基于TDC7200的超声测温系统设计
2019-09-10周新志白兴都
崔 岢,周新志,白兴都
(四川大学电子信息学院,四川成都 610065)
0 引言
在燃烧、干燥和加热等工业领域,温度场的分布反映了设备和材料的内部状态,是非常重要的信息[1]。采用接触式的测量方式可以测量一个点的温度,但对一个面甚至一个空间的温度采集还存在许多可以改进之处[2]。基于超声波的非接触式测温方法,具有抗干扰性和指向性好、测量范围广、环境适应性强、实时连续等特点[3-5],特别适合空间温度场的测量。
目前对声波温度场测量及重建的研究,主要是在对温度场重建算法的设计与改进,实时的声波时间测量大都为μs级的测量精度[6-8]。提高声波时间的测量精度可以有效提高重建温度场分布梯度的精度,故本文重点研究高精度的声波温度测量系统的设计与实现问题。
1 超声测温的基本原理
由波动方程和热力学方程能够得出超声波传播速度和介质温度的函数关系,在空气中两者的关系为[8-10]
(1)
式中:v为超声波在介质中传播的速度,m/s;R为气体常数;γ为气体的绝热数,J / (mol ·K);M为气体摩尔质量,kg/mol;T为气体热力学的温度,K。

(2)
式中:在确定的介质中Z是固定常数,空气中Z的值一般取20.03[1]。
因此,通过测量固定距离声波传输时间得出声波的传输速度即可确定出该声波路径上空气的温度。
2 超声温度测量系统硬件设计
测量系统由控制模块、电源模块、时间测量单元(TDC7200)、控制收发单元及数据处理单元组成,其结构如图1所示。

图1 超声温度测量系统硬件图
控制模块由STM32构成,控制各个芯片和与上位机通讯。TDC7200和TDC1000组合用以测量超声波的飞行时间。通过TDC1000完成超声波探头收发配置(放大、整形等),采用TDC7200进行时间测量(1 ns精度)。以TDC1000为核心配合复用芯片和升压电路组成控制收发单元选择驱动超声波收发器。采用串口将收到的时间数据传送到上位机即数据处理单元,通过上位机完成测量数据的筛选处理与温度场重建。
2.1 时间测量单元
测温系统的时间测量单元以TDC7200为核心实现高分辨率时间的测量。TDC7200每次可以测量5个停止脉冲,显著提高数据的采集效率。而且,TDC7200有两种测量模式,测量范围分别为0.012~0.5 ms 和0.25~8 ms,分辨率为55 ps,功耗为0.5 μA[11]。本测量系统的时间间隔在3~6 ms之间,故采用模式2工作方式。
在此模式下,芯片内部振荡器和外部的时钟都参与工作,内部的振荡器进行精确的时间测量,而外部的时钟进行比较粗略的时间测量。TDC7200在模式2下工作时序如图2所示,在start脉冲的上升沿到达时内部振荡器开始计时,在随后的时钟上升沿来临时关闭振荡器同时外部的时钟开始计时,接收到stop信号后,内部振荡器重新开始计时,对stop脉冲上升沿和随后的第一个外部时钟的上升沿之间的时间段进行计时[12]。TDC7200外围电路设计如图3所示。

图2 TDC7200模式2的工作时序图

图3 TDC7200外围电路设计
2.2 控制收发单元
系统采用40 kHz超声波进行温度测量。驱动单元以TDC1000为核心进行设计。TDC1000中有2个可以自动切换的超声波测量通道,可以驱动频率为31.25 kHz到4 MHz的超声波换能器。同时其内部集成了低噪声放大器和可编程的增益放大器,增益分别可达20 dB和21 dB。采用TDC1000控制超声波接发,可以满足系统对微弱回波的检测和放大。因此相比常规的超声波控制收发电路更加简单可靠[10],测量范围更大。
采用5 V的电压直接驱动超声波换能器收发的波形幅度值很低,很容易受到杂波影响导致测量出现很大的误差。因此,本系统将电压提升到30 V来驱动超声波换能器,促使收发波形增强并极大地提高了测量的精度和准确率。
3 系统软件设计
系统的主程序流程图如图4所示,包含系统初始化,I/O口初始化,初始化时间测量与超声收发单元,数据处理和温度场重建等。

图4 超声温度场测量流程
上位机发出启动指令后,TDC1000根据控制器发出的指令,发出超声波激励信号,同时将起始的脉冲信号发送给TDC7200,单片机接收到足够的时间数据后将数据发给上位机进行温度重建。
4 系统校正
温度场重建会受到很多因素的影响,对于每条路径的时间测量精度也会受到很多因素影响,如实际的安装距离、气体的纵向流动和横向流动、探头的朝向、杂波的干扰等[13-16]。本系统对影响因素提出了相应的解决方法。
(1)两个超声传感器之间的安装距离难以精确确定,会对声波的速度计算带来一定的误差。因此在均匀温度场中需要对超声法温度场测量系统进行标定,以记录测量时间与理论时间的偏移量。当温度场变化时,将偏移量叠加到测量的时间上。
(2)考虑空气会因温度升高而扩散从而导致气体横向流动,因此系统中通过测量一条路径上的正向传播时间与反向时间取平均,这样可以有效降低气体横向扩散带来的影响,即:
Tofk=(Tof正向+Tof反向)/2
(3)
式中Tofk表示第k条路径。
(3)实际测量时气体纵向流动将导致超声信号幅度增加,如图5所示,产生的stop信号也由stop1移动到stop2。考虑测量系统超声波频率为40 kHz,故stop1与stop2时间差为25 μs,通过时间平移即可抵消气体纵向流动对时间测量产生的影响。
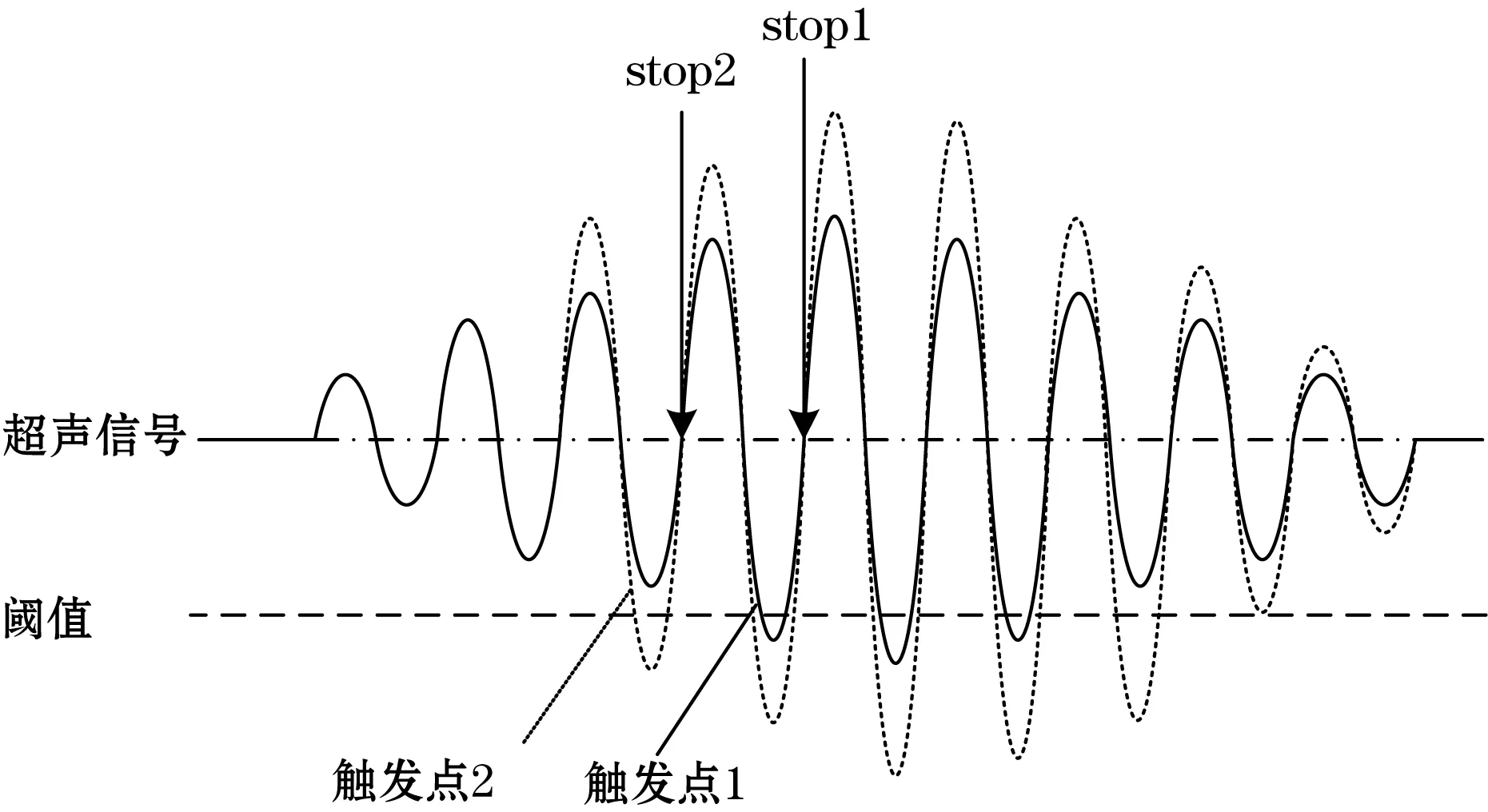
图5 气体纵向流动对stop信号影响
(4)考虑不同路径超声波探头的朝向不同,接收信号强度不同,因而需设置不同的门限值以提高测量的准确率。
5 系统测试
超声温度场重建探头与路径布置种类很多,采用其中一种进行实验与测试,布置方式如图6所示,其中黑点表示探头位置,组成12条路径用于温度场重建。图7为实验环境实物布置图,采用电炉做为热源,在1.2 m×1.2 m的二维平面进行温度场重建。

图6 探头与路径图
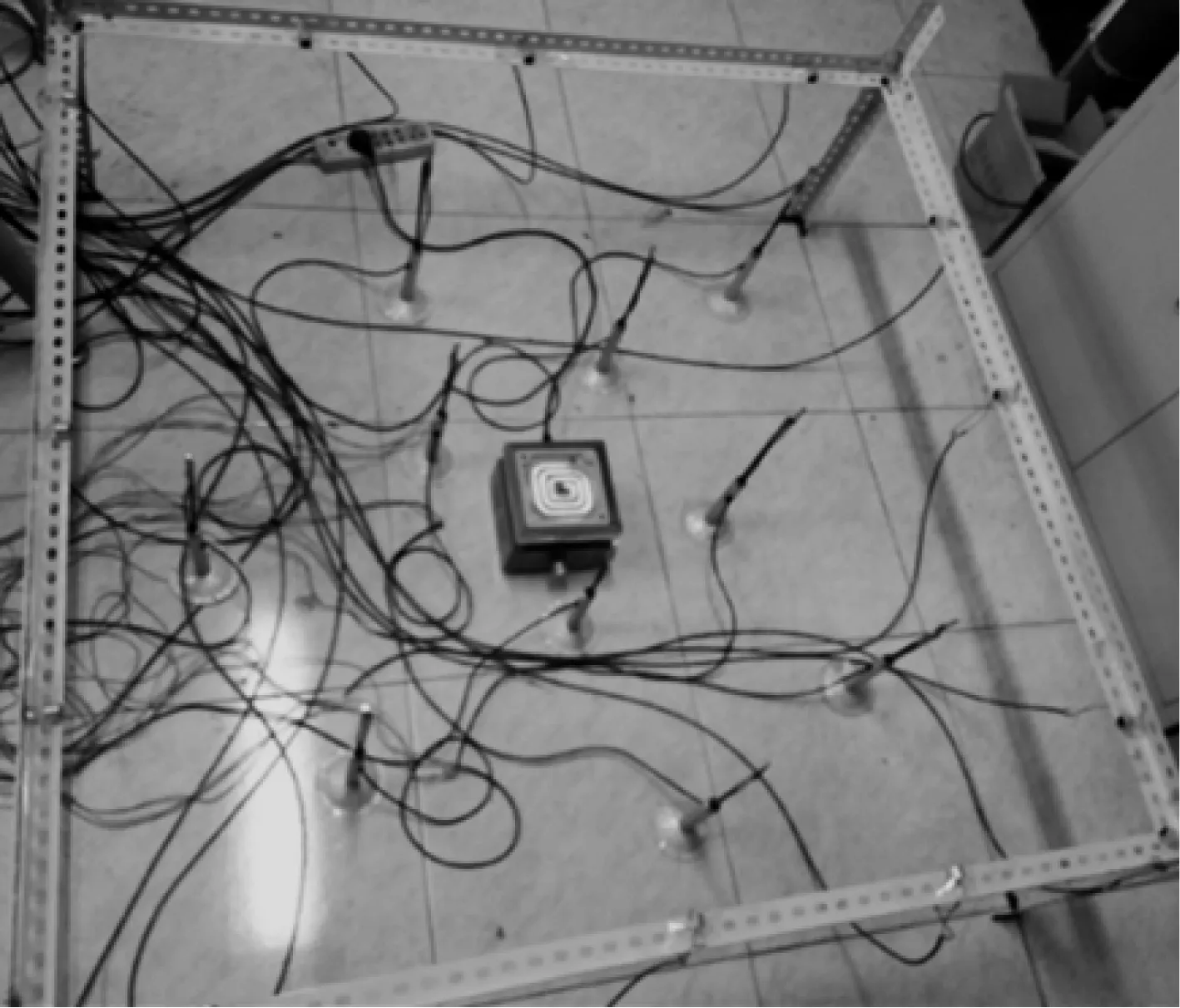
图7 实验环境实物布置图
单路静态时测量100组数据,数据静态调整前后对比见表1,调整后标准差稳定在250 ns左右。图8为其中一组的数据,可以看出100组数据大部分都在3.576 7 ms左右,通过初步处理后采集的时间数据,平均值为3 576 741.30 ns,100组的标准差为254.31 ns,所测试的距离为1.2 m,温度约为13 ℃。

表1 单路径静态调整前后对比 ns

图8 初步筛选后的数据
用MTALAB对数据进行进一步的筛选处理,采用最小二乘算法加插值进行温度场重建,由图9和图10可以看出通过测量与重建可以准确反映出温度趋势,当热源位置变化时能够通过重建出的温度场反映温度场的变化。选取温度场中5个点用DS18B20采集出实际的温度,与重建出的对应点温度对比,见表2与表3。

图9 热源中心的温度场

测试点重建温度/K实测温度/K差值/K相对误差/%1289.45291.0-1.550.53262293.94293.90.040.01363312.32312.30.020.00644310.70312.4-1.700.54425289.48291.1-1.620.5565

图10 热源偏置中热的温度场

测试点重建温度/K实测温度/K差值/K相对误差/%1288.82290.8-1.980.68092304.75301.92.850.94403300.42298.51.920.64324298.34295.82.540.85875291.33291.8-0.470.1611
6 结论
本文实现了高分辨率超声温度场测量系统的设计,其声波传播时间测量达到ns的精度。由于整个系统高度集成,测量单组数据耗时约10 ms,能够高效、稳定地完成温度场测量。通过对影响声波传播的因素分析,在系统中实施了相应的修正方法,有效地提高了时间测量的准确率与精度,为空间温度场的重建提供了有效的测量数据。
