r,,使得对任给的?滋≥1,∈(0,1),下面的线性矩阵不等式成立
T0≥T0*=-, (22)
Qi≤?滋Qj,Ri≤?滋Rj,Si≤?滋Sj, (23)
i=
其中
11,i=-Qi-∑1-r1-1,
33,i=(1+1,M-1,m)R1-r,
55,i=[2,m+(2,M-2,m)(2,M+2,m-1)]Si-,
則系统(1)是切换时滞神经网络(1)的非脆弱状态估计器,其中Ki=Qi-1Pi,i∈∏.
证明 令Pi=QiKi,由(24)式可得(21)式成立,故由定理1知此定理成立.证毕.
4 数值举例
考虑具有两种模式的切换神经网络(1),系统参数如下:
A1=,B1=,C1=,
D1=,E1=[1 0],E2=[0 1],
A2=,B2=,C2=,
D2=,
Mi=diag{0.1,0.1},Ni=[0.1 0.1]T,i=1,2.
6≤1(k)≤8,1≤2(k)≤2,?滋=1.2.
取激励函数为
f(u)=g(u)=h(u)=
由上面的参数,我们可得
1=1=1=0,2=2=2=.
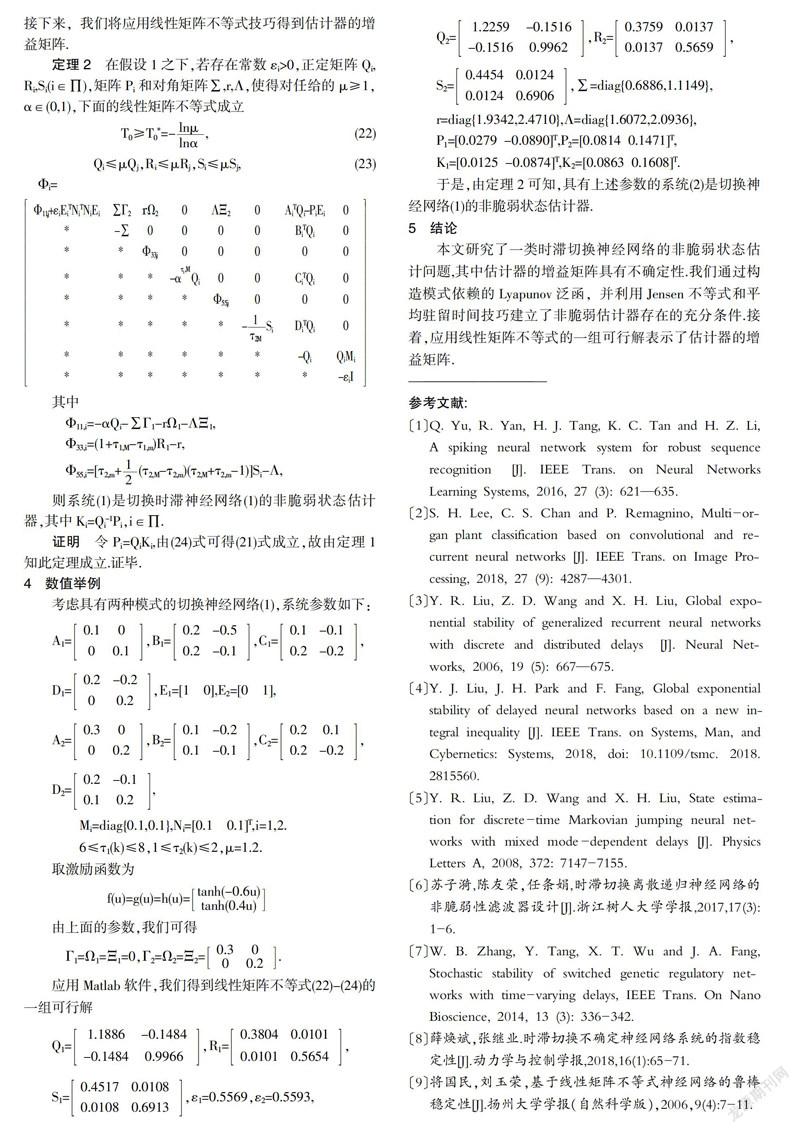
应用Matlab软件,我们得到线性矩阵不等式(22)-(24)的一组可行解
Q1=,R1=,
S1=,?着1=0.5569,?着2=0.5593,
Q2=,R2=,
S2=,∑=diag{0.6886,1.1149},
r=diag{1.9342,2.4710},=diag{1.6072,2.0936},
P1=[0.0279 -0.0890]T,P2=[0.0814 0.1471]T,
K1=[0.0125 -0.0874]T,K2=[0.0863 0.1608]T.
于是,由定理2可知,具有上述参数的系统(2)是切换神经网络(1)的非脆弱状态估计器.
5 结论
本文研究了一类时滞切换神经网络的非脆弱状态估计问题,其中估计器的增益矩阵具有不确定性.我们通过构造模式依赖的Lyapunov泛函,并利用Jensen不等式和平均驻留时间技巧建立了非脆弱估计器存在的充分条件.接着,应用线性矩阵不等式的一组可行解表示了估计器的增益矩阵.
——————————
参考文献:
〔1〕Q. Yu, R. Yan, H. J. Tang, K. C. Tan and H. Z. Li, A spiking neural network system for robust sequence recognition [J]. IEEE Trans. on Neural Networks Learning Systems, 2016, 27 (3): 621—635.
〔2〕S. H. Lee, C. S. Chan and P. Remagnino, Multi-organ plant classification based on convolutional and recurrent neural networks [J]. IEEE Trans. on Image Processing, 2018, 27 (9): 4287—4301.
〔3〕Y. R. Liu, Z. D. Wang and X. H. Liu, Global exponential stability of generalized recurrent neural networks with discrete and distributed delays [J]. Neural Networks, 2006, 19 (5): 667—675.
〔4〕Y. J. Liu, J. H. Park and F. Fang, Global exponential stability of delayed neural networks based on a new integral inequality [J]. IEEE Trans. on Systems, Man, and Cybernetics: Systems, 2018, doi: 10.1109/tsmc. 2018. 2815560.
〔5〕Y. R. Liu, Z. D. Wang and X. H. Liu, State estimation for discrete-time Markovian jumping neural networks with mixed mode-dependent delays[J]. Physics Letters A, 2008, 372: 7147-7155.
〔6〕蘇子漪,陈友荣,任条娟,时滞切换离散递归神经网络的非脆弱性滤波器设计[J].浙江树人大学学报,2017,17(3):1-6.
〔7〕W. B. Zhang, Y. Tang, X. T. Wu and J. A. Fang, Stochastic stability of switched genetic regulatory networks with time-varying delays, IEEE Trans. On Nano Bioscience, 2014, 13 (3): 336-342.
〔8〕薛焕斌,张继业.时滞切换不确定神经网络系统的指数稳定性[J].动力学与控制学报,2018,16(1):65-71.
〔9〕将国民,刘玉荣,基于线性矩阵不等式神经网络的鲁棒稳定性[J].扬州大学学报(自然科学版),2006,9(4):7-11.
