飞思卡尔智能车路障算法控制
2019-09-10张秀才
张秀才
摘 要:为了能够使智能车快速、准确、稳定的检测和通过路障,本文依据MK60DN512ZVLQ10微控制系统介绍了在检测路障时距离传感器、姿态方位传感的选择;把智能车通过路障过程分为四个阶段分别对应智能车所处于不同的位置分别进行控制的算法,提升了智能车通过路障的平顺性。
关键词:智能车;算法控制;传感器
一、引言
随着社会的的发展,智能汽车的研究成为人们的一个热点。智能汽车需要具有环境感知、环境特征元素的的识别、路径的自动规划的能力。本文以飞思卡尔智能车竞赛为背景,以MK60DN512ZVLQ10微控制系统为核心,对赛道元素中出现的路障元素进行准确的识别和路径规划,进而达到准确识别、快速响应、准确通过的目的。
二、传感器的选择
(一)测距传感器
使用GP2Y0A21YK0F测量距离传感器模块。该种传感器由PSD、IRED、信号处理电路三部分组成。采用三角测量方式,所以被测物体的材质、环境温度以及测量时间都不会影响传感器的测量精度。传感器通过把距离障碍物的距离的远近转化成电壓的大小,电压的大小与障碍物的远近在的测量范围呈线性的关系。所以智能车在行驶时通过单片机上的ADC模块采集传感器反馈回来电压大小来近似的模拟智能车距离障碍物远近。
(二)姿态传感器
使用mma8451+mpu3050型号的三轴加速度+三轴陀螺仪传感器来测量智能车的姿态。姿态传感器的轴垂直于地面向上,轴的方向垂直于智能车车身,轴的方向是车身的方向。所以通过对轴方向的角速度进行积分得到在轴方向移动的角度,通过计算出来的角度就可以知道智能车与车身方向之间的夹角。
三、控制算法
首先在智能车上安装两个测距传感器和一个姿态传感器。两个测距传感器分别安装在汽车的前面和侧面,姿态传感器安装在汽车的中心位子来测量汽车与车身之间的夹角。
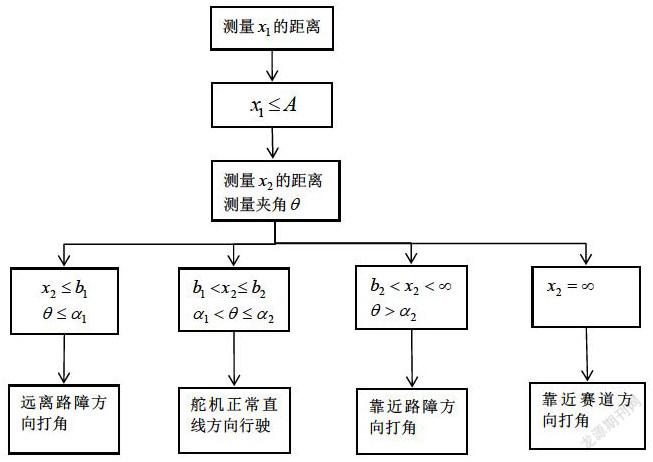
MK60DN512ZVLQ10微控制系统通过ADC模块采集安装在智能车前面测距传感器反馈回来的电压值的大小来估算当前智能车所距离障碍物的距离。当测量的距离小于你设定的阈值时,这时智能车的舵机开始动作,同时智能车侧面的测距传感器和姿态传感器开始工作。侧面的测距传感器测量智能车距离路障的距离,姿态传感器测量智能车与车身之间的夹角。当的距离小于等于,角度小于时,这时智能车距离路障的距离比较近,此时舵机的动作是远离路障的方向进行打角;当的距离大于小于等于,角度大于小于时,这时智能车距离路障比较合适的位置,此时舵机的动作是保持直线的方向进行打角;当的距离大于小于无穷大时,角度大于时,这时智能车距离路障比较远的距离,此时舵机的动作是靠近路障方向打角;当的距离为无穷大时,说智能车已经经过路障,此时智能车需要回线处理。此时舵机的动作靠近赛道方向进行打角,当汽车检测到赛道之后根据电感检测到的大小进行正常的行驶。具体流程图如下
四、结束语
本文根据姿态传感器、测距传感器的具体安装位置以及测量范围从而选择了GP2Y0A21YK0F红外测距传感器和mma8451+mpu3050姿态方位传感器,以及针对智能车所处于的不同情况进行不同的处理方法,根据调试结果说明该控制算法是可行的。
参考文献
[1]卓晴.学做智能车:挑战“飞思卡尔”杯[M].北京:北京航天航空大学出版社,2007
[2]邵贝贝.单片机嵌入式应用的在线开发方法[M].北京:清华大学出版社,2004
[3]第六届“飞思卡尔”杯大学生智能汽车竞赛北京科技-电磁二队技术报告,2011,8.
[4]张毅刚,彭喜元.单片机原理与应用设计[M].北京:电子工业出版社,2010,59C7D7050-EDAE-49E0-8CE9-181469703361
