基于车辆行为的车载电池SOC的预测
2019-09-05许娟婷孟恒宇郭文超
许娟婷 孟恒宇 郭文超
(上海交通大学 1. 密西根学院; 2. 航空航天学院;3. 机械与动力工程学院, 上海 200240)
1 研究背景
近年来,为了解决传统内燃机汽车带来的能源与污染问题,同时伴随着智能交通和大数据技术的发展,汽车的智能化、电动化、网联化、共享化成为未来汽车发展的新趋势。然而电动汽车的普及程度却远远不够,其根本原因在于消费者对电动车续航里程的担忧和公共充电基础设施有待进一步完善。
车载动力电池的荷电状态(State of Charge,SOC)是车辆续航里程的重要指标,因而实现SOC的准确预测是保证电动汽车可靠运行的前提,也是电池组使用和维护的重要依据,更是为驾驶员的驾驶行为提供合理的参考建议。同时,以“上海市新能源汽车公共数据采集与检测平台”采集的大数据为基础,挖掘车辆行为特征(如车辆出行时间特征、能耗特征、充电特征[1-2]等),从而使车企更加懂得用户的出行需求和行为习惯,对于进一步促进汽车的共享化以及电动汽车的推广和发展具有至关重要的意义。
2 设计原理
2.1 设计思路
随着共享电动汽车分时租赁市场的发展及私人电动汽车的慢慢普及,积累了大量的用户行为数据。本文以纯电动汽车(BEV)为研究主体,以SOC为研究对象,首先筛选切割出所需的数据集,用数据驱动的方法分析车辆行为规律(包括车辆驾驶行为和充电行为),从而为厂商更好的服务于用户提供实质性建议。同时采用机器学习的方法结合驾驶行为估计车载电池SOC并预测出短期内SOC的变化规律,为下一步SOC的预测提供指导性建议。
本课题研究内容的系统框架如图1:
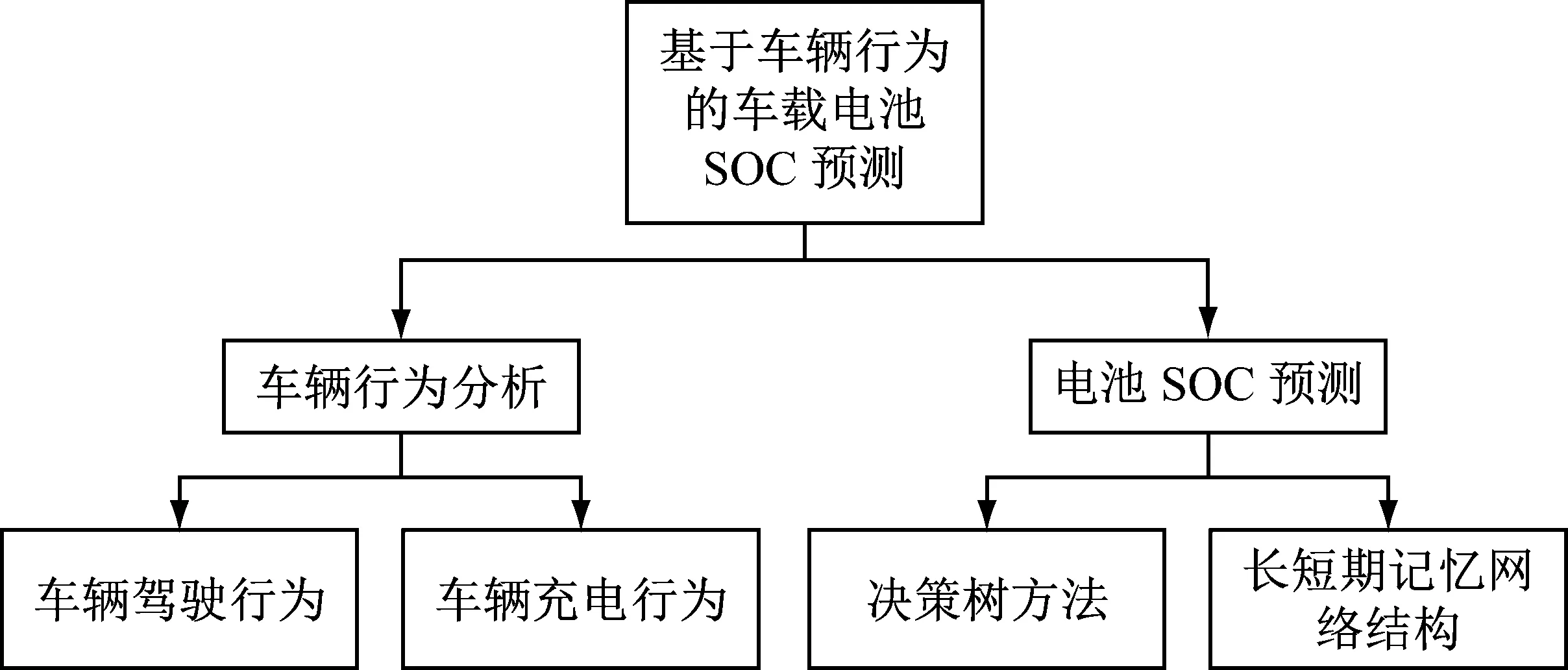
图1 本课题研究内容的系统框架图Fig.1 System framework of this project
本课题的主要研究内容包括以下三部分:
(1) 基于大数据和统计学的方法,分析电动汽车的行为,包括驾驶行为和充电行为;
(2) 结合速度、电池电流电压等信息采用决策树方法进行车载电池SOC的预测;
(3) 结合车辆速度、电池电流电压等信息采用神经网络长短期记忆结构进行车载电池SOC的预测。
2.2 研究方法
考虑到课题内容和庞大的数据量,我们选用的软件工具主要是python;基于本课题的研究内容,主要工作分为以下几块:
1) 数据清洗
本课题提供的数据包括:数据采集时间、累积行驶里程、速度、电机控制器温度、驱动电机转速、驱动电机温度、电机母线电流、加速踏板行程、制动踏板状态、动力系统就绪、电池剩余电量(SOC)、电池剩余能量、高压电池电流、电池总电压等共24项数据;但是原数据集存在缺漏、错误,采样时间间隔不一致等情况;因此针对不同的研究内容需对数据进行相应的清洗。
(1) 针对车辆使用情况分析:
基于本研究内容,筛选出五个因素:时间,速度,电池SOC,电池电流,电池电压;主要根据速度和电池电流这两个因素,将车辆状态划分四种:正常行驶、制动行驶、停车、充电。
(2) 针对SOC的估计和预测:
由于原数据集的采样时间不一致,根据数据的实际情况,将车辆正在行驶并且采样时间为20s的数据切割出来。
2) 基于大数据和统计学的方法析车辆的使用情况
电动汽车行为的动态特性非常强[3],为分析出车辆的使用情况,我们采用分时间段来统计分析。
针对车辆驾驶行为,从每小时的平均速度和每小时的车辆使用率进行统计分析;针对车辆的充电行为,考虑车辆充电的四个重要参数:充电时长,开始充电时间,开始充电时的SOC,充电结束时的SOC。
3) 采用决策树回归模型实时预测车载电池SOC
XGBoost是由 Tianqi Chen http://homes.cs.washington.edu/~tqchen/ 最初开发的实现可扩展,便携,分布式 gradient boosting (GBDT, GBRT or GBM) 算法的一个库,可以下载安装并应用于 C++,Python,R,Julia,Java,Scala,Hadoop,现在有很多协作者共同开发维护[8]。XGBoost被广泛用于kaggle等数据科学竞赛中,取得了很好的效果。
GB是指Gradient boosting,就是通过加入新的弱学习器,来努力纠正前面所有弱学习器的残差,最终这样多个学习器相加在一起用来进行最终预测,准确率就会比单独的一个要高。之所以称为 Gradient,是因为在添加新模型时使用了梯度下降算法来最小化的损失。而XGBoost是采用决策树(CART )的GB 的高效实现。
在具体操作中,将每一时刻的参数值和前一时刻的soc值作为输入值,将该时刻前后时刻的soc差值的一半作为输出,借助马尔可夫假设将预测问题转化为回归问题,训练决策树群。
4) 采用长短期记忆网络模型预测车载电池SOC
综合考虑车辆的驾驶行为,准确预测车载电池SOC是目前一大重要课题。准确预测车载电池SOC能指导驾驶员在电量低时进行车辆充电,若能结合具体的地理位置信息并且知道地理上充电站的分布情况,可以为电动汽车充电提出针对性的方案,从另一个角度也能为电动汽车充电站选址做出贡献。当前对车辆SOC预测的研究主要包括:电池建模法[4]、状态转移法[5]、神经网络 [6] 等方法。电池建模法需对电池进行充放电实验得到准确的电池模型而后进行SOC预测,但现实中很少有实验室有条件对车载电池进行充放电,因为电池实验存在较大的危险性。由于车辆驾驶行为动态特性非常强,而且数据量庞大,本课题中对SOC的预测采用基于神经网络的方法。我们将其看着时间序列[7],采用循环神经网络中的长短期记忆网络结构进行车载电池SOC的预测。
5) 判断准确率的指标
由于原样本中的SOC数值的最小单位为1%,所以当估计或预测的SOC与真实值之差小于1%时,那么认为该估计或预测的SOC是准确的,否则为错误的,准确率的计算公式如下:
准确率=样本中SOC准确估计的点数/总样本点数*100%
3 研究成果
3.1 数据清洗与切割
在本课题中,我们主要研究电动汽车的行为和车载电池SOC,因为选用100辆纯电动汽车数据进行分析,选用的数据有五维,包括时间、速度、SOC、电池电流和电池电压。
1) 针对车辆行为分析
针对车辆行为,我们根据车辆速度和车载电池电流这两个因素,将车辆状态划分四种:正常行驶、制动行驶、停车、充电,对原数据进行分类,分别添加标签1,2,3,4。由于车辆行为的动态特性比较强,为准确分析出其行为,采用分时间段的方式进行统计分析,每个时间段为1小时。图2显示的是数据集中车辆四种状态的比例。
2) 针对SOC的估计和预测
为了准确估计和预测车辆驾驶时的车载电池SOC,考虑到实际场景,选择了有连续监控的片段。连续监控意为这些片段,包含了正常行驶、充电和停车怠速。因此还需要删除充电,即电量增加的片段。从200辆车的样本中筛选出294个样本。每个样本的时间长度为500,也即包含了500*20 s总计10 000 s的数据。图3显示是样本数据中SOC随时间变化的情况。

图2 数据集车辆正常行驶、制动行驶、停车、充电四种行为的比例Fig.2 Proportion of four behaviors: driving, braking, parking, and charging
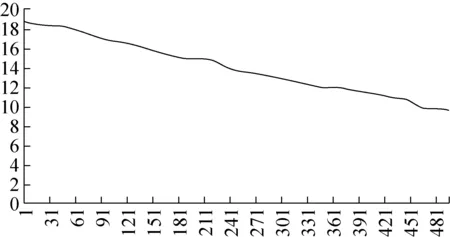
图3 样本数据中soc随时间的变化情况Fig.3 SOC changes over time in sample data
样本的其他统计量如下:

统计量平均速度平均soc初值平均soc终值平均soc消耗均值30.432.120.911.2
样本统计量结果和数据来源——城市低速工况下的电动车先验一致,初步认为采样合理。
3.2 车辆行为分析结果
由上面的分析可知,我们将车辆行为分为四种:正常行驶、制动行驶、停车、充电。
1) 车辆驾驶行为分析
车辆的驾驶行为主要考虑两个:平均速度和车辆使用率;图4和图5分别显示了每小时内车辆使用率和车辆的平均速度曲线。从图4中可以看出曲线中出现两个车辆使用高峰期,分别是在8点和18点左右,与人们日常的上下班高峰出行情况相符合,深夜的车辆使用率最低,也符合人们日常的出行情况;这曲线明显展示出了一天中人们对电动汽车的使用需求情况。但从图4中我们也看出车辆在高峰时期的使用率仅为50%,可见车辆还未充分利用。若此信息结合地理位置信息,可以对不同地区进行合理的车辆数量配置以及合理的跨区域调度车辆等,以充分利用车辆满足人们的绿色出行。
图5中显示的每小时车辆的平均速度,该信息在一天中的变化不大,其主要的可能原因是采集数据的车辆是共享汽车,主要在城市内部驾驶,无法反应出高架上车辆的驾驶情况。

图4 每小时车辆使用率情况Fig.4 Hourly vehicle usage

图5 每小时内车辆的平均速度Fig.5 Average speed of the vehicle per hour
2) 车辆充电行为分析
针对车辆的充电行为,主要考虑车辆充电的四个重要参数:充电时长,开始充电时间,开始充电时的SOC,充电结束时的SOC。图6中展示的时一天中电动汽车开始充电时间点的分布情况,从图中可以看出,在晚上电动汽车开始充电的车辆数比较多,在凌晨5点开始充电的电动汽车数量比较少,不到1%;曲线上的数值表示的该时间段内开始充电的平均充电时长,晚上开始充电的充电时长也比较长,此分布情况基本符合人们日常生活习惯。

图6 一天中电动汽车开始充电时间点的分布情况Fig.6 Distribution of start-charging time during the whole day
图7 (a) 表示的是电动汽车开始充电时SOC的分布情况, 图7 (b) 电动汽车结束充电时SOC的分布情况。从 (a) 中可看出有接近35%的车辆开始充电时的SOC低于20%。电池SOC低于20%会严重损耗电池寿命,应避免此种情况。而上面对车辆使用率分析时,最高的车辆使用率不超过50%,可知车辆没法充分合理利用,存在SOC较高的车辆在闲置,而SOC较低的车辆却在使用的现象。从 (b) 中可知接近70%的车辆结束充电时候的SOC超过50%,这与实际情况比较符合,但仍然存在12.67%的车辆在结束充电时的SOC低于30%,应设置合理的车辆调度去规避此类情况的发生。

(a)

(b)
图7 (a) 电动汽车开始充电时SOC的分布情况, (b) 电动汽车结束充电时SOC的分布情况
Fig.7 (a) Distribution of SOC when electric vehicle starts charging, (b) Distribution of SOC when electric vehicle ends charging
3.3 决策树回归模型预测电池SOC
对于预测SOC而言,有两种极端情况,一是后一刻的状态与前一刻毫无关系(HMM模型型),二是后一刻的状态与之前的序列整体相关。真实情况应该介于两者之间。
为验证前者,同时研究数据的分布情况,用决策树进行回归。模型的输入是每一时刻的各项参数和上一时刻的soc值,输出为上一时刻与下一时刻的soc之差的一半。采用了XGBoost进行回归。

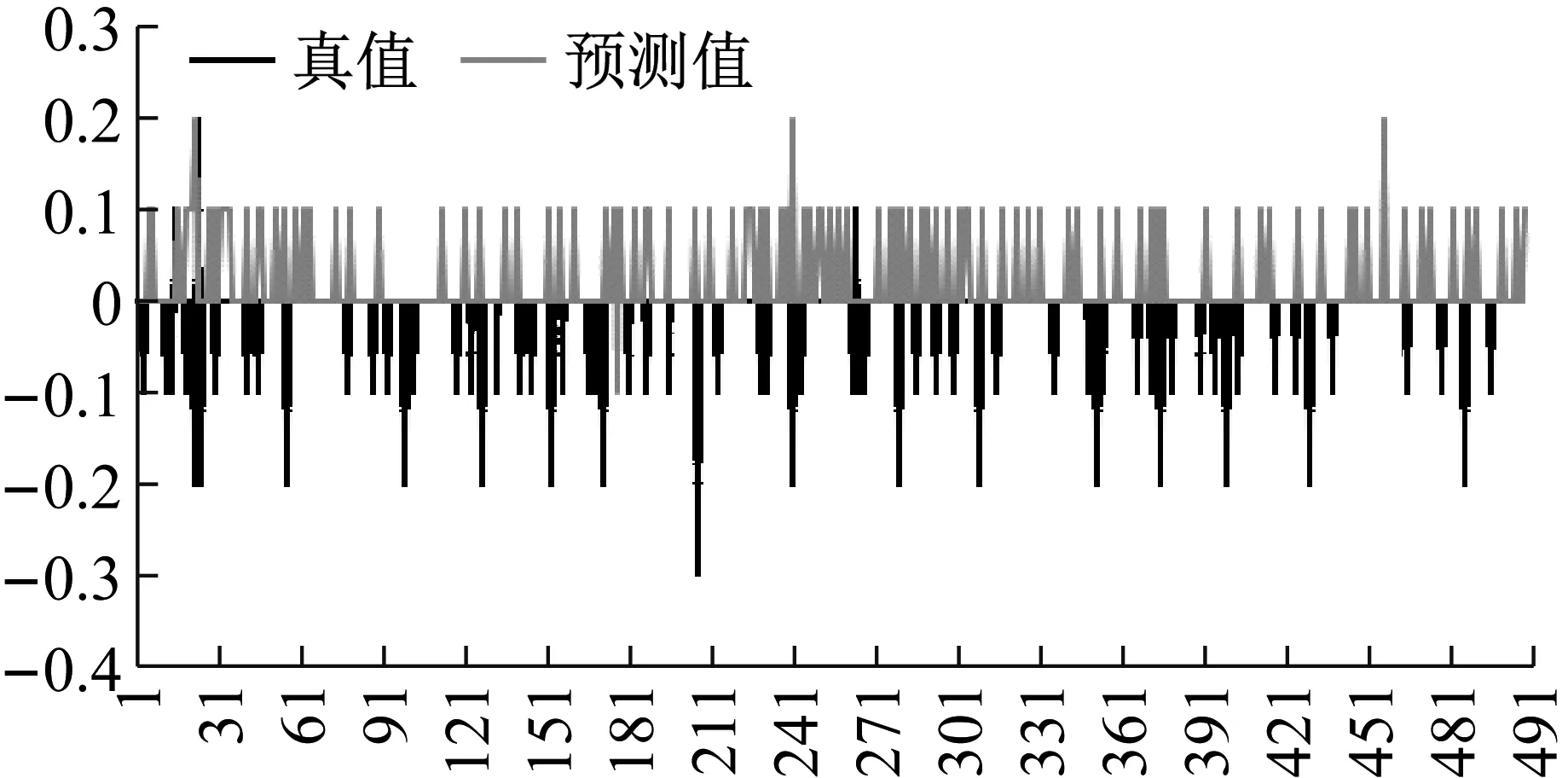
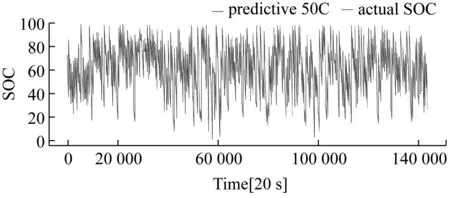
图8 决策树XGBoost回归预测SOC的曲线图Fig.8 SOC Prediction of decision tree XGBoost model
测试集准确率为55.3%,结果不如下文的长短期记忆网络模型,出现了精度欠缺和过拟合。可能的问题是输出数据分布单一。受限于测量精度,soc的变化幅度为1%,要么不变要么突变,导致样本分布不均衡。在大多数输出为0的数据训练下,模型倾向于将输出均为0。
3.4 长短期记忆网络模型预测车载电池SOC
准确预测车辆车载电池SOC是一项关键技术。车辆的驾驶行为对车载电池的SOC影响很大。在本课题中,综合考虑车辆驾驶行为和车载电池特性,进行车载电池SOC的预测,将其看着时间序列,采用循环神经网络中的长短期记忆网络结构进行车载电池SOC的预测。
对于神经网络,主要考虑几个量:神经网络结构、层数、激活函数、学习率。本课题中选用的长短期记忆结构有三个门:输入门、遗忘门和输出门,这些“门”结构让信息有选择性地影响循环神经网络中的每个状态。“门”结构使用sigmoid函数作为激活函数,全连接神经网络会输出一个0到1之间的数值,描述当前输入有多少信息量可以通过这个结构。激活函数Sigmoid 如下:
本神经网络中共有三层,包括输入层、隐藏层和输出层。输入层用于接收和分发输入模式,隐藏层描述输入/输出之间的非线性关系。输出层产生期望的输出模式。本神经网络的隐藏层的神经元个数为50。学习率决定了网络中参数每次跟新的幅度,采用指数衰减法。输入特征包括:车辆速度、电池电流 电池电压、电池历史SOC; 输出为电池20s后的SOC,移动窗口长度为10。其公式为:
SOCk+1=fNN(Vk-h+1,…,Vk;Ik-h+1,…,Ik;Uk-h+1,…,Uk;SOCk-h+1,…,SOCk)
这里h=10.
由于这五维数据特征表达不一致,先将五维数据进行归一化处理,再进行神经网络的训练。
(1) 预测20 s后车载电池SOC
根据历史车辆速度曲线和历史SOC预测下一时刻SOC,预测结果如9图所示。绿色曲线是训练集的原数据,蓝色曲线是测试集的原数据,红色曲线是预测曲线。
(a) 训练集上的SOC预测曲线
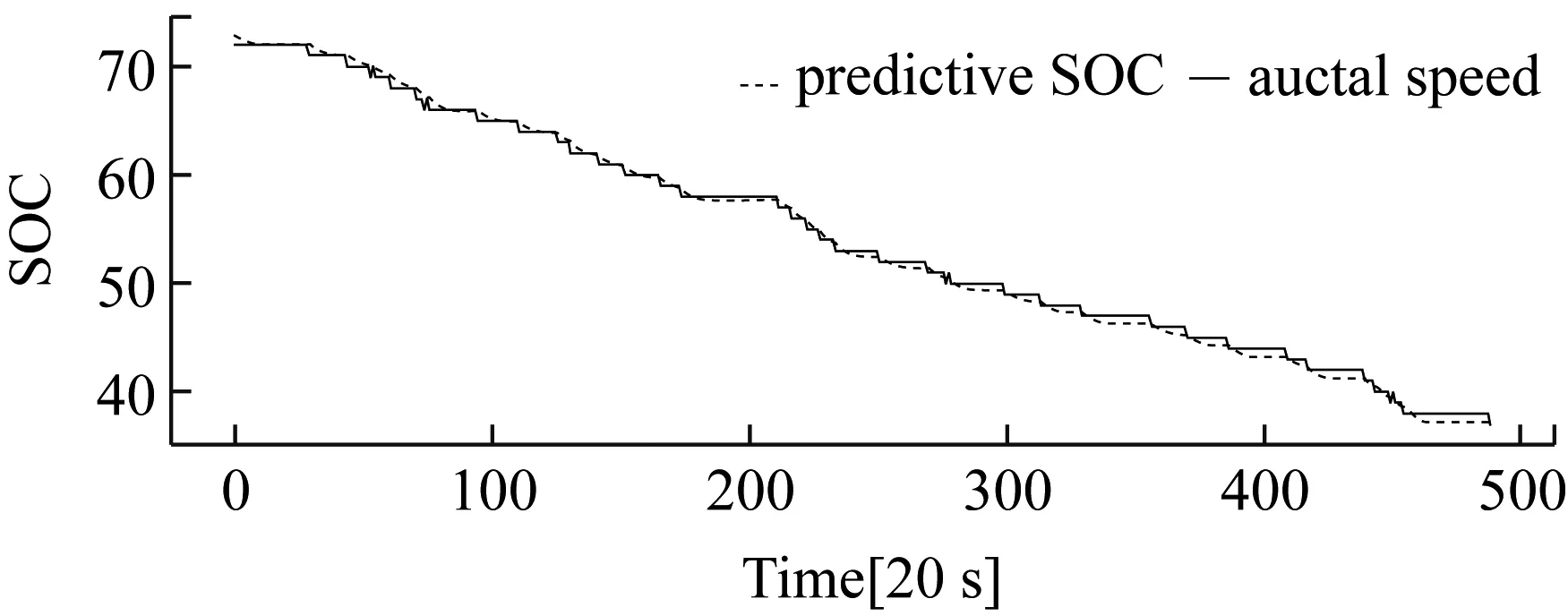
(b) 测试集上的SOC预测曲线
根据2.2中准确率指标的计算公式来计算可知,训练集中SOC预测的准确率为93.90%;测试集中SOC预测的准确率:98.38%。
(2) 预测300 s后车载电池SOC
采用长短期记忆网络模型预测10分钟后的车载电池SOC,移动窗口长度h为60,其公式为:
SOCk+n=fNN(Vk-h+1,…,Vk;Ik-h+1,…,Ik;Uk-h+1,…,Uk;SOCk-h+1,…,SOCk)
这里h=60,n=30, 每隔20 s一个数据点,间隔30个点就是10分钟
根据历史车辆速度曲线和历史SOC预测10min后的SOC,预测结果如下所示。绿色曲线是训练集的原数据,蓝色曲线是测试集的原数据,红色曲线是预测曲线。

(a) 训练集上的SOC预测曲线

(b) 测试集上的SOC预测曲线
根据2.2中准确率指标的计算公式来计算可知,训练集中SOC预测的准确率为75.06%;测试集中SOC预测的准确率:73.10%。预测10分钟后的SOC的准确率降低从侧面反应出车辆驾驶行为的动态特性非常强,很难做到长时间预测。
4 创新点
(1) 基于大数据和统计学的方法,分析电动汽车的行为,包括驾驶行为和充电行为;并从中得出相应规律;
(2) 综合考虑车辆的驾驶行为和充电行为,结合车辆速度、电池电流、电池电压、电池历史SOC等信息,采用决策树和神经网络中长短期记忆网络这两种方法进行SOC预测,并对对比两种方法的预测结果。决策树预测SOC的准确率为55.3%,而长短期记忆结构预测SOC的准确率高达98.38%。
(3) 综合考虑车辆的驾驶行为和充电行为,结合车辆速度、电池电流、电池电压、电池历史SOC等信息,采用循环神经网络的长短期结构进行一定时间内的车载电池SOC的预测, 预测的10分钟后的SOC准确率为73.10%。
5 结语
随着智能交通和大数据技术的发展,汽车的智能化、电动化、网联化、共享化成为未来汽车发展的新趋势。本课题以“上海市新能源汽车公共数据采集与检测平台”采集的大数据为基础,以纯电动汽车为研究主体,以车载SOC为主要研究对象,用数据驱动的方法分析车辆行为规律,包括车辆驾驶行为和充电行为。车辆驾驶行为主要考虑运行中的车辆平均速度和车辆的使用率。车辆充电行为包括充电时长、开始充电时间、结束充电时间、开始充电时的SOC和结束时的SOC。从车辆行为分析,我们得出结论:共享电动汽车使用率偏低(不足50%),却有接近35%的车辆开始充电时的SOC低于20%,因而应对不同地区进行合理的车辆数量配置以及合理的跨区域调度车辆。
此外,SOC的准确估计和预测是保证电动汽车可靠运行的前提。针对车辆驾驶过程中车载电池SOC,采用了决策树的方法和神经网络长短期记忆网络进行SOC的回归预测,并对比两种预测方法的结果。预测20秒后的SOC,采用决策树XGBoost进行回归预测的准确率只有55.3%,而长短期记忆网络预测SOC的准确率高达98.38%,可见长短期记忆网络的预测模型更好。预测10分钟后的车载电池SOC,预测准确性为73.10%。预测10分钟后的SOC的准确率降低侧面反应出车辆驾驶行为的动态特性非常强,很难做到长时间预测。下一步的工作主要考虑优化预测长时间后的车载电池SOC的模型,进一步提高预测的准确率。