基于模糊PI控制器的改进MPPT算法
2019-09-10詹俊男
詹俊男,白 迪
(沈阳工程学院,辽宁 沈阳 110136)
0 引言
随着全球环境恶化以及传统发电日渐显现出弊端,微电网技术的需求逐渐提高。分布式电源(distributed generation,DG)在微网中分布广泛,主要有储能、光伏发电、风力发电、柴油发电机等。其中光伏发电与风力发电的输出功率极易受外界因素影响,功率输出随机,不能满足电网频率和电压的稳定性;光伏电源与储能属于直流电源,并网时只能依赖于桥式逆变器;柴油发电机的能量来源于柴油,经济性和环保性差。微网中光伏电源应用最为广泛,所以为提升光伏电源的输出效率,需要对其控制方式等进行优化。
1 研究背景及意义
DG是指靠近负荷端,功率由几kW到几十MW的小型发电机组。分布式发电是可满足用户的各种特殊需求,还能加大配电系统的经济型系统。其相对于传统大型发电厂而言,灵活性更强;但是分布式发电功率的随机波动性很强,并且还存在着较弱的故障穿越能力。IEEE P1574标准指出,若电力系统发生故障,分布式电源必须立刻退出运行[1]。为解决此问题并将DG的优势发挥到最大,电力部门提出了微电网概念。微电网是由DG、储能装置、电力电子监控保护装置等组成的,可与外界电力网连接或孤岛运行的能够自我控制管理的小型电力网[2]。按调频特性来分类,DG可分为有差调频电源、无差调频电源和无调频电源。一般情况下,无调频包括风力发电和光伏发电,典型的有差调频电源是采用下垂控制并以逆变器作为并网接口的储能电源。储能电源具有响应速度快的功率特性,比较适合负荷频繁变化的工作状况;无差调频电源有较为稳定的频率,例如柴油发电机和以恒压恒频控制方式的分布式电源。其中无调频电源必须与有差调频电源和无差调频电源混合使用,不许单独运行;有差调频电源和无差调频电源虽然都有支持电网的作用,但是一般情况下两者混合工作时的工作方式不是很理想,在维持电网的频率时,无差调频电源先进行出力,当到达无差调频电源的频率输出上限时,负荷才能转移到有差调频电源上由其进行补偿,二者无法进行协调工作来应对突变负荷[3]。
2 光伏电源的建模与控制
太阳能资源丰富、采用便捷,光伏发电安全可靠,无污染,不消耗能源,方便维护。由于太阳能发电的便携性和高效性,太阳能发电可应对不同的地理环境并广泛应用于军事作战中[4]。
2.1 光伏电源的模型
光伏发电利用光电效应,能量转换过程简单,没有传统发电机等设备的机械部件,不存在机械损耗,能量转换效率高达80%左右[5-6],不排放废物产生噪声等,其主要结构如图1所示。

图1 光伏发电系统Fig.1 Photovoltaic power generation system

图2 光伏电源等效电路Fig.2 Equivalent circuit of photovoltaic power supply
太阳能电池板是光伏发电的最小单元,电池板可串联或并联在支架上形成光伏发电方阵。蓄电池是光伏发电的储能单位,用来维持阴雨天等光照不充足时的系统供电。由于蓄电池的过充电和过放电都会对蓄电池的寿命造成损害,所以用来控制其充放电的控制器在含有蓄电池的光伏发电系统中必不可少;由于光伏发电的输出功率受天气、温度等外界因素影响较大,只有在特定的某个电压值下,光伏发电系统才会输出最大的功率,所以为保护负荷和维持高效稳定的电能输出等,控制器的最大作用是追踪光伏发电的最大功率输出点。光伏电源的直/交流逆变器与其他DG的逆变器没有本质上的区别,因为太阳能的不稳定性,逆变器一般采用恒功率控制。光伏发电的等效电路如图2所示。
图中:Iph为光生电流;Id为二极管的结电流;Rs为小于1 Ω的电阻;结电容Cj在分析中可不予考虑;Rsh为10 kV级的高阻值大电阻;a为二极管理想常数。由等效电路可推导出光伏电源的IV特性如下[7-8]:


图3 光复电源的特性曲线Fig.3 Characteristic curve of photoelectric complex powersupply
图3为光伏电源的IV、PV曲线,当电压较小时,电流保持恒定,随着调节负载组件的电阻值增大,电压不断增大,光伏电源的输出功率也逐渐增加。当电压增加到一定值时功率越过最大值,电压快速下降,最后衰减到0。由于光伏电源的功率特性曲线为单峰曲线,所以有且仅有1个最大功率点。光伏电源的非线性特性也要求其存在一种使其始终工作在最大功率点的方法[9-12]。
2.2 光伏电源的控制
光伏电源最大功率点跟踪(maximum power point tracking,MPPT)是一种自动寻优的算法,此方法先将光伏组件输出的电压电流采样输入到MPPT控制器中,再由控制器内存入的程序算法计算并控制光伏电源在最大功率点输出的电压和电流值[13]。
2.2.1 增量电导法
初始的MPPT算法受当时传感器、软件等技术影响,从太阳能电池组的外特性发现了最大功率点的电流和电压与其对应的开路电压Uoc和短路电流Isc之间均成一定比例存在,并将这种比例关系称为开路电压比例系数法和短路电压比例系数法,但是这两种方法并不能找到真正的最大功率点。后来随着电力电子器件技术的发展接踵出现了扰动观察法、定电压法、最优梯度法等,这些方法能追踪在光照条件改变下的最大功率点,但同时也有可能对环境变化误动,使功率点震荡,控制模式也较原始的MPPT技术复杂[13]。
增量电导法是一种可对光伏组件进行渐进式调整的控制方法,这种方法与上述方法相比的优点在于不需要实时计算,并且灵敏度高,随环境变化快。光伏太阳能电池阵列的输出功率P、输出电压U和输出电流I关系为P=UI。并且在最大功率点有如下关系[14-15]:
因此可推导出最大功率点应满足
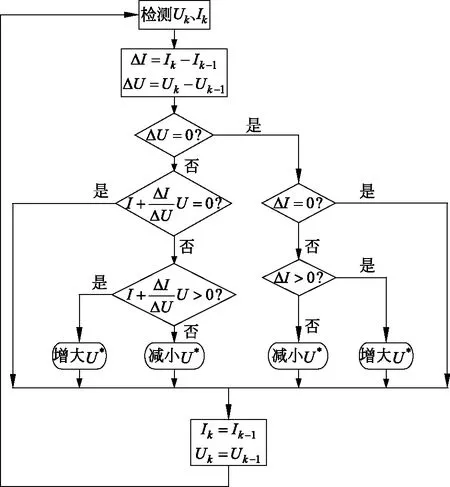
图4 增量电导法算法流程图Fig.4 Flow chart of incremental conductance algorithm
图4为增量电导法算法流程图,图中:Uk和Ik是太阳能电池阵列本次输出的电压、电流值,Uk-1和Ik-1是上一步输出的电压、电流值,U*为整流器的电压参考值。增量电导法的跟踪速度由步长决定:但是步长值过大时光伏输出会在最大功率点附近振荡,步长值过小时会降低光伏跟踪的效率,所以增量电导法的工作重点和难点在于步长的选择。由图3可知光伏电源的功率曲线是一条单峰曲线,在峰值处dP/dU=0,即可得到[16-17]
式中G为电导,dG为其增量。由此,光伏电源的工作状态可根据G+dG来判断。由图4可见,增量电导法的计算量较大。本文将增量电导法与PI控制法相结合,可大幅减少增量电导法的计算量。
2.2.2 PI控制器设计
在没有加入PI控制器时,光伏电源的低频段增益较小,进而影响了系统的快速稳定。为解决此问题,本文将PI控制器中加入模糊控制,提前将技术数据、现场经验和PI参数等汇编为程序存入计算机中[18-19]。
模拟控制器的两个输入量分别为
式中:Pk为功率误差;ΔP′k为误差变化。经过模糊控制器运算后就可得出实时的ΔKp和ΔKi,从而加快PI控制器参数调整。
模糊自适应的PI控制器结构图如图5所示,图6为加入模糊PI控制器的增量电导法的算法流程图。
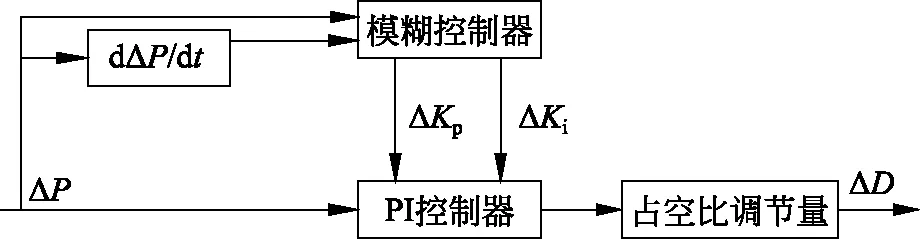
图5 模糊自适应的PI控制器结构Fig.5 Fuzzy adaptive PI controller structure

图6 加入模糊PI控制器的增量电导法Fig.6 Incremental conductance method with fuzzy PI controller
与PI控制器相结合的增量电导法可提升传统增量电导法的性能,提高运算速度。结合PI控制器的增量电导法,将本次测量的电流电压值与上一次的相减得到相应的增量,再通过相应的数学关系式计算出增量电导dG。PI控制器有效地减小了静差,使光伏模块不在Pmax处振荡。与传统增量电导法相比,加入PI控制器之后运算结构简单,实时性比较强,还具有步长自适应调节的作用,解决了传统算法选择步长困难的问题。
2.2.3 仿真分析
为验证PI控制器的可行性,本文利用Matlab模拟由PI控制器、光伏阵列和Boost电路组成的光伏发电系统,并根据光伏电源的数学模型进行仿真。图7为仿真电路的原理图,其中光伏阵列用直流电源等效表示。

图7 仿真电路原理图Fig.7 Simulated circuit schematic diagram
分析图7,光伏阵列的输出电压、电流经检测后送入MPPT功率控制器中,实现最大功率点的跟踪。仿真条件为:占空比设为1,光伏阵列在25 ℃环境下光照强度200 W/m2时运行10 s。由图8所示仿真波形图可看出,加入模糊PI控制器后的MPPT可更快速稳定地找到最大功率点。

图8 仿真波形图Fig.8 Simulated waveform

图9 陡增光照后的仿真波形图Fig.9 Simulated waveform aftersteep illumination
为证明本文提出观点的优越性,在仿真过程中将光照强度增强为400 W/m2,仿真波形如图9所示。由仿真波形可看出:加入了PI控制器的增量电导法与传统方法相比,可以更快速稳定地寻找最大功率点,即使环境突然改变时也有较好的适应性。
3 结论
根据光伏电源的特性,为保护负荷和维持高效稳定的电能输出需寻找光伏电源的最大功率点,传统策略中增量电导法存在选择步长困难、计算量较大和实时性较差等缺点。本文基于增量电导法,在此方法中加入基于模糊控制的PI控制器,明显缩短了最大功率点的追踪时间,有较强的实时性,也在一定程度上解决了传统增量电导法选择步长困难的问题。