变延迟的活塞发动机控制系统设计与试验
2019-09-10杨静宇李小光
杨静宇 李小光




摘要:针对应用于无人机的活塞发动机,通过对其工作状态的分解和工作状态分析。根据不同的工作状态设计了不同的控制律,并针对活塞发动机的延迟问题,设计了变延迟的控制系统。应用该系统可以有效地解决活塞发动机的定转速控制问题,也可以解决多发动机的转速一致控制。通过试验结果表明本文中设计的控制策略可以有效地实现发动机的状态切换和平稳控制,可以广泛应用于无人机活塞发动机的转速控制。
关键词:活塞发动机;转速控制;变延迟;状态切换;无人机
中图分类号:V234+.1 文献标识码:A
随着无人机行业的发展,无人机在各个行业的应用越来越广泛。而行业对无人机需求已经从原先的侦测、观察的轻小型无人机,拓展为大载荷、长航时、专业化的工业无人机。
目前,掣肘于电池储能密度,工业级无人机在执行长航时、大载荷的工作任务时仍然无法承担以电池为能源所带来的重量(质量)。因此市场上出现了越来越多的以燃油为动力的工业级无人机。活塞发动机因其结构简单、起飞重量小以及低廉的价格,成为大多数无人机的选择[1~3]。
发动机作为无人机的动力系统,无人机的旋翼转速和输出功率取决于发动机的转速。对于多动力系统的无人机,如双发四旋翼无人机,在无人机的姿态控制中需要两个发动机同步输出一致的转速,这同样需要对多台发动机采用一致的转速控制。对于无人机活塞发动机的控制有安全起动、转速变化平稳、定转速状态下误差小的要求[6]。发动机的定转速控制的优劣决定了无人机飞行性能[4,5]。
目前,无人机活塞发动机控制的研究主要集中在针对负载前馈的控制[7]、发动机模糊控制[8]两个方面,对于活塞发动机控制中的延迟问题却少有涉及。本文通过对发动机工作状态分解,对延迟产生原因进行分析,给出针对活塞发动机延迟问题的控制策略,并通过试验加以验证。
1 发动机工作状态分解和控制策略
1.1 发动机工作状态
活塞发动机在无人机使用中,在无人机的起飞、工作和降落中,经历了起动、暖车、额定、暖车、停车的过程[9]。其中分为起动和暖车的两个非正常工作状态以及额定工作状态。在起动工作状态下,发动机的工作状态不稳定,转速变化幅度较大,且可能存在点火失败、起动后短时间内熄火、单缸运作等不正常的情况。另外有部分发动机,如ROTAX 912 ULS发动机在起动时需要将加浓阀打开,此时的发动机工作状态和额定状态有很大的不同,相同的控制策略无法适应两种状态的切换。对于以多台活塞发动机为动力来源的无人机,受到起动电池电压不够等因素影响,可能会出现单台发动机点火成功的情况,需要进行熄火检查或者单发运转的情况下起动另一台发动机。为了方便与安全起见,起动阶段的发动机控制策略一般不选择额外添加控制器。
1.2 暖车工作状态特性和控制策略
暖车工作状态时间一般处于活塞发动机起动后到额定工作状态之前以及停车之前。起动后的暖车工作状态用于提高发动机缸内温度、润滑油温度,同时对发动机的工作状态进行监测,确定发动机是否处于正常工作状态。停车前的暖车工作状态主要用于将发动机的缸内温度和滑油温度冷却。这段时间内外部的升力或推力系统的变化几乎可以忽略不计。此时的发动机因不在工作状态对转速控制精度的敏感度比较低,发动机的控制策略可以采用单PID控制器,为了简化系统也可以采用单比例增益的控制器。对于发动机暖车工作状态有规定转速的发动机,也可以采用以规定暖车转速为当前期望转速的方式来控制。控制律结构如图1所示。
图1中n为发动机当前期望转速,n为发动机实际转速,W为发动机风门开度控制量,Δn为发动机实际转速与目标转速差,K为比例增益。
1.3 额定工作状态特性和控制策略
发动机的额定工作状态是无人机正常飞行工作时所需要的状态,其对发动机的转速控制精度和适应负载的变化能力的要求较高。额定工作状态下,发动机的转速相对于期望转速的误差不超过2%。在额定工作状态下,存在旋翼迎角的变化,发动机的负载会产生变化,负载的变化会引起发动机转速的瞬时改变,此时需要引入一个前馈来配平瞬时转速改变。
活塞发动机与电机最大的不同在于活塞发动机的控制具有一定的延迟。当控制器给出指令后,作动器响应后产生发动机风门开度变化,燃烧室内气体推动活塞速度產生变化,从而实现了发动机转速的改变。在此过程中产生的延迟主要包括了活塞做功的延迟、作动器响应延迟和系统固有延迟。如果忽略这些延迟,在控制器给出指令时发动机的响应会产生滞后,在下一条指令给出时,发动机的工作状态仍然未能达到上条指令期望。这时控制器下一条的指令就会继续加大给出的控制量,产生了过量的调节,最终会导致发动机的响应速度降低和稳定状态下的误差增大。活塞做功延迟通常可以视为当前转速下的转速周期,作动器响应延迟由控制量决定。时间延迟公式如下:
τ=τ+τ+τ(1)式中:τ为时间延迟,τ为活塞做功延迟,τ为作动器响应延迟,τ为发动机固有延迟。
针对额定状态的发动机工作特点,本文采用了负载前馈与反馈PID控制相结合的复合型控制策略,用来满足发动机转速控制精度要求高、变化快速和抗负载变化能力强的要求。通过增加发动机响应的延迟环节,避免了因延迟产生的过量的调节。其控制结构框图如图2所示。
图2中n为发动机当前期望转速,n为发动机实际转速,w为发动机风门开度控制量,Δn为发动机实际转速与目标转速差,k为比例增益,k为积分增益,k为微分增益,e-τS为时间延迟环节。
2 发动机控制试验
2.1 试验设计
发动机控制系统分为硬件部分和控制器部分。硬件部分由活塞发动机、作动器和发动机输出转速采集器组成。控制器则选用Arduino控制器。Arduino是Atmel公司开发的以AVRmegal核心的开源接口板,具有运算性能高、成本了因兼、界面简洁、可操作性强的优点,被广泛运用于科研学习与生活中。
硬件选用二冲程三叶S40A活塞发动机,额定工作转速为7000r/min。作动器采用Hitec 85MG舵机来控制发动机风门开度,通过测量得到舵机作动速度为0.16s/60°,换算为输出量改变1PWM值,需要作动时间为0.267ms。输出转速传感器采用3144霍尔传感器将采集到的正弦信号转化为方波型号后接入Arduino控制器中得到发动机的实时输出转速[10,11]。
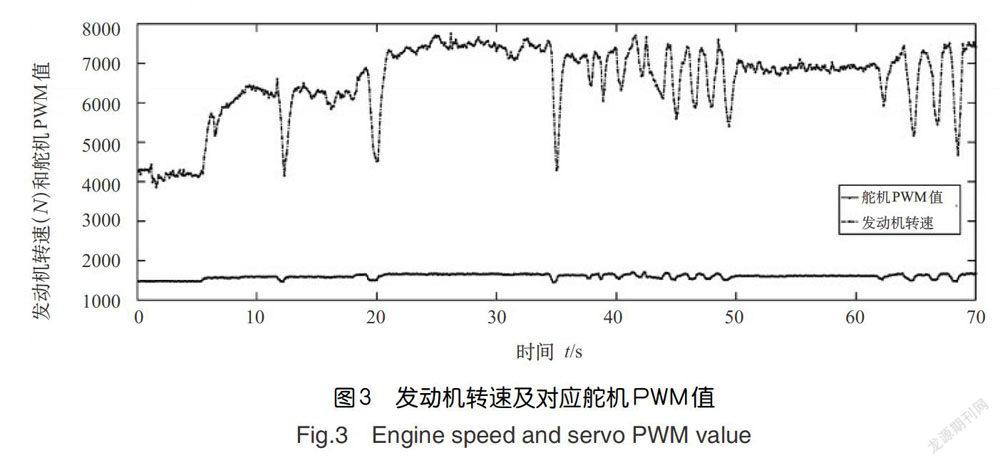
2.2 发动机转速随风门开度变化曲线
在不外加控制器的情况下,通过改变作动器的PWM值的大小,进而改变发动机的输出转速。从此得到的发动机转速和舵机的PWM值变化曲线如图3所示。可以看出发动机随着作动器的响应存在一定的滞后,发动机的延迟时间在0.1~0.12s之间。并且通过拟合曲线公式得到发动机转速在5500~7500r/min时,近似得到转速变化每100r/min对应的舵机PWM值变化15,该值可以用于下文中的PID整定。并且可以由图中看出5500r/min以下的转速随舵机PWM值的变化幅度过于剧烈,且在3500r/min以下时发动机有随时熄火的可能,故将发动机暖车工作状态的自标转速定为6000r/min[12]。
2.3 发动机PID控制下的转速变化曲线
首先根据上述得到的发动机转速和对应PWM值的关系图,对发动机进行PID整定,通过重复的试验和修改参数后取比例增益K=0.02,积分增益K=0.002,微分增益K=0。将整定好的PID参数写人控制器后进行发动机试验,并对发动机的转速和舵机的PWM值进行记录。在试验中,发动机起动运转后确认发动机工作状态安全后,将发动机控制转换为定转速的控制。目标转速随着下达给控制器的指令进行变化,在30s时将发动机由起动状态切换为目标转速恒定为6000r/min的暖车工作状态。等待转速稳定后在额定和暖车工作状态之间切换。对得到的转速等数据进行记录并处理后得到发动机转速和舵机PWM值曲线图如图4所示。
图4为对PID参数进行整定之后的发动机转速曲线。由图中可以看出,发动机转速由暖车工作状态到额定状态的调节时间在1.3~1.5s之间。在目标转速在6000~7000r/min时,发动机的转速误差在±200r/min和±190r/min以内,仅能满足暖车状态时的转速要求而达不到对于额定工作状态转速误差在2%以内的要求。
2.4 发动机PID控制下的转速变化曲线
在PID参数不变的情况下,增加延迟环节。延迟时间如下:
τ=τ+τ+τ(2)
τ=1/Nτ=0.267×sp(3)式中:N为当前发动机的实际转速,sp为当前循环的舵机PWM值的控制量,取20ms。
对控制程序进行更改后再次进行试验,得到发动机转速和舵机PWM值曲线如图5所示。
如图5所示,可以得到发动机在由6000r/min的暖车工作状态切换到7000r/min的额定工作状态时,调节时间为0.9~1.0s,由额定状态切换为暖车工作状态时的调节时间为0.5~0.6s。目标转速在6000r/min时,转速误差在±200r/min以内,满足预定暖车工作状态下5%的转速误差的要求。目标转速在7000r/min时,转速误差在±130r/min以内。满足预定的额定状态2%的转速误差的要求。对比变延迟控制下和传统的PID控制可以发现,变延迟环节的加人可以提高系统的响应速度,使得发动机在不同的状态转换时的过渡更加快速平滑。并且可以减小发动机在平稳状态的转速误差,提高了发动机转速的控制精度,从而全面地提高了发动机的控制性能。
3 结束语
发动机转速控制试验说明,本文提出的活塞发动机变延迟的控制系统可以有效解决活塞发动机延迟大和转速变化引起的系统响应时间差异,满足发动机工作状态变化时的控制要求,且额定状态的转速误差在允许范围内。通过对两台及以上发动机同时接入此系统,给予相同的期望转速,在各自整定PID参数和延迟参数的情况下,也可以实现对多动力系统的无人机的转速同步控制。
参考文献
[1]李阳,娄建安,李川涛,等.直流无刷电机容错控制系统设计与实现[J].计算机测量与控制,2013,21(12):3253-3255.
[2]曾國梗,廖智麟,阚兆成.某型无人直升机活塞式电喷发动机转速控制设计及试验[J].航空动力学报,2011,26(6):1384-1388.
[3]刘艳华,孙颖,孙智孝.活塞发动机与无人机性能匹配分析[J].飞机设计,2007,27(4):10-12.
[4]杨振祥,阮红霞.小型无人直升机动力装置活塞发动机的动态效应[J].直升机技术,2006(2):32-35.
[5]王小青,黄一敏,杨一栋.小型无人直升机活塞式电喷发动机冲速段的控制策略[J].航空动力学报,2007,22(6):928-932.
[6]徐志鑫,祖家奎.小型无人直升机活塞式发动机转速控制[J].智能机器人,2012(3):45-48.
[7]雷勇,李辉,石小江.航空发动机空气起动系统的前馈一反馈复合控制[J].机电工程,2011,28(5):586-589.
[8]毛建国,马粮,陈明浩.小型航空活塞发动机混合动力系统仿真与控制策略研究[J].重庆理工大学学报:自然科学,2018.32(3):68-78.
[9]周黎明.汽油发动机转速控制系统的设计与研究[D].长沙:长沙理工大学,2011.
[10]余永辉,彭宇兴,潘凯.基于单片机的发动机转速测量系统的分析研究[J].仪器仪表用户,2005,12(5):11-13.
[11]魏沣亭,祝雪平,张海荣.基于8031单片机的发动机转速测量[J].航空计算技术,2003,33(2):120-121.
[12]徐志鑫.无人直升机活塞式发动机控制技术研究[D].南京:南京航空航天大学,2012.
