不确定混沌系统的滤波反演自适应滑模控制
2019-09-03崔明月刘红钊赵金姬屈重年
崔明月, 刘红钊, 赵金姬, 屈重年, 刘 伟
(南阳师范学院 机电工程学院, 河南 南阳 473061)
0 引 言
混沌系统作为一种典型的非线性系统,在信息处理、通信保密等方面得到广泛应用。混沌系统的控制问题已经成为研究的热点,许多控制方法被研究人员提出,如反演控制[1]、自适应控制[2]、最优控制[3]等。在众多混沌控制中,跟踪控制就是通过对混沌系统施加控制力,使其输出响应跟踪任意给定的参考信号[4]。
上述混沌系统控制方法大都要求建立被控对象准确数学模型,在工程实际中往往不易实现。因此,当系统中存在参数变化或不确定因素时,系统的鲁棒性就会降低,动态性能也会变差。基于此,一些研究者提出了具有较强鲁棒性与自适应性的混沌控制方法,如:线性反馈控制[5]、基于Laypunov理论的指数控制法[6]、自适应模糊控制[7]、滑模变结构控制[8]等。其中,滑模控制(Sliding Mode Control, SMC)因其对系统参数变化及扰动不灵敏、无需系统在线辨识等优点,被广泛应用于非线性系统控制中,但对于常规滑模变结构控制,高的切换增益以及符号函数的存在是抖振现象产生的根源,从而影响了其在工程实际的应用[8]。为削减抖振现象,对传统滑模控制提出了许多改进措施,如:基于滤波器的滑模控制、动态滑模控制、基于观测器的滑模控制、基于模糊逻辑的滑模控制等[8]。尽管这些控制方法能够在一定程度上降低滑模控制信号的抖振,改善系统的控制性能,但要求系统具有完全能测量的状态,否则上述控制方法将失效[9]。扩张状态观测器(Extended State Observer, ESO)被广泛用于系统的未知状态和不确定项的估计[10]。ESO几乎不依赖于系统模型,且具有很强的抗干扰能力,因此广泛应用于非线性系统控制领域[11-12]。但是,当系统的模型阶数与非线性程度较高时,上述控制方法往往不易实现。而Backstepping设计方法能够将复杂高阶的非线性系统分解成多个低阶子系统,通过选择合适的Lyapunov函数逐步推导出最终的控制律,从而实现对系统的有效控制[13]。
针对状态不可测的不确定混沌系统,本文提出基于ESO的Backstepping自适应滑模控制方法。该方法运用线性ESO对混沌系统的状态与总的不确定性进行估计,然后基于Backstepping策略设计滑模控制器,同时基于Lyapunov稳定性理论设计滑模控制律与切换增益的自适应更新律。通过一个滤波器获得虚拟控制量的导数,避免微分项述的膨胀,大大简化控制器的设计过程。
1 问题描述
考虑如下不确定非线性混沌系统:
(1)
假设状态x1,x2,x3不能直接测量但可观测,非线性函数f1(x1,x2,x3),f2(x1,x2,x3),f3(x1,x2,x3)未知可微,对状态x1,x2,x3各阶偏导存在且连续。
混沌系统具有较强的非线性,对初值非常敏感,且系统的状态不易获得,许多常规的控制策略已不能满足控制效果。本文的目的在于针对状态不可测的不确定混沌系统(1)设计一个ESO与自适应滑模控制器,实现混沌系统状态x1的稳定跟踪控制。
2 控制器设计
2.1 模型变换
由于未知函数f1(x1,x2,x3)对x1,x2,x3的各阶偏导连续可微,故可构造函数:
(2)
设计如下坐标变换:
(3)
由前面假设可知,未知函数g(x1,x2,x3)对状态x1,x2,x3连续可微,故可将式(1)变换为如下严格参数反馈系统:
(4)
为了对混沌系统进行控制,将控制输入u加入系统,同时考虑系统的外部扰动,系统(4)可写为
(5)
式中:u为控制输入;b为控制输入增益;
d(t)为系统未知的外部扰动。为了便于设计观测器与控制器,将式(5)写为如下等效形式:
(6)
式中:
w(x1,x2,x3)=f(x1,x2,x3)+d(t)
为混沌系统总的不确定性。
2.2 不确定性的估计
ESO是一种新型的非线性观测器,可以对系统的状态与未知的扰动进行估计[14]。针对式(6)设计如下的4阶线性ESO:
(7)

(8)
定义观测误差向量
(9)
则, 式(8)可写为
(10)
式中:矩阵
(11)
矩阵A的特征多项式为
|sI-A|=s4+β1s3+β2s2+β3s+β4
(12)
由Routh-Hurwitz稳定性判据可知,若式(8)中的系数βi(i=1,2,3,4)满足如下条件:
(13)
则观测误差动态系统(8)渐近稳定, 即ESO观测误差eo收敛至0向量。
2.3 ESO增益的确定
ESO属于高增益观测器,观测器增益βi>0,i=1,2,3,4对ESO至关重要,影响着观测器的收敛速度。运用带宽的概念来确定ESO的增益βi>0,i=1,2,3,4。ESO的期望特征多项式为
λ0(s)=(s+ω0)4=
(14)
式中:ω0为观测器的带宽。
比较式(12)与(14)可得:
(15)
2.4 自适应滑模控制器设计
在对系统(6)的状态与不确定部分进行估计的基础上,规定控制目标是设计一个自适应控制律u,使系统输出y=x1渐进跟踪一个有界参考信号yr,即
(16)
下面基于反演策略设计不确定混沌系统(6)的滑模跟踪控制器。
步骤1定义跟踪误差e1=y-yr=y1-yr,假设参考信号yr充分光滑,由式(6)可知:
(17)
定义Lyapunov函数
(18)
则其沿式(17)的导数为
(19)

(20)
步骤2定义虚拟误差
e2=y2-α1
(21)
则
(22)
由式(17)、(20)、(22)可得:
(23)
由式(22)、(23)可得:
(24)
考虑误差动态方程(22)与(23),将y3暂时作为“控制变量”实现此两式的镇定,定义Lyapunov函数
(25)
则V2沿式(23)和(24)轨迹的导数为

(26)
(27)
步骤3定义虚拟误差
e3=y3-α2
(28)
则e3对时间t的导数为

(29)
由式(27)、(28)可得:

(30)
将式(30)代入式(24), 得:
(31)
将式(23)与(31)代入(29)得:
(32)
式中,
λ3=k1+k2
定义切换函数
s=c1e1+c2e2+e3
(33)
式中:c1与c2为正的常数。则s对时间t求导并考虑式(23)、(31)、(32), 化简为

(34)
式中:
ρ1=c1k1+c2-λ1,ρ2=c1-c2k2-λ2
ρ3=c2+λ3
定义Lyapunov函数
V3=V2+0.5s2
(35)
则

(36)
设计滑模控制律为
h(s+εsgn(s))]
(37)
式中:h>0是设计常数;ε>0为切换增益。
在滑模控制律(37)中,为了削弱控制信号的抖振,更好地克服外部扰动,使系统具有更强的鲁棒性,设计如下的切换增益ε的自适应调整算法:
(38)


(39)
注1如不做特殊说明,上述控制律设计过程中的yi(i=1,2,3)及w均是指其由式(7)ESO得到的估计值。
2.5 稳定性分析
定理1系统(6)在滑模控制律(39)与切换增益适应律(38)的作用下, 设计如式(33)的切换函数, 则闭环系统误差e1,e2,e3渐近收敛到0.
证明定义如下的Lyapunov函数
(40)
则V3对时间t的求一阶导数, 并考虑式(33)、(36)、(38)、(39)可得:

hε|s|=-eTQe-hε|s|
(41)

(42)
通过选择参数h,k1,k2,c1,c2,可使Q的各阶顺序主子式均大于0,从而保证Q为正定矩阵。从而可得
(43)
由式(43)对时间t求导, 得:
(44)
(45)

(46)
证毕
注2由文献[13]可知,系统(6)满足“分离定理”的条件,高增益的扩张状态观测器与自适应滑模控制器设计可独立进行,观测器的收敛性不影响闭环系统的稳定性。
3 滤波器的设计
由反演滑模控制律(37)的设计过程可知,在反推过程中需要反复计算虚拟控制信号的导数,这将导致微分项数的膨胀,使控制律的解析表达式非常复杂。因此,虚拟控制信号的求导通过滤波器,不必要解析求导,反演自适应滑模控制器的实现过程将会大大简化。滤波器的原理如图1所示。

图1 信号的滤波处理
滤波器的状态方程为
(47)

(48)
式中:ζ是滤波器的阻尼比;ωn是自然角频率。

基于ESO的不确定混沌系统的滤波反演自适应滑模控制原理如图2所示。
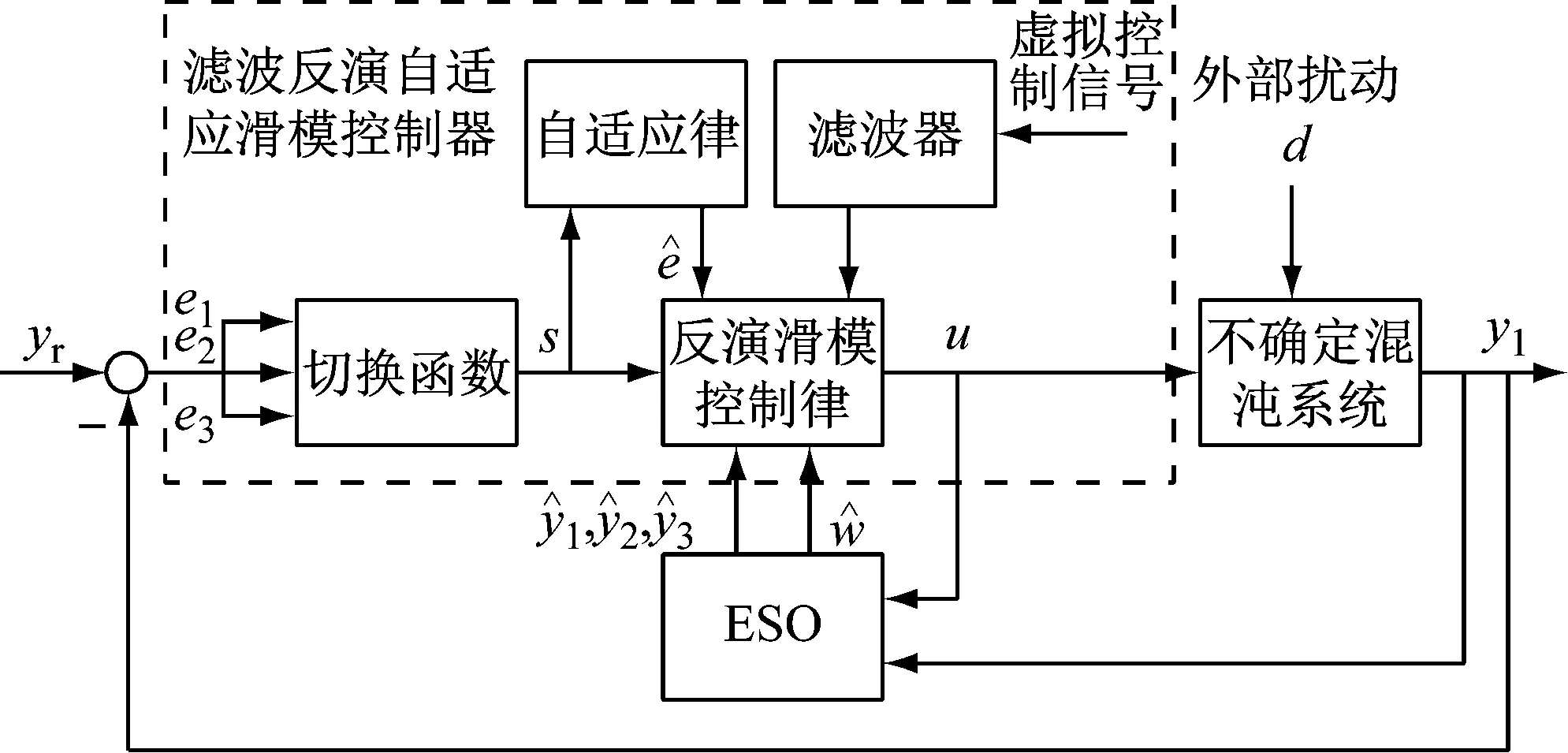
图2 滤波反演自适应滑模控制原理
4 仿真实验
为验证本文所设计的控制策略的有效性, 选择Lorenz混沌系统, 状态方程如下:
(49)
式中: 当δ=16,ρ=49.52,b=4,x1(0)=20,x2(0)=20,x3(0)=50时产生混沌现象, 混沌吸引子如图3所示。

图3 Lorenz混沌系统的吸引子
定义函数:
(50)
由式(2)可得
g(x1,x2,x3)=1 048.32x1-272x2-16x1x3
应用式(2)所示的坐标变换,式(49)可化为
(51)
将控制输入u加入系统, 控制输入增益b取为1, 同时考虑考虑系统的外部扰动,系统(49)可写为
(52)
式中:

为混沌系统总的不确定性, 系统的不确定外部扰动d(t)=2sint。对此系统(52)用扩张状态观测器(6)进行估计。扩张状态观测器的带宽取ω0=60 rad, 观测器增益由式(15)计算得出:
为验证本文所设计控制方法的有效性和优越性, 分别对式(7)、 (38)、 (39)、 (47)表示的基于ESO的滤波反演自适应滑模控制(ESO+ FBASMC)、由式(7)、 (37)表示的基于ESO的常规反演滑模控制(ESO+BSMC)以及PID控制进行仿真实验研究。采样周期都设置为Ts=1 ms, 初始条件均设置为
x1(0)=20,x2(0)=20,x3(0)=50
滑模控制器的参数设置为
k1=70,k2=10,c1=50,c2=10
PID控制参数:比例系数kp=0.75,微分系数kd=0.32,积分系数ki=0.16。
3种控制方法的仿真实验结果如图4~8所示。 由图4~6可知, 3种基于ESO的控制方法均能够有效地控制混沌系统, 并且最终的跟踪误差均为0,PID控
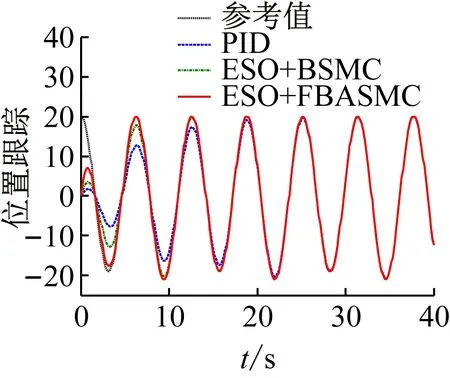
图4 位置跟踪结果
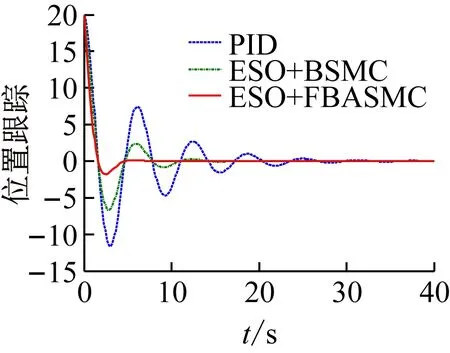
图5 位置跟踪误差

图6 控制输入u

(a) 滤波反演自适应滑模控制的ESO估计误差(b) 反演滑模控制的ESO估计误差
图7 总的不确定性w的估计误差
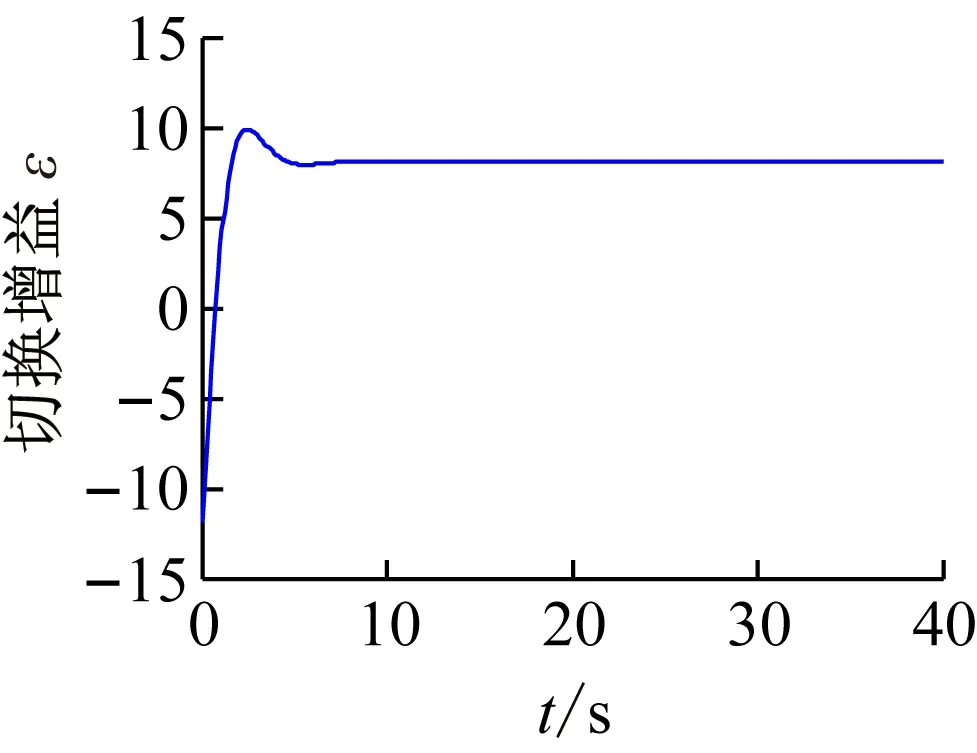
图8 FBASMC切换增益ε的自适应变化过程
制出现了长时间的振荡。进一步对比图5中跟踪误差可知,系统在3种控制器作用下,跟踪误差的曲线发生了剧烈的振荡,PID控制的误差曲线振荡最为剧烈,常规滑模控制的误差曲线的振荡程度次之,反演自适应滑模控制的误差曲线最平缓, 跟踪误差收敛最快, 这是因为常规反演滑模控制方法的切换增益ε是固定值,一旦系统的外部扰动变化时, 控制器便无法这种变化;而对于反演自适应滑模控制方法而言, 由于切换增益ε(t)能够自适应调节,控制器经过更短时间的调整后使跟踪误差快速地收敛到零,而由于混沌系统是非线性程度较强的系统,PID控制的效果最差。
同时, 通过对比图6中3个控制信号可见,滤波反演自适应滑模控制方法在这3种控制信号中幅值是最小的,这也证明了此控制方法能够在一定程度上削减抖振。图7给出的是两种反演滑模控制方法中系统总的不确定部分w的估计结果,结果表明ESO对系统的不确定性具有良好的估计能力。进一步比较图7(a)与图7(b)可知,滤波反演自适应滑模控制方法中的ESO的估计效果要好于常规反演滑模控制中的ESO的估计效果。图8给出了滤波反演自适应滑模控制中切换增益ε(t)的自适应曲线,参数ε(t)最终收敛至8左右,小于常规反演滑模控制方法中直接给定的控制增益ε=12。
5 结 语
本文综合运用反演自适应控制和扩张状态观测器理论,提出了一种状态不可测的不确定非线性混沌系统的自适应滑模控制方法。通过非线性坐标变换,将一般的非线性系统模型变为更适宜Backstepping控制器设计的严格参数反馈形式。设计了线性扩张状态观测器估计系统未知状态及不确定项,并基于Backstepping策略设计自适应滑模控制器以保证系统的跟踪误差渐近收敛至零点。同时,虚拟控制信号的导数通过滤波器获得,避免了解析求导,简化了控制器的设计过程。与常规反演滑模控制器及PID控制的对比仿真表明了该自适应控制器的有效性与优越性。