机载激光测速技术在大气数据校准领域的应用研究
2019-09-10秋路屈飞舟惠辉辉
秋路 屈飞舟 惠辉辉





摘要:在分析准确大气数据重要性及传统校准方法局限性的基础上,本文研究建立了基于机载激光测速的大气数据校准方法,涵盖了静压、空速、马赫数、温度、迎角和侧滑角等参数,总结了国外相关研究项目与验证成果;研究了国内试验条件建设需求,展望了机载激光测速技术未来在飞行试验及航线运营等领域的应用及发展。本文对后续开展相关研究具有一定的参考价值。
关键词:机载激光;激光测速;大气数据校准;多普勒效应
中图分类号:V217+.2 文献标识符:A
准确的大气数据对飞机各系统正常工作及飞行安全至关重要,因此新机试飞时空速校准必不可少。通常需校准的大气数据包含静压、空速、马赫数、温度、迎角和侧滑角等参数。在各型飞机飞行试验中,大气数据校准方法多种多样,但部分传统校准方法存在一定的局限性,如成本高、试飞周期长等。近年来,基于机载激光测速的大气数据测量技术得到了广泛的研究,令人满意的测量精度、远距测量等特点决定了该项技术用于大气数据校准时具有一定的优势[1],本文将展开研究。
1 传统校准方法
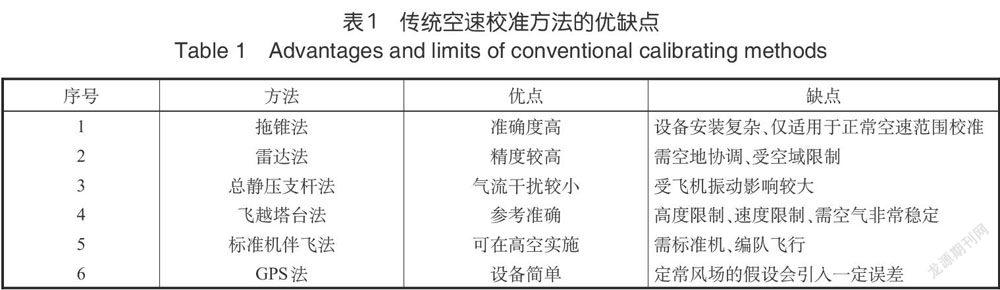
实现静压、动压、马赫数及空速校准的方法有拖锥静压法、雷达法、总静压支杆法、飞越塔台法、标准机伴飞法,以及GPS方法等[2],优缺点分析详见表1。
迎角、侧滑角校准有静态法、动态法。前者通过稳定直线平飞、定常侧滑实现,校准范围有限;后者通过机动飞行与事后辨识的方法实现[3],数据处理复杂。
温度校准有直接法、间接法。直接法是在飞行试验开始前利用探空气球获取试验区的大气温度,然后与试验过程中机载传感器获取的静温值进行对比,该方法实时性较差。间接法基于静温与总温的关系,在空速校准的迭代计算中得到真实的静温值。
上述方法除不同程度地存在试验周期长、架次多、成本高等问题外,从大气数据校准的角度分析,其综合效率较低。本文研究的基于机载激光测速的大气数据校准方法不仅精度高、且能同时校准所有参数,有效解决了上述问题。
2 基于机载激光测速的大气数据校准方法
机载激光测速技术的基本原理是多普勒效应。多普勒效应是19世纪奥地利物理学家多普勒.克里斯琴。约翰(Doppler,Christian Johann)发现的声学效应。在声源和接收器之间发生相对运动时,接收器收到的声音频率与声源发出的原频率之间存在频率差,称为多普勒频差或频移。光信号经大气中的气溶胶粒子散射后会产生多普勒频移[4],表达式如下:
Δf=2vcosθ/λ(1)式中:Δf为多普勒频移,v为发射光源与散射粒子的相对运动速度,θ为激光与相对运动速度方向的夹角,λ为激光波长[5]。
根据上述原理,机载激光设备可根据飞机远前方粒子的散射效应测量飞机相对于大气的速度,即真空速(TAS)。激光测速的远距性、非接触性、埋人式传感器决定了其用于大气数据测量及校准的优势。
2.1 基本原理
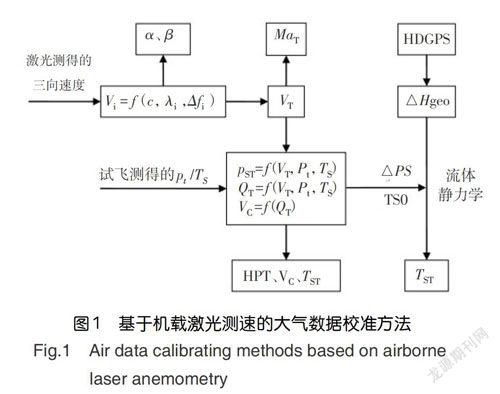
基于机载激光测速的大气数据校准本质是通过多向(至少三向)测速获取飞机的真空速矢量,根据其大小开展空速、静压、马赫数等参数校准,根据其方向开展迎角及侧滑角校准。校准方法总结如图1所示。
以欧洲AIM2项目中的坐标系定義为例,如图2所示,校准方法详述如下。
(1)真空速
采用机载激光测速设备获得4个方向的速度后,进行坐标转换,即可得到飞机体轴系的三个速度分量,合成即可得到真空速:
[VVV]=T[VVVV](2)式中:T为转换矩阵。
真空速的计算公式为:
(2)气流角
由真空速、体轴系速度分量即可得到真实迎角(AOA)、侧滑角(AOS),计算公式如下:
AOA=cot(V/V)
(3)空速校准
通过以下公式进行空速校准迭代计算即可得到静压、动压、指示空速及马赫数的真实值。
(4)温度校准
由式(3)空速校准中的迭代计算即可获取真实的静温值。通过上述方法得到的静温值,可结合GPS测量的高度数据、采用流体静力学公式进行验证,验证方法详见参考文献[1]。
2.2 误差分析
机载激光测速的主要误差可分为安装误差和测量误差。
(1)安装误差
设备安装时,激光探头中心轴的方位决定了激光测量坐标系与机体坐标系的相对位置,存在安装角误差。
(2)测量误差
测量误差的来源有大气中气溶胶粒子的浓度与大小[6]、基本原理计算公式近似、激光光束的线宽、探测器孔径的尺寸、探测粒子的有限过渡时间、速度梯度、信号处理算法、角度测量误差和系统振动等[7]。
3 国外研究进展与验证成果
基于机载激光测速开展大气数据校准,其本质是利用光学技术获取准确的大气数据,国外从19世纪70年代便开始了相关研究与验证。
3.1 法国Crouzet项目
1979年,法国国防机构(DRTE and STTE)开始资助高诺斯(Crouzet)公司的激光测速研究。项目开展中,在法国试飞中心开展了激光测速设备的试飞验证,主要成果如下:
(1)“美洲豹”(Puma)直升机搭载第一代设备,验证机载激光测速的准确性。
(2)“小帆船”(Caravelle)运输机搭载经光学改进的第一代设备,探索激光测速适用的高度、速度范围。
(3)“幻影”(Mirage)IIIR战斗机搭载的第二代设备是按照军标要求改进的产品,是单轴激光测速仪ALEV-1的原型,在1987年进行了20架次试飞验证,表明了激光测速设备可用于超声速战斗机,且适应性良好,满足跨声速区的使用要求。
(4)ALEV-1升级至ALEV-3,具备三轴测速能力,可同时获取真空速、迎角和侧滑角。
3.2 欧洲FP7项目
欧洲FP7项目对三轴激光测速设备进行了全面验证。法国泰雷兹集团(Thales Group)负责采集机载激光测速设备使用过程中的原始信号并建立信号处理架构。该项研究是机载激光测速技术从验证向应用的转折点,且相关验证亦为该产品的取证奠定了基础[1]。具体研究有:
(1)NESLIE项目
研发了用于民航飞机的4轴激光(波长1.51m)测速仪[1],同时测量真空速、迎角及侧滑角,在荷兰航空航天中心(NLR)的赛斯纳“奖状”(Citation)Ⅱ试验机上进行了17架次的飞行验证,验证产品在不同大气状态、不同气象条件下的工作情况。
(2)DANIELA项目
在NESLIE的基础上进行了光学系统优化、信号处理系统升级等改进,总计29架次的试飞覆盖了从赤道到北极的16个国家,旨在一切使用条件下进行验证。
(3)DALHEC项目
研发了首次采用1.55μm波长的4轴激光测速仪,并在直升机上进行验证,该系统首次验证了激光测速设备在全飞行包线内的空速测量能力[1]。图3为DALHEC试验。
3.3 欧洲AIM2项目
欧洲AIM2项目旨在研究先进的机载测试技术以缩短试飞周期、降低试飞成本[4]。法国航空航天研究院(ONERA)成功研发了波长为1.5μm的激光测速传感器,用于测量真空速、迎角及侧滑角。该产品在Piaggio P180飞机上进行了验证,设计的试飞动作有稳定飞行、水平加速、拉升、水平转弯,用于表明真空速、迎角及侧滑角测量值的准确性与跟随性,试验结果证明了激光测速技术可以获取高质量的数据。
3.4 美国LAMS项目
该项目由国家大气研究中心(NCAR)完成,研发了激光大气数据传感器(LAMS),证明了激光技术可以降低测量参数的不确定度[8],并提出了完整的基于机载激光测速的空速、温度校准方法。相关验证在“湾流”(Gulfstream)GV、C-130试验机上进行。
3.5 美国OADS项目
GADS公司开发了光学大气数据系统,利用大气中气溶胶粒子的米散射和多普勒效应,采用对人眼安全的不可见激光测量真空速、迎角和侧滑角,采用紫外激光实现大气温度、密度的测量及大气压力的计算。
2014年12月,该系统在空客的“海豚”(Dauphin)6542直升机上完成了飞行试验验证。目前GADS与空中客车公司正共同为该系统的装机认证而努力[6]。各研究项目的主要技术指标详见表2。
4 国内试验条件建设需求
国内各型飞机在开展大气数据校准飞行试验时尚未采用机载激光测速法,针对该方法的应用尚处于研究阶段。为了满足基于该方法的试验需求,试验条件建设必须覆盖试飞技术、试验设备、软件开发等方面。
试飞技术包含试验设计规划、试飞动作及试验实施等。相比于传统方法,该方法几乎适用于飞机的整个高度一速度包线,合理规划试验内容显得尤为重要。
机载激光测速设备是该方法的核心,国外已有较成熟的设备,国内尚在研发验证阶段。试验设备包含激光发射器、光学玻璃、系统机箱及用于数据传输、连接电源的线缆。在设备安装时,还需根据其在试验机上的安装位置、安装空间等因素设计支架及连接件等。图4是GADS公司的产品示例。
在常规校准试飞数据分析软件的基础上,该方法的软件需求还包括对激光束、多普勒频移等信号的分析及处理。
5 结束语
大气数据校准的基础是相比机载动静压、气流角、温度传感器等更精准的大气数据测量技术。本文介绍的基于机载激光的大气数据测量及校准方法属于“先進大气数据系统”的研究范畴[9]。基于机载激光测速的光学大气数据系统将有效解决各型飞机在大气数据测量中遇到的问题,如战斗机跨声速区及直升机低速区测量误差大、在极端气象条件出现的传感器失效等。
本文介绍的激光测速方法、OARS系统均基于大气中气溶胶粒子的米散射效应,受气溶胶粒子数量限制,该方法在纯净大气中无法实现真空速测量。近年来,Ophlr等公司致力于研究分子光学大气数据系统(MOADS)[10],它能同时利用大气分子的瑞利散射与气溶胶粒子的米散射,不仅能有效解决上述问题,且能同时测量大气密度、大气温度等参数。
在未来发展中,OADS、MOADS将不再局限于研发验证或飞行试验设备,可作为高性能大气数据系统在各种气象条件下为飞机提供精确数据。
参考文献
[1]Alain V.Laser Anemometry[Z].ENC,2015.
[2]Edward A H.Airdata measurement and calibration[R].National Aeronautics and Space Administration,1995.
[3]Jacques M.A laser anemometer reference for air datacalibration[C]//Aerospace and Electronics Conference,Proceedings of the IEEE,1988.
[4]Augere B,Besson B,Fleury D,et al.1.5wrn lidar anemometerfor true air speed,angle of sideslip and angle of attackmeasurements onboard piaggio P180 aircraft[Z].2015.
[5]梁应剑,梅运桥,程丽媛,等.基于米散射的光学大气数据系统研究[J].测控技术,2015,34(1):32-34.
[6]Zhang Zhengji.Lda application methods:Laser doppleranemometry for fluid dynamics[M].Springer,2010.
[7]周健,冯庆奇,马曙光,等.参考光束型激光多普勒测速仪的误差分析[J].强激光与粒子束,2010,22(11):2581-2587.
[8]Cooper W A,Spuler S M,Spowart D H,et al.Calibratingairborne measurements of airspeed,pressure and temperatureusing a Doppler laser air-motion sensor[J],AtmosphericMeasurement Techniqoes,2014(7):3215-3231.
[9]孙友师.光学大气数据测量系统的发展研究[J].测控技术,2010(9):6-9.
[10]马航帅,雷廷万,李荣冰,等.高性能飞行器大气数据传感技术研究进展[J].航空计算技术,2011,41(5):118-123.
