智能实验动物运动训练转笼装置的制作及应用
2019-09-03袁洪霞袁春风石国凤张真容刘小亮
袁洪霞, 袁春风, 石国凤, 闫 冰, 张真容, 刘小亮
(1.贵州中医学大学 护理学院,贵阳 550002; 2.贵州航天智慧农业有限公司,贵阳 550000)
0 引 言
实验动物是生命科学研究的基础和条件,也是提升人类健康与优化人类生存条件的重要保障[1],而运动则是促进健康的主要手段和方式,在运动过程中,动物可以产生积极的系统生物学效应,伴随着运动生物科学的不断发展,运动训练在实验动物研究中的应用越来越多[2],主要从实验动物的整体水平或局部器官和组织进行研究,为探索运动对生理和病理的作用,如研究运动与损伤神经的可塑、代谢、增强免疫功能和与预防心脑血管病等的实验动物研究[3-4]。然而在动物运动实验的研究过程中,如何规范运动方式以及在无外界刺激和弱刺激下如何驱使动物以保证动物按照理想程序要求进行运动是实验动物研究者的一个难题,为此课题组成员在进行研究基于miR-206对BDNF的调控探讨康复运动促进脑梗死大鼠运动功能重建的机制的实验中结合参考国内外前人的一些资料的基础上,自制了一种智能小型实验动物运动训练转笼装置,本文主要从转笼的构造、应用方面进行简单描述。
1 实验动物常见运动装置
通过参考前期关于实验动物运动训练的研究,实验动物运动装置主要包括平板跑台运动(Treadmill running),小鼠游泳运动(S,rinmling),跑转笼运动(Runningwh,wheel),以及平衡杆行走训练(beam-walking test)等,在研究过程中为使动物能进行持续运动或按研究程序运动,大部分运动方式需要食物的诱导及电刺激等对动物的伤害性较大的强迫刺激下驱使动物运动,以及需要人为辅助的驱动而进行运动[5-8]。姚璐等[9]对跑台运动的研究中发现,跑台通道的后壁安装有刺激电极,过多的电刺激会引起调节生理上的变化,如肾上腺素升高。Ofira等[4]采用跑步机运动训练对大鼠外周免疫调节的研究中,同样在跑台上安装电刺激保证大鼠的持续运动。关于对实验动物进行游泳运动方式的研究报道发现,实验动物在进行游泳运动前需要适应该训练方式以及水温度,并且需要将水温控制在一定的范围以免造成不良反应,因为水温是一个非常重要的因素,会影响到运动时的心率、氧耗、血乳酸浓度。并且有研究报道,大鼠游泳至力竭血乳酸水平非常高,可达 152 mg% ,可能与游泳方式不能浮出水面一段时间力竭的状态有关[10-11]。周媛媛等[12-13]的研究采用的仍是手摇柄转动滚筒式转笼,手摇式转笼难以保持匀速转动,并且需要耗费大量的人力及时间。
2 智能实验动物运动训练转笼装置的结构与制作
智能转笼装置其结构主要由(见图1)定时器、控制器、微电机减速器、转笼及机架组成。
(1) 定时器。定时器是一种用来计时的装置,在转笼装置上安装定时器是当转笼开始转动时点击开始按钮并开始计时,达到设定的运动时间时自动报警,以便可以精确记录动物运动时间。
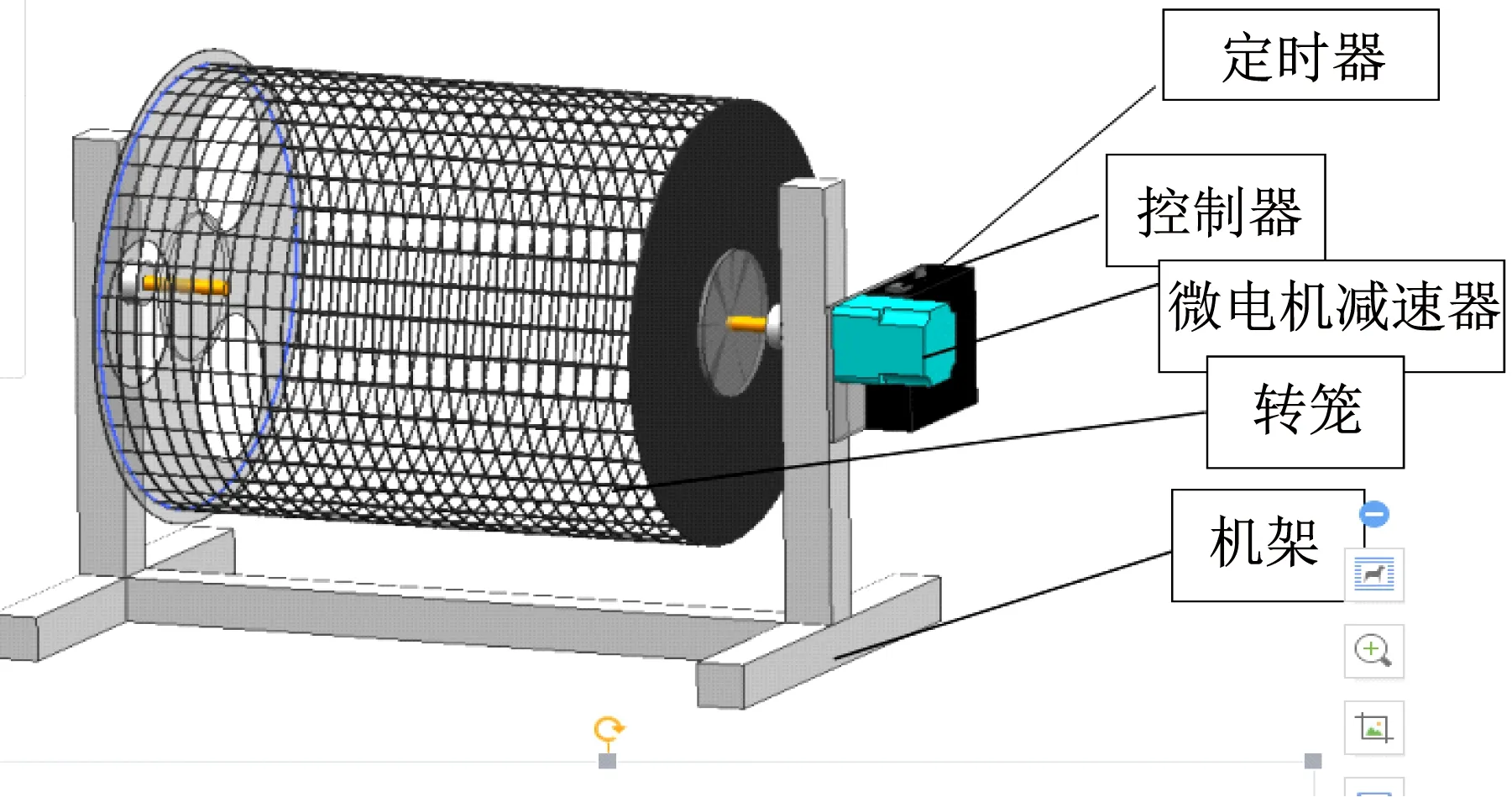
图1 转笼的结构组成图
(2) 控制器。控制器是控制电动机转速和正反转的装置,主要由适配器、PWM脉宽调速器、KCD转换器组成。在使用时,直接插入家用220 V交流电即可,PWM脉宽调速器可将电动机转速控制在4~6 r/min范围[13],KCD转换器实现减速器的转向,可以使动物分别进行逆时针方向运动和顺时针方向的运动。
(3) 微电机减速器。微电机减速器是转笼的动力装置,是由一个7.5 V的直流电动机,多级减速齿轮以及壳体组成,使用电压远低于人体安全电压(36 V),安全性高,具有低能耗,大扭力的特点,输出额定转速为6 r/min。
(4) 金属网状滚筒笼子。金属网状滚筒笼子是该装置的主体部分,采用Q235的底面直径为28 cm,高35 cm的圆柱状桶,开口端使用透明亚克力板封闭,使跑笼框体形成封闭空间,框体两端分别有一根紧固的转动轴,安装于机架两端的轴承内。转笼结构简单,质量轻,框体的结构强度高,方便实验者的观察。
(5) 机架。由铝型材组合而成,结构简单,能快速组装和拆卸,质量轻,结构稳固。
该装置的金属笼可以随着实验研究动物的体积和重量的不同需要从而更换笼子的大小和材质,其他原理不变,可以用于小动物如小鼠、仓鼠等的运动训练,也可以用于中等大小的动物如大鼠、兔子等的运动训练。跑笼通过驱动装置带动笼体转动进而强迫笼体内的动物进行跑步锻炼,跑笼设置转速范围以及定时器,解决了传统转笼不能有效的维持运动强度以及不易对运动速度、训练时间的设定等一系列问题,设置的正反转动有利于训练实验动物的应变能力和方向适应能力。该转笼可作为研究实验动物模型运动训练装置。
3 智能实验动物运动训练转笼的应用
运动训练:实验动物用雄性SD大鼠,体质量为250~300 g,将大鼠置于金属笼子中,转动笼子观察康复运动促进脑梗死大鼠运动功能重建研究,并采用改良线栓法制备局灶性脑缺血大鼠即脑梗死大鼠模型,评定该模型的神经功能变化主要采用的是改良Bederson标准进行神经功能评分[14]:0分-无神经功能缺失体征;1分-提尾时损伤对侧前肢屈曲;2分-前肢屈曲及对侧抵抗力下降;3分-向对侧转圈;4分-意识障碍;1~3分的为脑梗死模型,该模型通过智能转笼装置的电动驱动促进脑梗死大鼠的康复运动,第1天共跑10 min,以开口端为参照,逆时针、顺时针分别转动相同时间,随后每天增加10 min,直至每天跑1 h,前5天转速控制到4 r/min,第6~10天转速设到5 r/min,之后转速设到6 r/min,直至运动到21 d结束,通过循序渐进的运动从而促进脑梗死大鼠的神经功能的恢复,前后对比效果明显。



(A.转笼为逆时针方向转动,大鼠按顺时针方向跑动; B.转笼从逆时针转向顺时针方向,大鼠正在进行适应性的变换方向; C.转笼为顺时针方向转动,大鼠按逆时针方向跑动。)
图2 转笼转动方向和大鼠跑动方向
4 结 语
本文是在为准确记录实验动物运动情况,降低因传统手工转笼带来的数据误差而研制一种通过电能转化为机械能转动的实验动物被动训练装置。以圆柱形金属筛网笼做主体部分,微电机减速器做动力装置,控制器做控制电动机转速和正反转的装置,定时器做记录及固定运动时间的装置。将大鼠置于转笼装置中并启动,可观察到大鼠能随着转笼的不同转动方向和速度的变化而运动,不需要电刺激和食物诱导,根据电能的转化使笼子转动从而带动动物的运动。该转笼是通过驱动装置带动笼体转动进而带动笼体内的动物进行步行锻炼,跑笼设置转速范围以及定时器,解决了传统转笼不能有效地维持运动强度以及不易对运动速度、训练时间的设定等一系列问题;设置正反转动有利于训练实验动物的应变能力和方向适应能力,能完整记录实验动物在转笼中的被动运动情况,可作为研究实验动物模型运动训练装置。