LTE中基于TA测量的终端定位研究*
2019-09-04王冬海
张 海,王冬海
(杰创智能科技股份有限公司,广东 广州 510663)
0 引 言
定时提前(Timing Advance,TA),一般用于终端(User Equipment,UE)的上行传输,指为了将UE上行包在希望的时间到达基站(Evolved NodeB,eNB),预估由于距离引起的射频传输时延,提前相应时间发出数据包。上行传输的一个重要特征是不同UE在时频上正交多址接入(Orthogonal Multiple Access),即来自同一小区的不同UE的上行传输之间互不干扰。
为了保证上行传输的正交性,避免小区内干扰,eNB要求来自同一子帧但不同频域资源的不同UE的信号到达eNB的时间基本上是对齐的。eNB只要在循环前缀(Cyclic Prefix,CP)范围内接收到UE所发送的上行数据,就能够正确地解码上行数据,因此,上行同步要求来自同一子帧的不同UE的信号到达eNB的时间都落在CP之内。
TA物理表征的是UE与天线端口之间的距离。1Ts对应的时间提前量距离等于(3×108×1/(15 000×2 048))/2=4.89 m。含义就是距离=传播速度(光速)×1Ts/2(上下行路径和)。TA命令值对应的距离都是参照1Ts来计算的。如果TA=1,那么

表征的距离为16×4.89 m=78.12 m,同时可以计算得到在初始接入阶段,UE与网络的最大接入距离,即小区最大半径1 282×78.12 m=100.156 km。
既然TA可以表示发送上行信号的终端和接收基站的距离,就可以通过非合作接收技术从空口无线信号接收上下行信号,并利用TA特性对终端实现精确定位。
1 定位原理
1.1 基站发送TA时机
第一种情况是随机接入过程中,通过随机接入响 应(Random Access Response,RAR) 的 Timing Advance Command字段发送给UE。这种情况下,eNB通过测量接收到的preamble来确定TA值,RAR的Timing Advance Command字段共11 bit(如图1所示),对应TA索引值的范围是0~1 282。这个过程为可以称为初始上行同步。
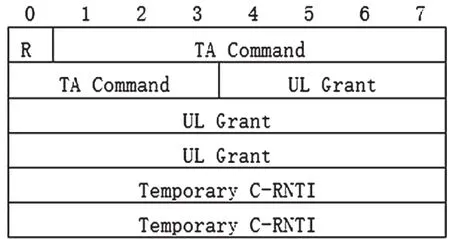
图1 RAR帧格式
第二种情况是业务进行中的TA调整。虽然在随机接入过程中,UE与eNB取得了上行同步,但上行信号到达eNB的timing可能会随着时间发生变化,比如高速移动中的UE,其与eNB的传输延迟会不断变化;还有当前传输路径消失,切换到新的的传输路径。例如在建筑物密集的城市,走到建筑的转角时,这种情况就很可能发生;还有UE的晶振偏移,长时间的偏移累积可能导致上行定时出错;另外,由于UE移动而导致的多普勒频移也会导致同步偏差。因此,UE需要不断地更新其上行定时提前量,以保持上行同步。TA命令的信息为6 bit,即TA的范围在0~63之间。TA命令表征Nta的调整量。

时间提前量值可能为正或为负。由TA调整量式(2)可知,调整正向最大TA距离为32×16×4.89 m=2.5 km,调整负向最大的TA距离为-31×16×4.89 m=-2.42 km,调整的精度为78.12 m。
1.2 TA定位原理
根据TA值的定义可知UE离基站的距离为初始值经过调整后的值,假定该值为TA。当定位基站后,UE的位置为以基站为圆心,以TA为半径的圆上。但由于eNB给出的UE的TA值是一个精度为78.12 m的范围值,因此准确UE定位在以基站为圆心,以TA为中心半径,以78.12 m为宽度的圆环上。如图2所示。
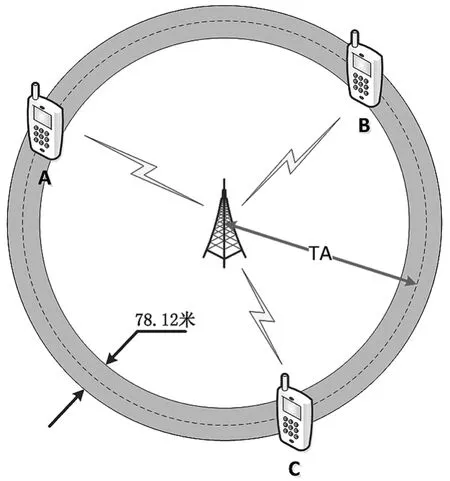
图2 终端UE到基站的位置
当以基站为原点,UE的位置为(x,y),则UE的定位满足如下不等式:

由于UE是在图1的圆环上的位置,可以是A点、B点或C点或是圆环上的任意一个点上,假定TA为2 km,根据式(3)可计算出终端在约100万平方米的圆环上,因此单依据该值是无法准确定位到终端UE。
为进一步提升定位的准确性需要增加接收机R,将接收机R置于确定的位置(x1,y1),再监控接收UE的上行信号到达R的时刻t1,根据监控到目标UE的TA值可以准确的计算出目标的发送时刻范围t2,如图3所示,目标UE的位置定位满足如下等式:

其中,c为光速3×10^8 m/s。
由于t2是一个范围值,则t2时间传输的最大与最小值间的差距为78.12 m,t1及t2的测量准确度为30.72 Ms/s采样误差。即t1与t2间测量的误差小于2×(3×108×1/(15 000×2 048))=19.56 m。因此式(4)右边的

最大值与最小值间的最大差异为97.68 m。
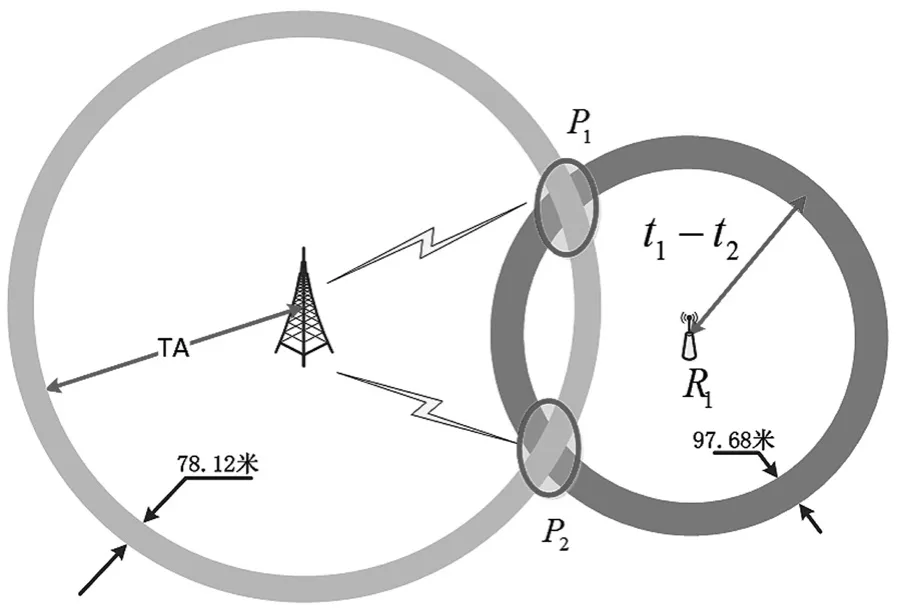
图3 终端在基站与接收机联合下的定位
通过引入定位接收机R联合TA的定位方式,使目标终端的位置变为P1或P2区域的位置(2个圆环交际区)。P1近似面积为0.76万平方米,此时定位的面积精度是只通过TA定位精度的65倍。即定位目标时间消耗在理论值上为原来的1/65,且定位的区域大小将不受TA值的影响。
通过调整定位接收机R1的位置,再次测试目标UE的上行信号,如图4所示增加一次接收机R2测试,可有效排除P1和P2中的一个区域,进一步提高定位精度。
2 TA测量
2.1 UE上行信号
UE在发上行信号前,UE已经处于下行同步,即UE已经通过监控eNB的下行广播或系统信息等信道已经与eNB进行了同步,但此时UE不清楚接收的下行同步信号由于传输距离经过多长时间从eNB传递给UE的,UE还无法判断需要多大的定时提前量TA,因此第一次时,UE会以固定的定时提前量TA发送随机接入请求PRACH(Physical Random Access Channel,物理随机接入信道),在eNB端接收到该用户的PRACH后,eNB端需要做同步,由于PRACH占用的带宽为1.25 kHz×839=1 048.75 kHz,当采用30.72 MHz的采样率时,需要做16倍的抽取转换到1.92 Ms/s,在PRACH的0.8 ms时间内采样的点数由24 576个抽样到1 536个点,因此当采用FFT变换后,每个采样点的的频率为1.92 MHz/1536=1.25 kHz,恰好和子载波间隔相等,当做PRACH的ZC序列同步时,只需要同步中间的839个子载波。且同步后同步的精度为1个样点,即1/1.92 MHz的时间精度,映射到传输距离为3×108×1/1.92×106m/2=78.12 m,当采用 PRACH进行测量时,测量精度只有78.12 m。

图4 3点定位算法示意图
eNB在完成目标UE的PRACH同步后,通过同步位置在时域上的指示即知道UE的上下行路径传输延时总和,从而在RAR(MSG2)中将TA值下发给目标UE,UE根据收到的TA值调整发射的时间窗口。最终实现UE同时到达eNB。
根据1.2节TA定位原理,只需要UE发送上行信号即可实现定位功能,如可检测上行信号PUCCH(Physical Uplink Control Channel,物理上行链路控制信道)/PUSCH(Physical Uplink Share CHannel,物理上行共享信道)/SRS(Sounding Reference Signal,信道探测参考信号)/DMRS(Demodulation Reference Signal,解调参考信号)/CQI(Channel Quality Indicator,信道质量指示)等,由eNB给出UE的绝对参考定位位置,然后通过定位接收机的相对时延进一步准确锁定UE位置。
2.2 TA估计
基站位置估计可以采用3种方法:
第一种采用已知UE位置计算基站位置的反向TA定位方法,即采用定位接收机发送随机接入请求,基站返回RAR中TA值来确定基站位置,由于定位接收机可以采用GPS(Global Positioning System,全球定位系统)做设备自身定位。通过调整定位接收机的位置形成3点定位基站的方法估计出基站位置。
第二种为TDOA(Time Difference of Arrival,到达时间差)方法,即采用带GPS秒脉冲定时的双定位接收机检测从基站发出的同一信号的时间差。

图5 双曲线定位(TDOA)
将两台接收机放置在已知位置,这两台接收机的位置相当于双曲线的两个焦点,基站发出的信号到2个接收机的信号时延差t1-t2(通过标准GPS定时参考,可得基站发出的信号到接收机的时间与参考间的时间差分别为t1,t2)的距离(t1-t2)×3×108是一个常量,标记为2a,两台接收机的距离|A1-A2|为常量,标记为2c,则基站的位置(x,y)即为双曲线一侧,满足如下等式:

当将A1接收机移动到A3时,再次检测基站到2个接收机的时间差即得到第二条双曲线,该曲线为在将标准坐标轴旋转一定角度后得到的坐标轴上,2条双曲线的交点即为基站的准确位置P1,即如图5所示的双双曲线交叉点P1。
第三种方法为简单的测量下行信号强度和观察基站塔天线定位基站。该方法在郊区和农村等开阔地区较为可行,但在城市环境下由于建筑密集且天线较为隐蔽,较难发现基站并准确定位。
接收机对相对时延估计为目标用户到接收机距离的估计,由于接收机与目标UE都同步于同一个基站的下行信号,为补偿接收机与目标UE离基站的距离不一样,需要对接收机补偿TA1(接收机)-TA2(目标UE)的时间差。接收机需要提前或延后TA1-TA2的时间启动定时器,当TA1-TA2是正值时,需要提前,当TA1-TA2是负值时,需要延后启动目标发送信号的起始值定时器。当启动定时器后,采用信号的相关算法,检测目标UE的特征信号,如SRS/DMRS等信号,通过在本地产生一个与被检测信号相同的信号序列,再讲本地的信号序列与接收的信号序列进行相关,找到最大的相关峰值,即实现被检测信号序列的同步,根据峰值的位置和信号采样率即可计算出相对时延估计,如图6中所示T1-T2。
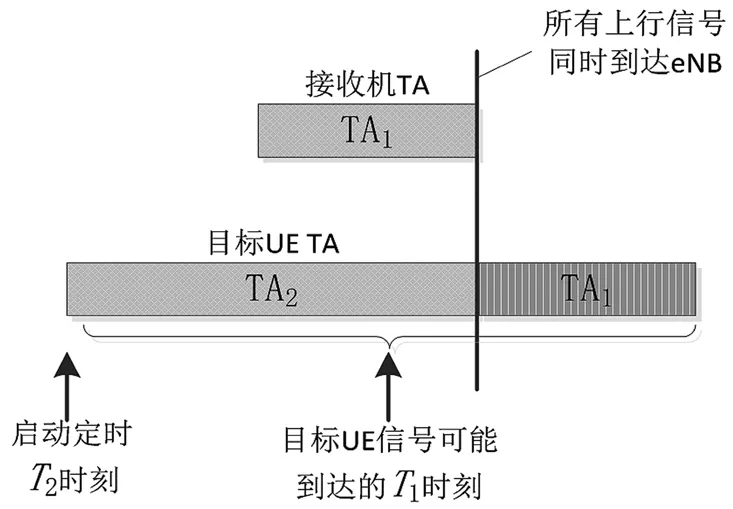
图6 接收机相对时延估计
2.3 误差分析
定位误差主要表现在参考信号的准确性,如基站定位的精度误差影响整个TA定位的基准,但该基站定位如果采用文中的方案一、则对其影响的主要因素为GPS对接收机的定位准确性、TA定位的基础误差78.12 m的准确性,以及多次TA定位的综合误差等。若采用方案二的基站定位,则GPS定时的准确性,设备间距离测量的准确性,甚至设备内部的数据的处理相位等都是引起误差的因素。
定位接收机的定位误差主要是定时提向量的计算的引入的TA采样误差,其次是对目标UE上行信号采集时,是否可以采用高速采样(解决定位精度问题),且在高速采样下有较好的信号相关性,从而准确的提取出信号的同步及时延等信息。
另外,实际的环境一定是多径传输的,多径传输的干扰也会产生严重的定位误差,采用定位接收机在相同的地点测试多次时延差值和在不同的地点测试来降低多径的影响,但很难消除。
2.4 技术难点
目标用户确认是定位的难点,在不影响目标正常通信的情况下,如何区分空中的无线空口信号是指定的目标信号,由于当前LTE在正常的通信过程中很少直接暴露通信双方的身份信息,取而代之的是 TMSI(Temporary Mobile Subscriber Identity, 临时移动用户标识),而且想查看目标的信息内容需要执行双向鉴权,内容查看也行不通。只能通过在鉴权前的一些信令信息解决目标身份确认的问题。如寻呼过程、监控PRACH、RAR等过程提取TMSI等用户临时标志用于目标用户区分。
3 结 语
基于TA的终端UE定位由于系统相对较为简单,不必解析LTE中众多的信令过程,只需要解析RAR中的相关参数即可得出TA的值,从而得到大致的目标位置,通过进一步的采样终端的上行信号,检测到达的时间差即可更准确的定位到终端UE。且整个过程不影响终端UE的通信,对用户无干扰,因此该方法在公共安全领域具有很大的应用价值。
