基于DELMIA的机器人工作站仿真研究
2019-09-10贺金鑫
贺金鑫





摘 要:本文利用DELMIA软件模拟机器人工作站,观察机器人工作站的整体情况,查看机器人运动轨迹和零部件的运动动作,检查工作站运行时的干涉情况,并针对出现的问题提出解决方案,及时改进机械结构和整体布局,以提高工作站的生产效率。
关键词:DELMIA;机器人仿真;路径优化;干涉检测
中图分类号:TP242 文献标识码:A 文章编号:1003-5168(2019)01-0008-03
Simulation Application of Robot Workstation Based on DELMIA
HE Jinxin
(Harbin University of Technology Robot Group (Harbin) Huacui Intelligent Equipment Co., Ltd.,Harbin Heilongjiang 150036)
Abstract: In this paper, DELMIA software was used to simulate the robot workstation, observed the overall situation of the robot workstation, viewed the robot's trajectory and the movement of parts, checked the interference during the operation of the workstation, and solved the problems, improved the mechanical structure and overall layout in time, so as to improve the productivity of the workstation.
Keywords: DELMIA;robot simulation;path optimization;interference detection
随着企业用工成本不断增加和机器人应用技术不断成熟,机器人工作站逐渐接替了一些劳动强度大、动作单一的工作,如码垛、搬运、喷漆、焊接、打磨抛光和自动化装配等。但是,由于不同的生产企业往往采用不同的生产工艺,因此,对机器人的动作要求也就不同。在设计机器人工作站時,为了保证不同企业生产工艺和验证设计的合理性,需要模拟仿真机器人工作时的路径轨迹和其他零部件的运动状态,优化机器人运动轨迹和工作站整体布局,从而提高设计质量,降低设计和制造成本。
1 DELMIA的仿真功能
达索公司的DELMIA是一款互动制造应用软件,应用于数字化企业,其通过PPR hub把工艺任务、产品、资源联系起来,通过DELMIA/Robotics模块规划机器人工作时的运动轨迹和零部件的机械运动。弧焊时,机器人与变位机相对配合运动。DELMIA在Workcell Sequencing模块中编辑、分配、排列工艺任务,模拟工作站工作时真实的工作流程,检查机器人运动时与零部件之间的干涉情况。
2 机器人工作站仿真步骤
仿真前,用三维软件设计完成工作站的零部件模型。CATIA模型可以直接导入DELMIA。三维软件可以通过中间格式stp或igs导入,用相应的模块给零部件添加运动机构,摆放零部件在工作站中的位置,规划机器人的运动轨迹,分配排列工艺任务,检查零部件的干涉情况,完成工作站的虚拟仿真。
2.1 零部件运动机构的建立
仿真前,把零部件导入DELMIA,并添加零部件的运动机构,如旋转、平移等。在“Device building”模块中,给导入的模型添加运动机构(如图1所示),如焊钳的闭合与打开、夹具或抓手的夹紧和张开、滑台滑块的滑动、气缸的伸缩和变位机的旋转等,并使用“Home Position”命令为模型添加机构的初始位置,如零点和极限位置等。如果模型是机器人的末端执行器,则需要添加基础坐标和工具坐标。必要时,还要在夹具或其他模型上添加引导抓手的设计坐标,最后以“.CATproduct”的格式保存。
<F:\欢欢文件夹\201904\河南科技201901\河南科技(创新驱动)2019年第01期_103595\Image\image1.png>
图1 建立运动机构
2.2 机器人工作站的整体布局
该步骤是将零部件模型和机器人模型添加到productlist或resourcelist的设计树中。DELMIA的资源库包含了大量机器人厂商的模型。通常来说,机器人模型可以从资源库中直接导入,具体实施步骤如下:首先使用set tool命令把机器人的末端执行器安装到机器人上,调整模型的坐标值或拖拽指南针的6个自由度修改模型所在的位置。然后使用“Layout Tools”工具栏添加模型之间的相对位置关系和模型之间的父子关系,使用“Robot Controller”为机器人添加其他属性,如增加机器人的工具坐标、设定机器人的外部轴、运动属性等[1]。
调整好机器人的工作站后,检查模型之间是否有干涉,并留出人工操作的空间和行走通道,以方便日后维护。此外,还要注意机器人到机器人控制柜的距离不得大于机器人的线缆长度。
2.3 工作站机器人的运动轨迹仿真
在define task definition模块中规划机器人的运动轨迹和末端执行器的动作,如焊枪或抓手的开闭,搬运工件时的运动轨迹,滑台带动机器人平行移动动作的模拟,使用“Robot Management”工具栏规划机器人的行走路径。“Teach a device”命令的作用是示教机器人路径和动作,通过拖拽机器人的工具坐标或调整机器人各个轴的角度,使机器人到达指定的位置后,在“Teach”对话框添加路径点[2]。添加的路径点有两种:Via经过点和process工艺点(见图2)。
<F:\欢欢文件夹\201904\河南科技201901\河南科技(创新驱动)2019年第01期_103595\Image\image2.png>
图2 配置processg工艺点
当机器人抵达经过点时,机器人的末端执行器不产生动作。在工艺点中,可以添加机器人末端执行器的动作,如点焊、抓取、更换末端执行器等动作。根据实际情况,还可以把机器人行走的路径设置成关节运动、直线运动、弧线运动等。按机器人轨迹的先后顺序添加路径点。然后点击“Sim Frame”中的运动按钮,观察机器人行走的运动轨迹。若发现有机器人的运动轨迹和工作姿态不合理,可通过插入中间点或调整末端执行器角度的方法来解决。此外,DELMIA还提供用于弧焊的“Arc Welding”模块,可以生成用于弧焊的连续焊缝和机器人与变位机协同工作的运动模拟。规划运动轨迹时,要特别注意管线包与周边设备的空间,以免出现干涉和剐蹭[3]。
观察机器人运动轨迹的同时,还应观察机器人各个轴运动的角度。如果机器人在某一运动位置非常接近极限行程,应调整机器人的运动姿态或与零部件的摆放位置,甚至修改模型的结构尺寸。
2.4 工作站工艺流程的建立
为了使机器人工作站按实际生产过程执行多个连续的运动程序,应使用Workcell Sequencing(工作单元排列模块)在ProcessList下添加工艺任务、分配资源程序、排列工艺流程。操作步骤如下。
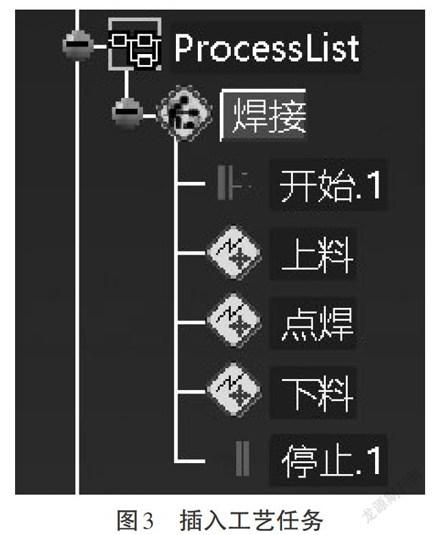
①使用“insert activity”命令在ProcessList下插入工艺任务(见图3)。
<F:\欢欢文件夹\201904\河南科技201901\河南科技(创新驱动)2019年第01期_103595\Image\image3.png>
图3 插入工艺任务
②使用“Assign a resource”把带有程序的资源分配到工艺任务中,然后用“set an active task”命令把资源的程序分配给工艺任务(见图4)。
<F:\欢欢文件夹\201904\河南科技201901\河南科技(创新驱动)2019年第01期_103595\Image\image4.png>
图4 分配工艺任务
③点击“Open PERT Chart”命令进入排列工艺顺序的界面,按实际的工艺流程将各个工艺任务依次连接起来。排列工艺任务见图5。
<F:\欢欢文件夹\201904\河南科技201901\河南科技(创新驱动)2019年第01期_103595\Image\image5.png>[开始./][停止./][下料][点焊][上料]
图5 排列工艺任务
排列好工艺流程后,结合“Data View”工具栏的甘特图命令,可以直观显示每个工艺流程所用的时间。适当优化机器人工作路径和减少辅助动作,可以提高机器人工作站的工作效率。
查看设计好的工艺流程应使用“Simulation”工具栏的Process Simulation命令。直观地模拟机器人执行焊接、搬运、滑移、更换末端执行器时的连续动作,打开“Automatic Real-time Simulation On/Off”开关,机器人工作站会按设定好的运动速度运行,这样呈现在屏幕上的虚拟仿真会更加真实。
3 碰撞干涉检查
由于机器人工作站的空间狭小,极有可能出现机器人与其他零部件(工件、底座 夹具等)发生运动干涉或机器人与机器人之间的碰撞[4]。DELMIA的Simulation analysis tools工具栏提供检测碰撞干涉的功能。在使用碰撞干涉检查时,首先在“Clash”命令设定干涉检测的方式(如图6所示)。其次,在“Analysis Configuration”选择配置好的干涉类型和干涉发生时的显示状态,然后打开“mode analysis on/off”干涉检查开关,如果运行仿真时发生了干涉,那么DLEMIA会根据预先的设定做出相应的反应,如停止仿真运动或突出显示干涉的零件。在发生碰撞干涉的地方,可以调整工作站的布局,优化机器人运动路径和工作姿势,或修改模型尺寸。经过多次仿真运行和修改调整直至没有碰撞干涉提示,就可以将运动仿真以动画的形式输出保存。这样就完成了工作站的碰撞干涉检查工作。
<F:\歡欢文件夹\201904\河南科技201901\河南科技(创新驱动)2019年第01期_103595\Image\image6.png>
图6 检查干涉条件
4 结语
本文利用DELMIA对机器人工作站的布局和机器人路径规划进行仿真,直观模拟机器人工作站中机器人运动轨迹和设备之间的摆放位置,避免机器人与设备之间的干涉[5]。
参考文献:
[1]林巨广,樊晓光,李体振.基于DELMIA焊装线工艺规划与仿真验证[J].组合机床与自动化加工技术,2013(4):106-109.
[2]王茜,徐志刚,白鑫林,等.基于DELMIA的弹药填充机器人工艺仿真及优化[J].控制工程,2016(S1):73-78.
[3]陈世钟,宋健,黄卓,等.DELMIA在机器人生产线仿真中的应用[J].机械制造与自动化,2016(4):157-160.
[4]严隽琪,范秀敏,马登哲.虚拟制造的理论、技术基础与实践[M].上海:上海交通大学出版图,2003.
[5]王家海,庞旭旻.基于DELMIA/Robotics的白车身焊接机器人路径仿真研究[J].机电产品开发与创新,2009(1):6-7.
