基于电阻屏的板球控制系统
2019-09-09王宪菊黄修道胡锦静
王宪菊,陈 韬,黄修道,胡锦静
(阜阳师范大学物理与电子工程学院,安徽阜阳236037)
板球系统是一个非线性、多变量、复杂的控制系统[1-9]。简单定义即通过不断调整平板的角度来达到控制小球在平板上的位置和轨迹跟踪目的的机械系统[2,4-5]。板球系统作为控制理论实验平台,主要用于验证各种控制算法的优劣[6-10],本文也是基于此首先完成板球控制系统的机械结构和控制电路设计,然后通过理论分析和数学建模得到系统的状态方程,进而对状态方程进行计算和处理得到系统的传递函数。根据分析结论可知,X轴和Y轴相互独立,因此,对X和Y轴分别设计了PID控制器。
1 板球系统的数学建模及定性分析
基于电阻屏的板球系统机械结构如图1所示,由电阻触摸屏、托盘、小球、舵机、支架、连杆和控制电路组成,控制器采用STM 32系列单片机。首先,在触摸屏上建立直角坐标系,通过采集电阻屏输出电压值计算小球的实际坐标位置;然后,把实际坐标数据与设定位置数据进行比较,运用PID算法得出控制舵机角度的PWM控制量;最后,控制器发送给舵机,舵机带动连杆转动,从而控制小球的位置和运动状态。
参照板球系统机械图,以触摸屏为二维平面,平面左下角设为坐标原点,建立x,y两个方向的直角坐标系;以电阻屏中心点(133,100)为支撑点,在电阻屏相邻的两个边下方安装舵机,实现平板x、y轴方向转动。板球系统的机械动力学模型如图2所示。
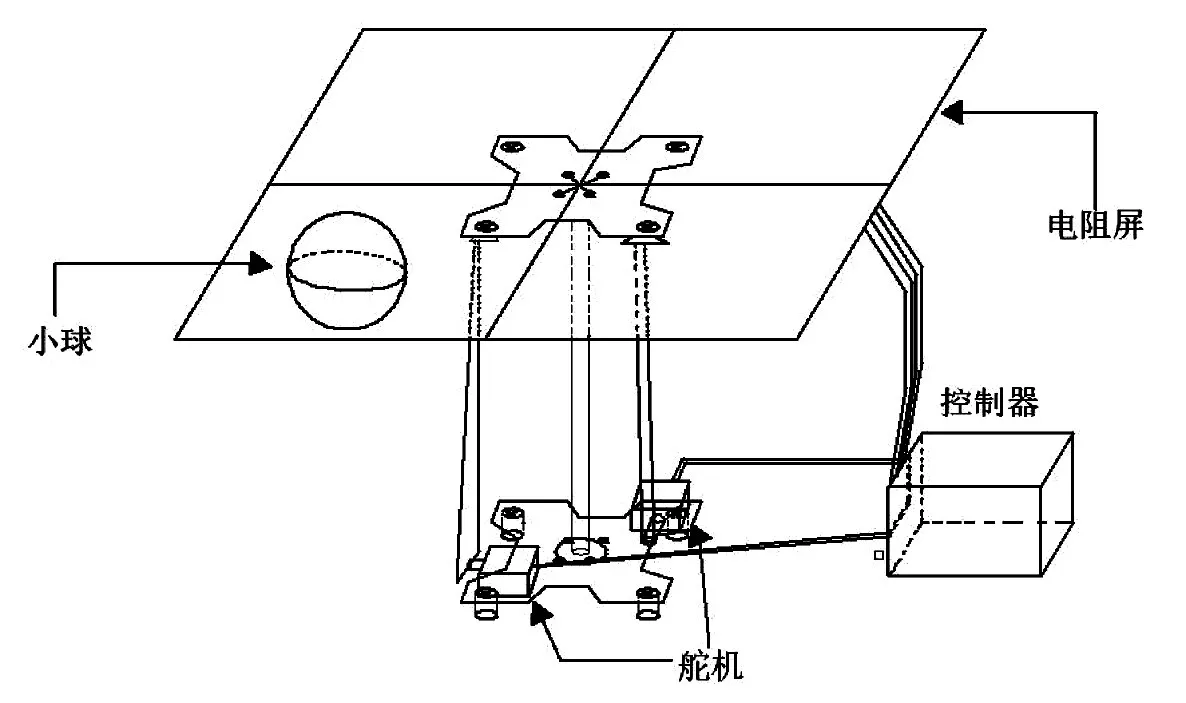
图1 基于电阻屏的板球控制系统机械结构图
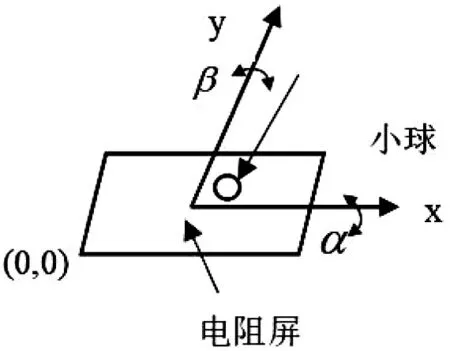
图2 板球系统机械动力学模型
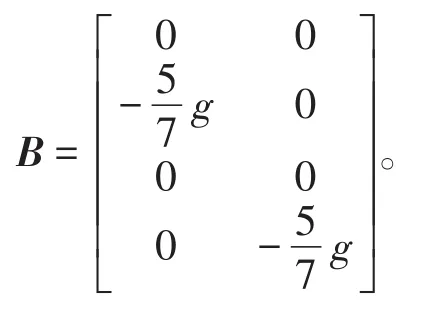
利用牛顿定律和拉格朗日方程,对以上模型进行动力学分析,计算得出以下状态方程:
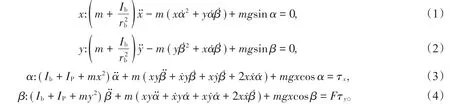
式中各物理参数如表1所示。若选取平板的倾角α、β为控制量,由于力矩不会影响舵机的位置,所以方程(3)、(4)可以忽略。在平衡状态下,平板处于水平位置,即α=0,β=0,因为平板的转动角度不大,大约在±0.1 rad范围之内,所以正弦函数可以用角度代替,即sinα≈α,sinβ≈β。
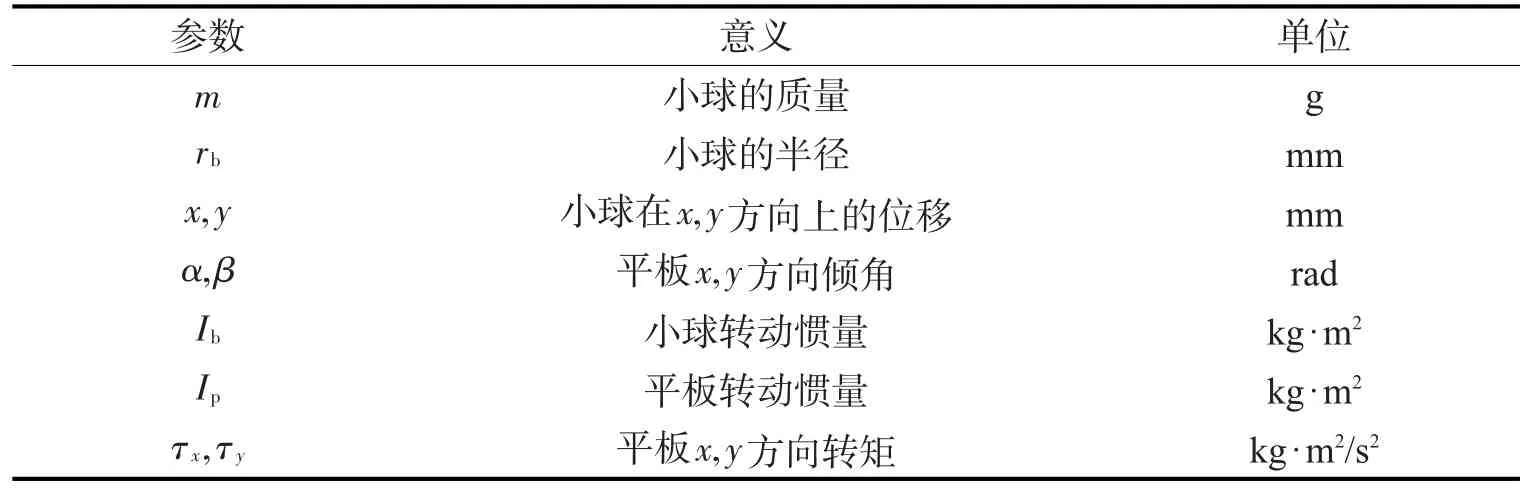
表1 板球系统物理参数

由此可知系统可控,且x轴和y轴的控制相互独立,可以针对x轴和y轴分别设计控制器,传递函数的表达式均为。
2 系统控制方案
由于板球系统是一个欠驱动系统[3],对实时性要求较高,而积分调节会降低系统稳定性,使动态响应变慢,因此本系统采用位置式PD算法控制舵机的角度和速度。控制方案如图3所示。
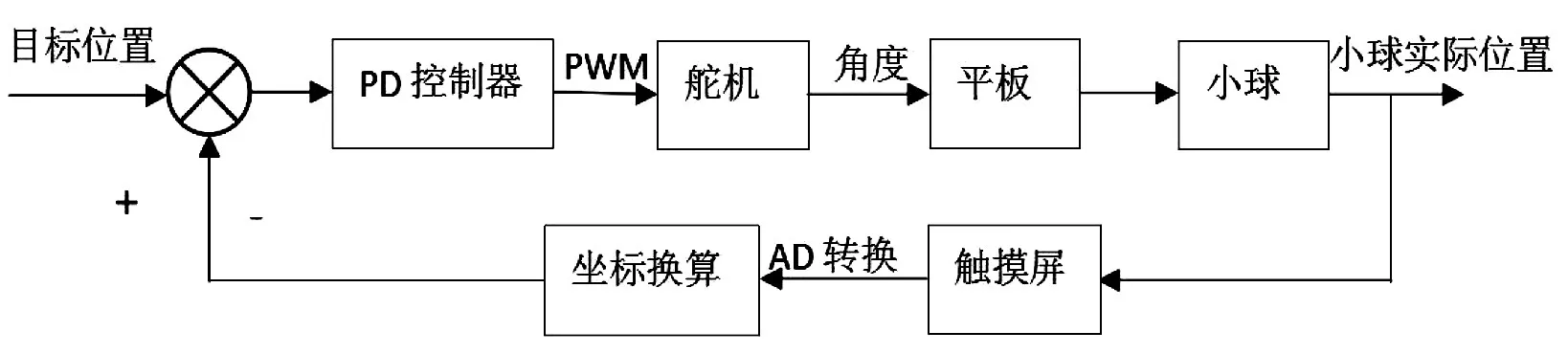
图3 系统控制方案
系统完成初始化后,电阻触摸屏定时采集小球的位置坐标(x,y),与目标坐标(xd,yd)进行比较,得差值由系统的状态方程(5)可知,x轴和y轴相互独立,可分别对其设计PD控制器。PD表达式为

其中,e(k)代表本次偏差;e(k-1)代表上一次的偏差;pwm(k)代表本次输出的舵机角度控制量;PD控制器输出控制量给舵机,舵机带动连杆转动,使平板发生相应角度的倾斜,控制小球动态的稳定在目标点或沿规划轨迹运动。
3 控制实验分析及参数整定
按照图3所示的控制方案设计板球系统的控制算法,设平板左下角为坐标原点,测得中心点(支撑点)的坐标值为(133,100),板球系统的物理参数:小球质量m=250 g,小球半径rb=20mm,平板长度L=266 mm,平板宽度d=200mm。
参照系统状态方程(5),由于A为已知,可选择控制u来消除系统非线性,然后根据线性控制原理来选择Kp和Kd,具体实现方法为使多项式s2+Kds+Kp所有根都落在复平面左上象限,即需要下面方程的根为负值

可设方程的两个根均为-λ,有(s+ λ)2=0,即s2+2λs+ λ2=0,则可设计Kd=2λ,Kp= λ2。改变λ值,通过实验,发现λ=8时中心点定位比较准确,如图4所示,x轴跟踪曲线稳定后的平均误差为0.5mm,y轴跟踪曲线稳定后的平均误差为1.5mm;λ=9时圆轨迹曲线较理想,如图5所示,平均偏离误差为1 mm。
4 结束语
本文针对小球定位及轨迹跟踪开展实验研究,采用电阻触摸屏实时反馈小球位置信息,利用PD算法实现小球定位及圆轨迹跟踪,以线性控制理论为依据,通过改变单一λ值完成对PD参数的整定,缩短了参数匹配的时间。实验结果表明,本系统控制精度较高,控制时间较短,达到了控制要求。证明本系统控制方法简单可行,切实有效。
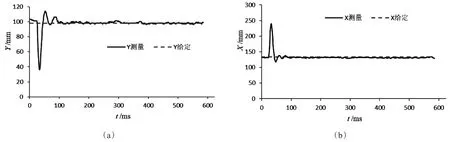
图4 中心点定位(λ=8)。(a)x轴跟踪曲线;(b)y轴跟踪曲线
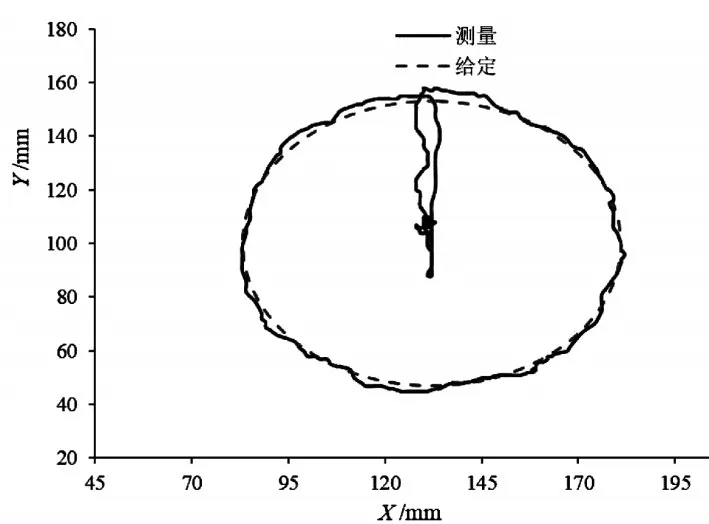
图5 圆形轨迹跟踪控制(λ=9)