一种四自由度串联采摘机械臂系统设计
2019-09-10王勇刘群铭史颖刚
王勇 刘群铭 史颖刚
摘 要:為提高番茄采摘效率,降低番茄生产成本,本文设计了一种四自由度串联采摘机械臂系统。在设计过程中,笔者首先确定关节型机械臂构型,分析机械臂各杆长和工作负载,完后各关节电机选型;然后设计控制系统以及无刷电机控制流程;最后搭建实物样机,控制各关节的电机将末端执行器送到成熟番茄的位置完成采摘任务。
关键词:番茄采摘;四自由度;串联机械臂;无刷电机
中图分类号:TP241 文献标识码:A 文章编号:1003-5168(2019)19-0027-03
Abstract: In order to improve the efficiency of tomato harvesting and reduce the production cost of tomatoes, a Four-Degree-of-Freedom series harvesting manipulator system was designed in this paper. In the design process, the author first determined the configuration of the articulated manipulator, analysed the length and workload of the manipulator, and then choosed the type of the articulated motor; then designed the control system and the control flow of the brushless motor; finally, a prototype was built to control the motor of each joint to send the end-effector to the position of mature tomato to complete the picking task.
Keywords: tomato picking;four degrees of freedom;series manipulator;brushless motor
番茄可用于鲜食和深加工,在中国鲜食番茄产量占比高达90%[1]。其中,用于深加工的番茄采摘已经实现了机械化,而用于鲜食的番茄由于采摘难度大仍未实现机械化。目前,在中国参加鲜食番茄生产的劳动力主要是老人和妇女,工作效率较低。由于番茄采摘期较短,采摘作业效率不高,会导致部分番茄腐烂,影响番茄产量和质量。鲜食番茄采摘费时费力,其投入的劳动力占整个番茄生产环节劳动力投入的50%~70%[2]。随着社会的进步,人工采摘成本不断提高,而采摘成本则会在更大程度上影响鲜食番茄的市场价值。本文主要基于农业机器人技术,针对标准化温室番茄采摘自动化问题,设计一种四自由度串联采摘机械臂系统。
1 机械系统设计
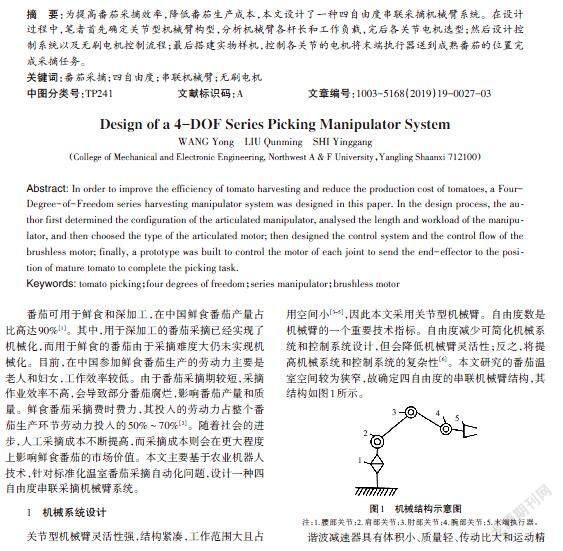
关节型机械臂灵活性强,结构紧凑,工作范围大且占用空间小[3-5],因此本文采用关节型机械臂。自由度数是机械臂的一个重要技术指标。自由度减少可简化机械系统和控制系统设计,但会降低机械臂灵活性;反之,将提高机械系统和控制系统的复杂性[6]。本文研究的番茄温室空间较为狭窄,故确定四自由度的串联机械臂结构,其结构如图1所示。
谐波减速器具有体积小、质量轻、传动比大和运动精度高等特点。同时,交流电机、步进电机和无刷电机目前被广泛应用于机器人设计制造。其中,交流电机扭矩大但需要交流电源,不适用于农业机器人;步进电机精度高,但不能对其进行力矩控制;无刷电机寿命长、噪声低、调速性能好。因此,本文设计的四自由度的串联机械臂的腰部关节电机、肩部关节电机、肘部关节电机均使用无刷电机加谐波减速器驱动。舵机具有体积小、扭矩大、易于控制的特点,广泛应用于机器人控制。因此,本文设计的四自由度的串联机械臂的腕部关节和末端执行器电机使用舵机驱动。
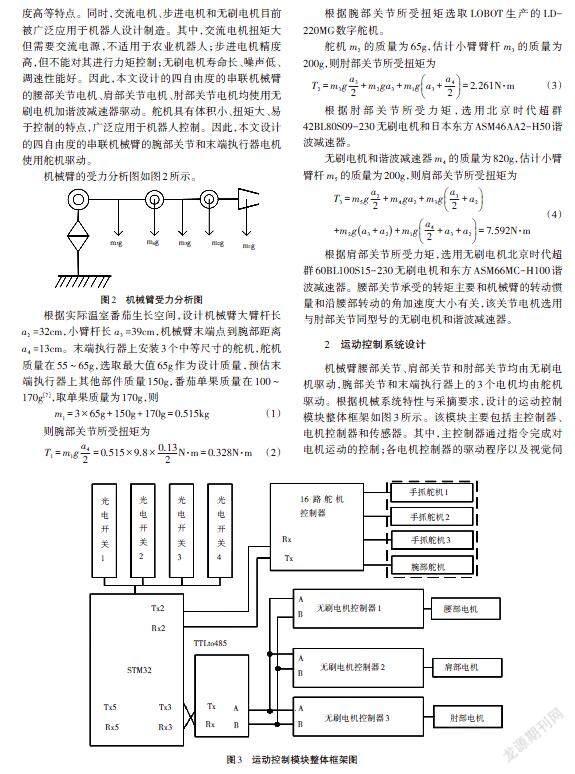
机械臂的受力分析图如图2所示。
根据实际温室番茄生长空间,设计机械臂大臂杆长[a2]=32cm,小臂杆长[a3]=39cm,机械臂末端点到腕部距离[a4]=13cm。末端执行器上安装3个中等尺寸的舵机,舵机质量在55~65g,选取最大值65g作为设计质量,预估末端执行器上其他部件质量150g,番茄单果质量在100~170g[7],取单果质量为170g,则
(1)
则腕部关节所受扭矩为
(2)
根据腕部关节所受扭矩选取LOBOT生产的LD-220MG数字舵机。
舵机[m2]的质量为65g,估计小臂臂杆[m3]的质量为200g,则肘部关节所受扭矩为
(3)
根据肘部关节所受力矩,选用北京时代超群42BL80S09-230无刷电机和日本东方ASM46AA2-H50谐波减速器。
无刷电机和谐波减速器[m4]的质量为820g,估计小臂臂杆[m5]的质量为200g,则肩部关节所受扭矩为
(4)
根据肩部关节所受力矩,选用无刷电机北京时代超群60BL100S15-230无刷电机和东方ASM66MC-H100谐波减速器。腰部关节承受的转矩主要和机械臂的转动惯量和沿腰部转动的角加速度大小有关,该关节电机选用与肘部关节同型号的无刷电机和谐波减速器。
2 运动控制系统设计
机械臂腰部关节、肩部关节和肘部关节均由无刷电机驱动,腕部关节和末端执行器上的3个电机均由舵机驱动。根据机械系统特性与采摘要求,设计的运动控制模块整体框架如图3所示。该模块主要包括主控制器、电机控制器和传感器。其中,主控制器通过指令完成对电机运动的控制;各电机控制器的驱动程序以及视觉伺服控制的控制程序均在STM32单片机中运行。
STM32单片机作为主控制器,其串口3通过一个TTL to485模块将电平转换至485电平,进而作为485总线上的主机控制3个无刷电机控制器,驱动3个无刷电机。STM32单片机通过串口2与16路舵机控制器通信,进而控制手爪及腕部的4个舵机运动。另外,用于机械臂复位的3个红外光电开关以及手爪上的1个红外光电开关与主控制器的IO口直接相连。
控制机械臂完成采摘动作的关键在于无刷电机的控制,由此,设计单个无刷电机转速控制的程序流程,如图4所示。首先创建一个一维数组存放一帧数据。为避免电机因速度过大而发生意外,控制电机速度在-700~700Hz/s。其次,根据所控无刷电机控制器地址、电机速度配置数组前六位,通过CRC校验函数返回值配置数组后两位。再次,将配置好信息的数组通过串口发送到485总线上。最后,等待接收控制命令,当接收到从机回传码时,程序运行结束。
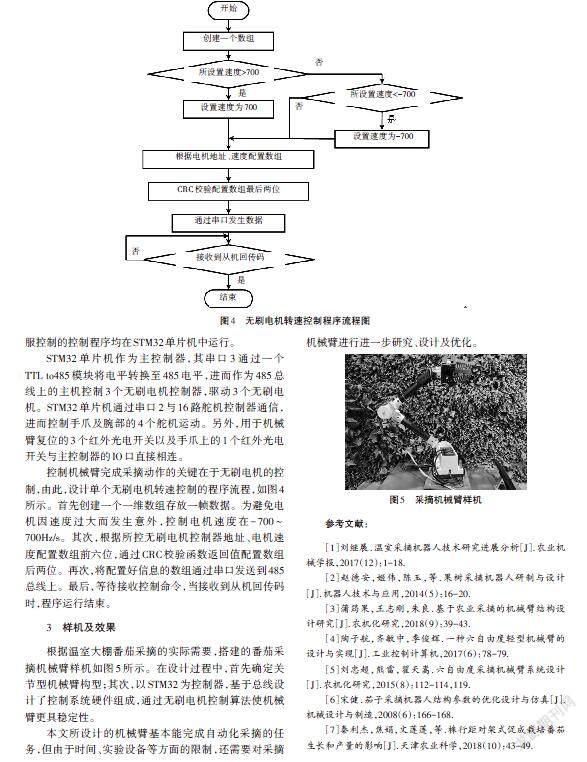
3 样机及效果
根据温室大棚番茄采摘的实际需要,搭建的番茄采摘机械臂样机如图5所示。在设计过程中,首先确定关节型机械臂构型;其次,以STM32为控制器,基于总线设计了控制系统硬件组成,通过无刷电机控制算法使机械臂更具稳定性。
本文所设计的机械臂基本能完成自动化采摘的任务,但由于时间、实验设备等方面的限制,还需要对采摘机械臂进行进一步研究、设计及优化。
参考文献:
[1]刘继展.温室采摘机器人技术研究进展分析[J].农业机械学报,2017(12):1-18.
[2]赵德安,姬伟,陈玉,等.果樹采摘机器人研制与设计[J].机器人技术与应用,2014(5):16-20.
[3]蒲筠果,王志刚,朱良.基于农业采摘的机械臂结构设计研究[J].农机化研究,2018(9):39-43.
[4]陶子航,齐敏中,季俊辉.一种六自由度轻型机械臂的设计与实现[J].工业控制计算机,2017(6):78-79.
[5]刘忠超,熊雷,翟天嵩.六自由度采摘机械臂系统设计[J].农机化研究,2015(8):112-114,119.
[6]宋健.茄子采摘机器人结构参数的优化设计与仿真[J].机械设计与制造,2008(6):166-168.
[7]秦利杰,焦娟,文莲莲,等.株行距对架式促成栽培番茄生长和产量的影响[J].天津农业科学,2018(10):43-49.
