微电网模式切换的转动惯量自适应VSG控制策略
2019-09-10任于涵
李 娟,金 焕,任于涵
(1.湖南工业大学电气与信息工程学院,湖南 株洲 412007; 2.国网淮南市潘集区供电公司,安徽 淮南 232082)
0 引言
随着可再生能源的快速发展,分布式发电及微电网技术受到了广泛关注[1-5]。同传统大电网相比,微电网运行控制灵活,既可与大电网并联运行,也可孤岛运行,可最大限度地利用清洁能源,提高供电可靠性和供电质量[6-9]。清洁能源以微电网形式进行利用被认为是未来新能源利用最有效的方式之一。
与传统电力系统相比,微电网中分布式电源一般由逆变器或少数小容量发电机构成,由于大转子惯量的缺失,微电网的稳定性受到了威胁。文献[10-13]借鉴同步发电机运行特性,将发电机惯量、调频及调压特性引入逆变器功率环控制中,使逆变器具有了与发电机相似的特性,这种控制技术被称为“虚拟同步发电机技术(virtual synchronous generator,VSG)”,采用VSG控制技术将大大提高微电网运行性能。其中转动惯量作为VSG控制的核心,将直接影响到VSG的运行性能。文献[14-16]在VSG控制的基础上研究了转动惯量及阻尼系数对系统运行的影响,并给出控制参数的选择,但并未分析微电网在不同运行模式下的情况。文献[17]分析了微电网多机并联时功率震荡的问题,并指出通过对转动惯量和阻尼系数的合理设置可起到抑制功率震荡的作用;但文中VSG转动惯量取值为固定值,并不能满足微电网不同模式下的性能要求。文献[18-19]在传统VSG基础上提出一种转动惯量自适应控制方法,但文中逆变器为电流控制,并不适用于微电网的孤岛运行。文献[20]提出一种基于模式切换的自适应控制方法,以提高微电网运行性能;但文中VSG在微电网不同运行模式下需要切换控制方式,并没有充分利用VSG控制的优势。文献[21]类比发电机的功角特性,提出一种兼顾微电网并网及孤岛运行的转动惯量自适应控制,但文中并未详细给出相关参数的设计。文献[22]提出一种转动惯量可调的VSG控制策略,但文中仅对系统离网运行情况进行了稳定性分析,且最优模型求解较为困难。文献[23]在转动惯量自适应控制的基础上,提出一种兼顾功率及频率动态性能的改进VSG控制,但文中并未对微电网模式切换过程VSG惯量特性进行研究。
本文在上述文献研究的基础上,对微电网不同运行模式下的转动惯量及阻尼进行分析研究,提出一种适用于微电网不同运行模式切换的VSG控制,Matlab/Similink仿真表明,本文所改进的VSG控制策略能满足微电网不同模式运行。
1 虚拟同步发电机原理

图1 微电网结构及控制框图Fig.1 Microgrid structure and control block diagram
图1为由包含两台VSG控制的逆变器构成的微电网结构图和控制框图。其中:Udc为逆变器直流侧母线电压,Ls为VSG等效定子电抗,Cf为滤波电容,Zline为输电传输线电抗。控制框图中:S表示切换开关,通过不同组合可实现逆变器控制模式的不同转换;Tm、Te、J、Di(i=P、Q)、ω、θ、Mf、if分别表示机械转矩、电磁转矩、转动惯量、有功/无功下垂系数、转子角速度、转子角度、励磁绕组和磁场绕组间的最大互感、励磁电流;Pref、P分别为给定有功和VSG输出有功功率;Qref、Q分别为给定无功和VSG输出无功功率。VSG具体数学方程式为
式中〈i,A〉及〈i,B〉表示内积,且有
1.1 VSG频率控制
VSG的频率控制通过转子运动方程来实现,其中将阻尼系数作为调差系数,并以滤波电感等效为定子电抗,控制结构简单。根据式(1)可得
式中m、τ分别为有功频率系数和惯性时间常数。
VSG频率控制是通过转子运动方程来实现的,并通过阻尼系数即可模拟发电机的一次调频过程,实现多VSG并联运行时的功率均分。
1.2 VSG电压控制
与一次调频过程相似,VSG的电压调整可通过无功电压下垂特性来实现,其表达式为
Q=Qref+DQ(un-u)
(7)
式中un、u分别为给定电压和输出电压。
VSG控制原理实质上相当于在下垂控制的基础上,在有功控制中增加转子惯量,模拟发电机惯量提高微电网运行性能。
2 转动惯量自适应控制
2.1 转动惯量对VSG输出特性的影响
根据前文分析可知,VSG控制具有下垂控制特性,且阻尼系数相当于一次调频系数,所以在下垂系数一定的情况下,转动惯量J将直接影响VSG输出性能。
由VSG控制方程及系统运行结构框图,借鉴电力系统发电机小信号分析法,图2为VSG小信号稳定分析模型。通过小信号分析模型,不难得到有功功率输入、输出特性的传递函数:
(8)
式中Sei为微电网中其中一台VSG同步功率的有名值:
(9)
式中us、δs为系统稳定运行的平衡点,在网络拓扑确定的情况下,其值为常数。
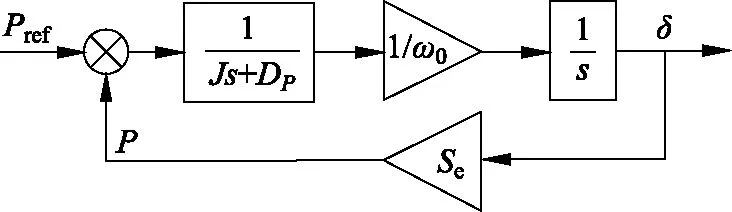
图2 VSG小信号模型Fig.2 Small signal model of VSG
为简化分析,忽略线路损耗,根据式(8)的2阶模型可求得系统无阻尼自然震荡角频率ωn和阻尼比ζ分别为
(10)
阻尼比较小时,G(s)为一个欠阻尼系统;0<ζ<1时,系统在±2%的允许误差内对应的调节时间ts和超调量σ分别为
(11)
根据式(10)、(11)可知,当调差系数DP一定时,J越大,ζ越小,σ越大,调节时间越长。
为分析转动惯量对系统的影响,给出不同转动惯量下VSG输出功率响应曲线,如图3所示。从图中可看出,VSG输出特性与J有直接的联系,J越大,功率震荡越剧烈,功率曲线恶化,系统稳定运行困难。
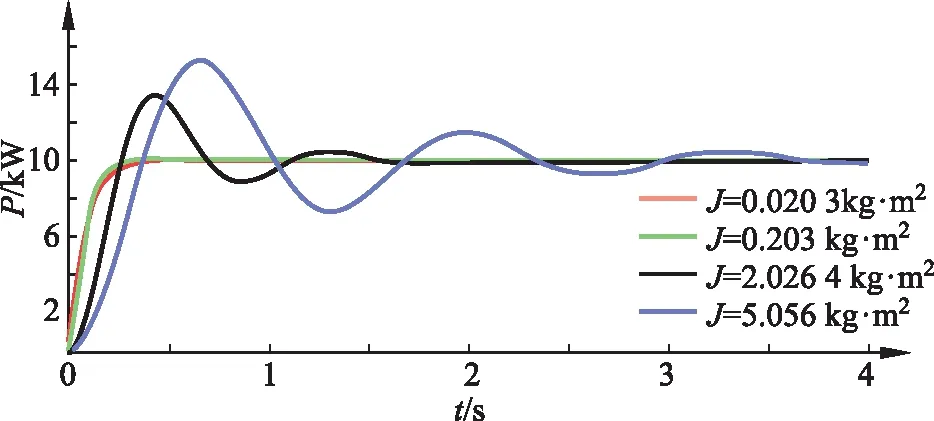
图3 不同转动惯量下有功动态响应Fig.3 Active dynamic response under different J
根据转动惯量和阻尼系数定义,在式(8)的基础上进一步可得到
(12)
式中τf为频率响应时间常数,本文取值为0.02 s。根据式(12)可得到不同阻尼系数下VSG有功动态响应曲线,如图4所示。

图4 不同阻尼系数下有功动态响应Fig.4 Active dynamic response under different D
对比图3、4可发现,VSG控制参数J和D都会对VSG输出特性造成影响,但与阻尼系数相比,转动惯量影响更大一些。并且由于阻尼D充当了一次调频作用,在满足系统频率不越限的情况下,阻尼D一般为常数。所以本文主要研究J对VSG输出特性的影响。
2.2 VSG转动惯量自适应原理
由2.1节分析可知,转动惯量J直接关乎到VSG的输出性能,且通过对图3的分析发现,转动惯量越小系统出现震荡的可能性就越小,但较小的转动惯量不能为微电网在孤岛运行时提供有效的惯量功率支撑。传统VSG控制中转动惯量J为恒定值,难以满足微电网不同模式下的动态性能要求,存在局限性。
本文在参考文献基础上,提出一种适用于微电网不同模式切换的转动惯量自适应控制(adaptive control of inertia,ACI),其结构如图5所示。针对微电网不同的运行模式,将转动惯量J设置为不同值,通过切换开关来改变VSG惯量基值。同时将微电网频率变化量引入到J的调节过程中,使VSG在运行过程中能兼顾频率变化,动态地调整J,可有效改善系统的频率响应。
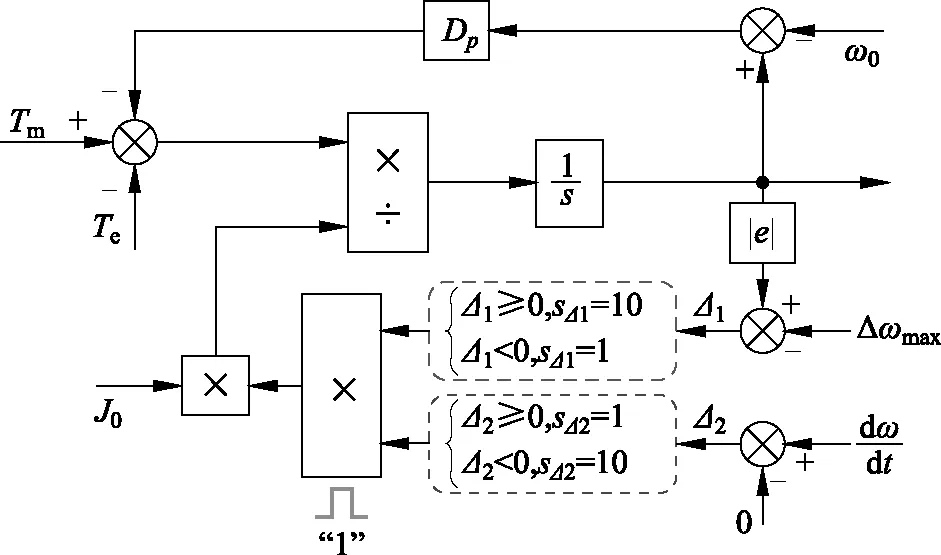
图5 转动惯量自适应控制Fig.5 Moment of inertia adaptive control
在频率调整过程中,原固定转动惯量将变为关于频率变化的函数,能根据微网运行模式及系统频率变化动态地调整J,提高VSG动态响应能力。
2.3 参数整定
2.3.1 VSG并网条件下转动惯量设计

图6 单VSG无穷大系统Fig.6 Single VSG infinity system
当VSG并网运行时,VSG不需要较大惯量,以避免系统出现功率震荡。为简化分析,借鉴电力系统单机无穷大系统静态稳定性分析方法,建立系统小扰动下的小信号模型,图6为VSG单机无穷大系统结构图。
为简化分析,忽略线路上的损耗,VSG输出功率为
(13)
并网运行时,有功无功均采用定功率模式将式(1)、(4)及(13)分别进行小信号线性化,可得小信号模型为
(14)
式中kpE、kpδ、kqE、kqδ分别为
(15)
综合式(14)、(15),可得到
(16)
考虑Δω=sΔδ和式(16),可得到
将系统稳态运行值带入式(17)、(18)中,整理可得单VSG并网运行时的小信号稳定分析结果,如图7所示。

图7 单VSG并网运行稳定性分析Fig.7 Stability analysis of single VSG grid-connected operation
分析图7可知,在不考虑阻尼DP变化时,系统稳定性随J的变化而变化。图7中随着J的增大,极点s1向虚轴方向靠近,且系统将从近似2阶系统演变为3阶系统,导致超调增大逐渐失稳。当J=0.020 3 kg·m2时,s1距离虚轴越远,此时系统最稳定。因此考虑到VSG并网运行时,不需要为电网提供较大惯量,所以J的取值应当越小越好。
2.3.2 VSG孤岛条件下转动惯量设计
当VSG孤岛运行时,微电网系统没有了大电网的支撑,系统惯量降低,当系统中出现较大负荷波动时,系统稳定性受到威胁,所以VSG需要相对较大惯量以避免系统失稳。借鉴电力系统双机并联稳定性分析方法,研究两台VSG并联孤岛运行时的稳定性。图8为双VSG并联微电网系统,图中:U∠0为微电网交流母线电压;δi(i=1,2)分别为各台VSG输出电压相角;Ei∠δi(i=1,2)分别为VSG输出电压;ZL为微电网系统所带负载;Zi∑(i=1,2)分别为各VSG输出的等值阻抗。
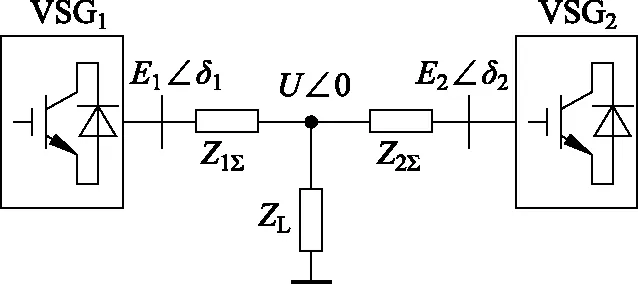
图8 双VSG并联系统Fig.8 Parallel system of two VSGs
为分析微电网孤岛运行下的稳定性,对系统在稳定工作点(ωs、Ps、δs)的VSG转子运动方程进行线性化分析可得
(19)
式中Δωi、Δδi及ΔPei分别为VSG角频率、功角及功率变化量。
则根据功率传输可知有功增量为
ΔPei=SEiΔδ12
(20)
式中SEi和δ12分别为并联系统的同步功率和相对相角差。
为简化分析,考虑两台VSG具有相同的参数,即Ji=J,DPi=DP。结合文献[24]及前文分析,可得到两台VSG并联运行时小信号特征方程:
s3+As2+Bs+C=0
(21)
式中:
(22)
由于两台VSG容量相同,为便于计算,假设负载为纯阻性,逆变器输出阻抗为感性Ls,计算可得到
(23)
整理式(21)—(23)可得到图9所示的两台VSG并联组网运行时小信号稳定性分析结果。

图9 双VSG并联组网运行稳定性分析Fig.9 Stability analysis of dual VSG parallel network operation
分析图9可知,与VSG并网运行情况不同,J对系统稳定运行影响较缓,随着J的增大,极点s1的移动比较均匀;但当J进一步增大时,所有极点仍会向虚轴靠拢,VSG并联系统将也会从一个近似2阶系统转化为3阶系统,并联系统稳定性将会受到很大威胁。
根据2.3节分析可知,无论并网运行还是孤岛运行,系统极点均在左半平面,所以系统总是可稳定下来的。但如果调整时间过程过长可能引发保护装置动作,影响正常运行,所以仍要考虑系统参数的合理设置:当微电网并网运行时选取较小值的转动惯量J,孤岛组网运行时,为提供更多惯量而选择较大J,一方面延缓由于负载扰动引起的频率波动,另一方面为系统一次调频赢取足够的时间。
3 仿真分析
为验证所提控制策略的有效性,本文通过在Matlab/Simulink搭建图6、8所示的低压微电网仿真模型,分别对微电网孤岛和并网运行的情况进行仿真对比验证。仿真中主要参数如表1所示。
表1 VSG仿真参数Table 1 Simulation parameters of VSG
3.1 并网模式下转动惯量对VSG特性的影响
分析不同转动惯量对VSG并网输出特性的影响:VSG在1 s时经自同步并入电网,并以给定有功8 kW运行,图10为转动惯量不同条件下VSG输出的有功功率曲线。
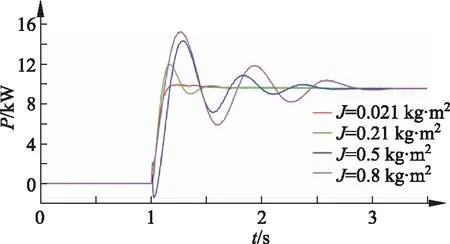
图10 转动惯量对VSG并网时输出有功功率影响Fig.10 Influence of moment of inertia on output active power when VSG is connected to grid
从图10中可发现,当J较小时VSG输出响应波动较小,当J=0.203 kg·m2时,输出功率震荡,经2 s后稳定,但震荡时系统超调很大,不利于系统运行。
实际上J=0.002 03 kg·m2和J=0.020 3 kg·m2时,VSG功率响应曲线差别不大,这是因为当J足够小时,VSG控制将转化为近似下垂控制,此时J对系统的影响将大大减小,这与前文分析结果一致。在并网模式下,大电网可提供足够的惯量,VSG则不需要设置较大的惯量值。
3.2 孤岛模式下转动惯量对VSG特性的影响
分析不同转动惯量对VSG组网时输出特性的影响:起始由VSG1单独带负载运行,VSG2空载运行,2 s时,VSG2通过自同步过程并入VSG1进行并联组网运行,4 s投入5 kW负荷,7 s时负荷切除,9 s时结束仿真。
仿真过程中,保持VSG2所有参数恒定,而J1选择不同的值。图11分别为VSG1转动惯量为0.020 3、0.203 kg·m2及J2为0.203 kg·m2时VSG1与VSG2输出有功功率和频率的变化曲线。

图11 转动惯量对VSG并联组网时输出特性的影响Fig.11 Influence of moment of inertia on output characteristics of VSG parallel networking
从图11中可看出,VSG组网并联运行时,随着J的增大,系统输出功率依然会出现震荡,但相对于并网运行J的取值可更大些,这与前文分析基本一致。一方面,微电网自身惯量较小,增大J可提高系统负荷扰动;另一方面,较大的J值可提高微电网运行的稳定性。因此,在VSG组网孤岛运行时需要设置合理的惯量,以提高微电网运行性能。
3.3 模式切换过程中VSG输出特性
与大电网相比,微电网作为新能源利用的有效方式,具有较强的灵活性,既可工作在并网模式也可孤岛离网运行。从前文分析可知,不同运行情况下微电网所需要的惯量不同,若采用恒定惯量控制则不能同时兼顾并网和孤岛运行。
为验证上述分析,设置仿真工况,VSG在1 s时并入电网,4 s时切除孤岛运行,图12、13为恒定惯量控制下VSG在模式切换过程中不同转动惯量时输出频率和功率的对比曲线。

图12 模式切换过程中VSG输出频率曲线Fig.12 VSG output frequency curve during mode switching

图13 模式切换过程中VSG输出功率曲线Fig.13 VSG output power curve during mode switching
从图12、13对比中可看出:微电网并网运行时较小的J可满足并网运行,避免功率震荡;但孤岛带负载运行时,负荷的波动会造成微电网频率和功率变化过快,对电网造成冲击。同理,较大的J能满足微电网孤岛运行,但并网时容易使系统出现震荡,不利于系统稳定运行。结合微电网不同模式运行特点,将VSG惯量特性设计成可根据微电网运行模式变化而变化的量,则可有效解决恒惯量控制难以适应微电网不同运行模式的问题。图14为自适应惯量控制下VSG输出频率及功率曲线。

图14 自适应转动惯量下VSG输出特性曲线Fig.14 VSG output characteristic curve under adaptive moment of inertia
从图14中可看出,通过在微电网模式切换过程中设置不同的惯量值可兼顾微电网不同模式下的运行性能,在并网时减小震荡风险,孤岛运行时当负荷出现波动能延缓系统频率突变,提高稳定性。
4 结论
本文在虚拟同步发电机控制的基础之上,对微电网不同运行模式下所需的惯量特性进行分析,主要工作和结论如下:
1) 分别建立VSG控制下微电网并网及孤岛运行小信号模型,并对转动惯量特性进行分析,发现并网条件下微电网小转动惯量可避免系统出现震荡的风险,而孤岛运行时较大转动惯量能延缓系统频率变化,改善微电网运行性能;
2) 通过对微电网系统小信号模型的分析可发现,当转动惯量很小时,VSG小信号模型将近似为2阶系统,此时VSG运行特性与下垂控制相似;
3) 在VSG运行模式切换中,通过J的改变可提高VSG的运行性能,可满足系统并网及孤岛稳定运行。
尽管本文分析了变转动惯量下的微电网模式切换运行,但并未考虑切换过程中VSG输出电压、电流情况,实际上由于并联系统交互耦合影响,各VSG输出电能质量问题也应当考虑。
