基于Arduino的智能滑板
2019-06-11蔡嘉禹林楷涛陈俊填许志明万智萍
蔡嘉禹 林楷涛 陈俊填 许志明 万智萍
摘要:滑板运动作为极限运动的鼻祖以其超越身心极限的快感与极其自由的运动等特点,在欧美各国里成为了城市青少年最持久、最流行的时尚。但由于它使用的是传统的人力驱动,对使用者有着体力上的要求,导致在受众人群方面有着限制要求。研究采用电力驱动代替传统的人力驱动,并辅以遥控调速,既能够节省体力,也能让受众人群扩大,使其成为一种便携式的交通工具,也能够形成一种新的休闲运动方式。在分析智能滑板的运行原理和功能需求的基础上,设计了以Arduino Pro Mini为主控芯片,将无线蓝牙通信技术与电机调速驱动进行结合,实现智能数字化的控制。针对智能滑板控制系统的要求,采用PWM直流斩波调压方式实现智能滑板的自动巡航、加速、减速、刹车。本系统所用核心芯片为Arduino Pro Mini,以及HC05蓝牙模块、蜂鸣器模块、电调、电机等许多器件。该滑板具有智能自动化程度高、成本低、重量小、可靠性强等优点。
关键词:智能滑板;蓝牙无线控制;Android;无刷电机;
中图分类号:TN2
文献标识码:A
Arduino的出现,使硬件开发更为便捷简单,为物联网打下基础,极大的推动了物联网的发展,也使市面上出现了更多的智能硬件产品,人们对智能生活的体验也得到了极大的提升。
科技的进步使人们的生活发生了巨大变化,高速发展的科技使得人类生活愈加便捷。在交通工具发达的今天,汽车、地铁、高铁是大多数人们出行所选择的交通工具。而对于短途交通,则存在在公交车绕路远,出租车价格高昂,共享单车投放不足等问题,这便是“最后三公里”的问题。基于以上问题,便携式电动交通工具作用便日益凸显。研究是否能用智能滑板进行代步,用来改善传统的代步工具所存在的滑行费体力、不易操作上手、不易携带重物等问题。
智能滑板可以提高交通出行效率,节约了出行时间。智能滑板在基于Android操作系统的简易可操作性和开源性基础上,利用蓝牙无线技术控制滑板的运动状态。蓝牙作为一种抗干扰能力强、功耗低的无线通信技术,相较于其他无线控制技术,如红外、射频等应用范围更广,在中短距离范围控制中具有较大的优势。在市面上有很多智能硬件产品是使用WiFi进行连接的,而WiFi存在着信道干扰的问题,如果进入一个WiFi信号密集的区域,易出现对智能滑板失控现象,在物理层,蓝牙与WiFi使用的协议有差别,蓝牙使用跳频(FHSS),WIFI使用直列展频技术(DSSS)。使用跳频技术能够更好抗干扰。相比WiFi模块而言蓝牙价格更加低廉,可以做到控制设计成本,使整体造价下降一个档次。因此在探索智能化、低成本的智能滑板的可行性方案上开发出基于Ardunio,利用传感器技术开发出使用蓝牙无线通讯,使用APP进行控制的智能滑板。
1 主控芯片
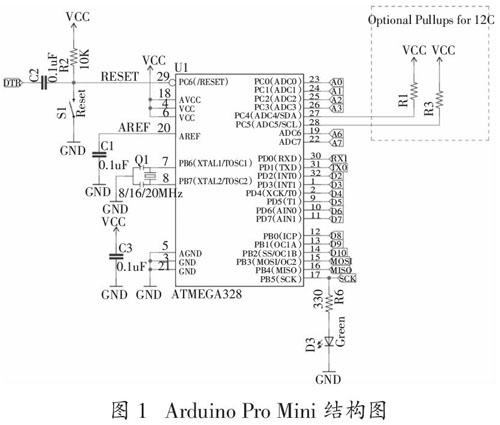
Arduino Pro Mini芯片的引脚如图1所示,Ar-duino Pro Mini具有微小,简洁和强抗能力的特點。芯片内部集成针对电机控制和电子调速器的PWM,有6路模拟输入,转换速度响应快速。Ar-duino Pro mini还拥有以下特点:
(l)Arduino Pro Mini为Arduino Mini的半定制版本,与Mini版本的管脚完美兼容。
(2)共有14路数字输入/输出口,6路为PWM输出,6路为模拟输出,还有着晶体谐振和复位按钮。
(3)为了缩小体积故不提供USB接口,需要使用ATmega8U2 USB转串口模块与开发端进行连接。
(4)处理器核心为ATmega168,是一款高性能低功耗的8位AVR微处理器。
2 HC-05模块
HC05蓝牙模块为连接智能滑板与Android手机之间的重要数据传输通道。当HC05蓝牙模块接收来自Android手机的控制信号之后,通过串口通信将数据传输到Arduino Pro Mini单片机上,单片机通过解析控制命令后,调用相应的驱动程序。所用的蓝牙协议为2.O+EDR,图2为蓝牙软件协议栈堆的数据传输过程,其中主机1为Android手机上的蓝牙模块,主机2为在单片机上的HC05蓝牙模块。通过这个流程图,可以更好地理解蓝牙的数据传输过程。
使用的HC-05蓝牙模块可以与单片机进行全双工通信。这样便可以实现Android手机与Ar-duino Pro Mini单片机之间的相互联系,数据流可以相互反馈,在手机端可以观察单片机上的实时状态,如电压、电量以及速度等数据。
蓝牙传输数据流程如图3所示。
在进行首次配对的过程中,将单片机与蓝牙模块通过引脚连接起来,TXD接RXD,RXD接TXD,pin_2接STATE。使用Usb_ttl模块进行连接(将EN引脚接至Usb_ttl模块的VCC引脚上)进入AT模式,之后使用sscom2串口调试助手进行设置配对即可。图4为HC05蓝牙模块原理图。
3 电子调速器
电子调速器,简称电调,是控制电机转速的控制装置。通过利用无刷电机内置振荡器产生的震荡信号与电调构成脉宽调制比较器,产生PWM脉宽信号加载在开关上,调节输出电压。
对于控制PWM输出,PWM频率在15 kHz左右,对于Arduino Pro Mini单片机的时钟频率,属于可掌控范围,占空比在于3%到100%之间,调速电压跟占空比的对应关系如表1。
定义启动调速电压为:2.6-4.5 V,加速时间为T1=3 s,减速时间为T2= 0.5 s。启动加速时间设定为3s,可以避免启动时带动人体前倾的危险情况发生。
调速电压<2.5 V定义为刹车,锁停PWM的输出,使PWM=I。延时0.1 ms之后,解开PWM的输出,使PWM=O,再次延时0.1 ms之后,锁停PWM输出,如此反复,直至刹车信号消失(点刹法)。图5为电机驱动控制模块原理图。
当调速电压稳定为一个峰值的时候(该峰值区间在2.6-4.5 V之间),智能滑板进行匀速巡航。滑板将以一个稳定的速度进行滑行。
当总电压低于26 V时,开始预警,触发蜂鸣器并使LED进入闪烁状态,当总电压低于23.6 V时,蜂鸣器急促报警,LED进入常亮状态,延时10 s后封锁PWM输出。当总电压回升至26 V以上时,解开PWM封锁。
4 电源设计
电源作为系统的供能部分,是驱动的核心动力源,也是整个系统设计的基础部分,故此电源电路的设计在文中占据着较高的地位,值得单独作为一个小节。本项目中主要的模块有Arduino Pro Mini单片机、HC05蓝牙模块、蜂鸣器模块、Nokia5110液晶屏、Sllion 2-6 s电子调速器、N5065有感无刷电机。Sllion 2-6 s电子调速器、N5065有感无刷电机所需电压较大,故使用外部独立电源,使用2-6S锂电池,该电池满载电压为27.2 V,工作电压为23.6 V。蜂鸣器模块工作电压在3~12 V之间,Nokia5110液晶屏与HC05蓝牙模块工作电压为3.3 V电压,单片机的工作电压设计为SV,此核心设计为单片机之间的电路。如图6所示是单片机的供电部分的电路设计,稳定电压电路由两部分组成:右侧电路输出为3.3 V,供电给液晶屏与蓝牙模块,左侧输出电路为SV,供电单片机与蜂鸣器。
5 系统测试
5.1 电路测试
在装置启动之前需要对电路进行测试,测试部分分为两块,晶振频率测试与电压测试。晶振的异常会引起电路出现异常。关于晶振频率的测试可以通过示波器进行测试,将示波器探头连接在时钟振荡电路的两极,调节示波器显示波形。测试结果如图7所示为正弦波波形,为晶振的正常波形。
通过万用表对电路中各节点的电流电压的测试,计算上实际损耗,系统电路测试正常,各部分模块电压没有异常状况。单片机电压的检测如图8所示:
5.2 蓝牙测试
蓝牙作为一种抗干扰能力强、功耗低的无线技术,也有着它的局限性。低功率和高频率限制了其应用范围,故对本文的通信质量进行测试。
无线蓝牙能在约9m的范围(无障碍物)内实现有效控制,连接通信方面良好,不会突然断开造成操作者对滑板失去控制。但是在有障碍物存在的环境下,如0.5 m厚水泥墙阻隔,控制信号出现断断续续的状况。
在抗干扰性的测试方面,我们在智能滑板周围部署了10个无线WIFI的AP连接点,5个蓝牙配对部件(与系统设计使用同一频段),占用了部分信道。对于WiFi的干扰来说,Android手机对于智能滑板的遥控范围缩短至7m左右,对于同频段的蓝牙信号干扰,Android手机对智能滑板的控制范围缩短至6.5 m,当15个干扰源一起部署的时候,控制范围缩短到Sm,且控制力度有跳频现象,每隔20 s会出现丢失1 ms的控制时间(这是在4m的控制范围内)。在2m范围内进行控制没有出现这种现象。
对于本文而言,控制设备与滑板距离在1.5 m以内,有效保障控制范围与连接的稳定性。
5.3 软件测试
在系统的运行中,假如程序有着BUG发出错误的指令,会让整个系统陷入错乱的状态,所以在烧录程序之前要对程序进行BUG测试。项目所使用的Arduino IDE是程序测试的主要角色,对于BUG与语法错误都会有标注,如果有錯误则无法编译通过。在调试成功后才可将程序烧录进单片机中。图9为Arduino IDE的程序测试图。
5.4 滑板测试
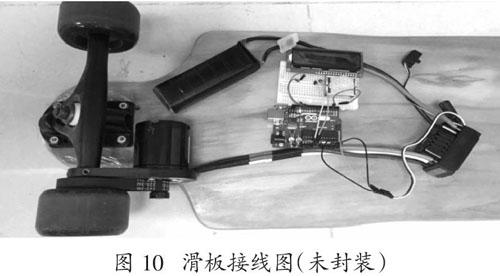
对于智能滑板的承重量与最大行驶速度需要进行实际测试。如图10为滑板接线图,还未进行封装。
N5065有感无刷电机的KV值为400,2-6S锂电池平时工作电压为23.6 V,满电电压为27.2 V)。
则滑板的电机转速计算公式为(1):
N= KV×U
(1)
故此N5065有感无刷电机的理论转速在于9440 rpm~10880 rpm之间。但是常态转速应为9440 rpm。
同步传送带的皮带轮与电机齿轮之间的比例约为3:1.电机负载为80%。故此理论最大时速为:
9440rpm*80%*1/3*15cm*60min/lOOOm=22.656km/h
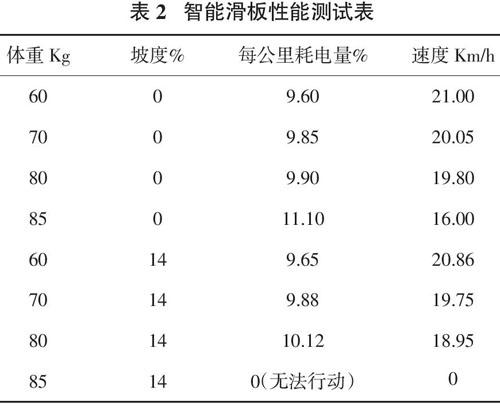
经过实际测试,载重为60 kg的成年人,滑板的实际运行速度为21 km/h。当实际载重达到85 kg时,电机负载过大,行动缓慢。因此极限载重应为85 kg,超出这个范围应该更换电池型号加大电压。爬坡的最大坡度为14%,续航达到10 km,所需充电时长为40 min,具体如表2。
7 结语
最后三公里的交通问题,是当前公共交通的短板,由于此智能滑板的便携性,可以弥补此最后三公里交通的短板,如果能够批量规范生产,保证智能滑板的安全性与质量,加上互联网思维的影响,智能滑板可以成为这个时代的主流交通工具。
参考文献
[1]曹静.城市快速路交通拥堵特征与实时排队长度确定方法研究[D].西安:长安大学,2016.
[2] 曾颖,基于WiFi的PROFINET网络接入安全技术研究与实现[D].长春:吉林大学,2017.
[3]马沙沙.基于Arduino&Android的烟雾报警系统[D].西安:长安大学,2017.
[4]崔晓梦,基于Arduino的物联网接入器的研究与实现[D].北京工业大学,2015.
[5]马晓爽,石征锦.基于Simulink的无刷直流电机双闭环调速系统仿真研究[J].制造业自动化,2016,(07):82-88.
[6]孟访,基于PIC单片机的无刷直流电机控制系统研究[D]滩南:安徽理工大学,2017.
[7]胡致强,基于PWM加移相控制的双Boost双向DC-DC变换器研究[D]武汉:华中科技大学,2016.
[8]赵方亮,智能家居中的嵌入式Linux移植与驱动程序设计[D].燕山大学,2016.
[9]朱天顺.基于FPCA的无刷直流电机调速系统设计[D].南宁:广西师范大学,2017.
[10]张静.基于安卓蓝牙的远距离通信系统设计与实现[D].大连:大连海事大学,2017.
[11] SU Z K,WANC H L NA L.Anti-disturbance rapid vibrationsuppression of the flexible aerial refueling hose[J]. MechanicalSystems and Signal Processing, 2018, 104: 87-105.
