工程摄影测量中数码相机检校方法研究
2019-09-09王乐魏斌王坤
王 乐 魏 斌 王 坤
吉林交通职业技术学院 吉林 长春 130021
1 引言
普通数码相机由于体积小、重量轻、便利数字图形采集和存储等优点而得到广泛应用。但也存在了一些缺点,在量测过程中无法提供内方位元素,由于存在着较大的镜头畸变差,导致像点、投影中心与对应的物点之间的共线关系被破坏。因此在使用数码相机获取测量数据前,需要对相机进行检校,为了保证摄影测量成果质量满足解算精度要求。
常用的数码相机检校方法有:空间后方交会、直接线性变换,光线束自检校以及多像灭点检校法等。其中空间后方交会又包括单片空间后方交会和多片空间后方交会。
2 工程摄影测量中数码相机检校内容
数码相机的检校内容是通过获取每个像束的正确位置,利用内方位元素恢复摄影中心与像片之间的相对几何关系。同时,必须掌握光学畸变系数才能恢复光束形状。一般检校内容包括:主点位置(X。,Y。)与主距(f)的确定;光学畸变系数的测定等。
3 工程摄影测量中数码相机检校方法
数码相机检校方法很多,本文主要以两种方法介绍数码相机检校。
3.1 多片空间后方交会检校
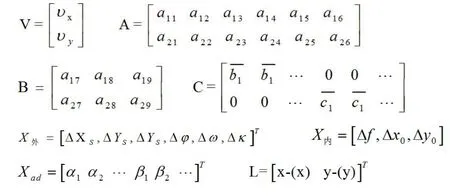
多片空间后方交会检校是一种基于共线条件方程的检校方法,它以像点坐标为观测值,主要目的是解决内方位元素()和一些附加参数()。但同时解决像片的外方位元素()。误差方程式表示如下:

式中符号用矩阵表示如下:
3.2 直接线性变换法(DLT)
DLT是一种在像点的“坐标仪坐标”和对应的物空间坐标之间建立直接线性关系的算法。该算法在进行非量测摄影测量过程中,不需要初始化的内、外方位元素。在共线方程的基础上,推导出来DLT方法。共线条件方程如下:
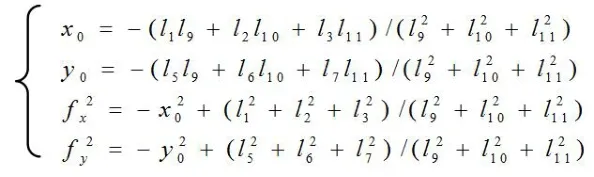
在此基础上,利用DLT变换系数和畸变系数之间关系,利用迭代法求解相机主点和主距。
4 实验场地
实验场地标定出已知空间坐标,根据DLT和多片空间后方交会法进行相机检校,如表所示:

表一:检校点中误差
5 结论
本文主要介绍了直接线性变换(DLT)和多片空间后方交会。通过研究对比发现,这两种方法都能达到高精度要求,而且可以通过冗余检查点检查结果的质量。
直接线性变换解法的优点是在进行非量测摄影测量处理时,不需要内、外方元素的初始近似值;缺点是需要高精度的已知结构信息,检校过程复杂。而多片空间后方交会是一种较为可靠且精度高的相机检校方法,它利用DLT方法获得摄像机内、外方位元素的初始值,然后进行计算。
