云台式PGK机构设计与仿真
2019-09-02杨新民张刘帅
赵 坤,杨新民,张刘帅
(南京理工大学 瞬态物理国家重点实验室, 南京 210094)
弹道修正弹是指在传统制式弹引信位置换装弹道修正执行机构,使其具备一定的弹道修正能力,提高炮弹及火箭的打击精度。其基本原理是在弹丸发射之前,根据目标坐标等信息预先装定标称弹道信息。在弹丸飞行过程中,根据探测到的飞行弹道与预先装定的标称弹道作比较,计算出弹道偏差,并根据偏差大小控制弹上修正机构进行弹道修正[1-2]。目前,国内外弹道修正执行机构主要有一维弹道修正机构和二维弹道修正机构。其中一维弹道修正机构一般采用增阻型阻力器,对弹丸射程进行向下修正;二维修正机构主要有脉冲发动机直接力修正机构和鸭舵式空气动力修正机构[3-6]。其中鸭舵式空气动力修正机构根据能量来源不同可分为发电机式和电动机式。发电机式是靠鸭舵在气动力下的高速反旋产生电能,通过增大刹车力矩使鸭舵减旋,并在惯性空间下保持不转,该方案一般应用于高速旋转弹丸。电动机式是由电机提供电能,经齿轮组减速,驱动鸭舵旋转,并在惯性空间下保持不转,该方案一般应用于低速旋转弹丸[7]。目前应用于二维弹道修正的PGK(Precision Guidance Kit)精确制导组件是鸭舵式空气动力修正机构。当PGK应用于低速旋转弹丸时,由于电动机转速和齿轮传动比的限制,翼筒的转速将被限制在一定的范围内。当弹体转速超出该范围时,翼筒将无法在惯性空间下保持不转,从而不能产生稳定的法向修正力,失去修正作用。本文主要针对这个问题,在传统低旋PGK的基础上,提出了一种新型的云台式PGK,其实质是拓宽了转速适应范围。
1 PGK修正原理
1.1 传统低旋PGK修正原理
PGK通常有两对空间呈“十”字布局的并与翼筒固联的舵片。图1为某低旋弹丸的PGK三维模型图,其中舵片1与舵片2为同向舵,也称升力舵,选用NACA翼型,用来产生对弹体进行弹道修正的操纵力,舵偏角为δ1。舵片3和舵片4为差动舵,也称反旋舵,用于产生使翼筒反旋的滚转力矩,舵偏角为δ2。当弹丸发射后作高速飞行,在无控阶段,翼筒在气动力作用下相对于弹体反旋,同向舵产生的周期作用力平均值为零,弹道不发生改变。在控制阶段,利用地磁传感器测得弹体转速,同时控制电机驱动翼筒反旋,当翼筒与弹体转速大小相同并在惯性空间下保持不转时,将会对弹体产生稳定的法向修正力。修正机构控制器根据弹上测量元件的反馈信息和弹载计算机生成的修正指令,驱动电机改变同向舵相对于弹体的位置,来改变法向修正力的方向,实现弹道的二维修正[7-10]。
图1 某低旋弹丸的PGK三维模型图
1.2 云台式PGK修正原理
图2为新型云台式PGK的三维模型图,在原有的结构上添加了一个旋转云台,相对于图1中的PGK尺寸变化很小。其修正原理为:根据翼筒转速范围选取转速预设值n,由地磁传感器测得云台转速n1,并将该转速与预设值n作比较,根据比较结果控制云台电机使云台转速始终保持为预设值n。同时控制翼筒电机使翼筒相对弹体或云台反旋,并在惯性空间下保持不转,提供弹道修正所需的法向修正力,此时翼筒转速为n。同向舵相对弹体的位置由霍尔元件测得,通过改变相对位置来改变法向力的方向。该新型的云台式PGK与传统的PGK相比不同点在于:传统的PGK利用地磁测量弹体转速,而云台式PGK利用地磁测量云台转速而非弹体转速;云台式PGK多了一个旋转机构,可适用于转速范围更大的弹丸,包括微旋和无旋弹丸。

图2 云台式PGK三维模型图
1.3 云台式PGK机构设计
某型云台式PGK结构简图如图3,其外露弹体长度为155 mm,深入弹体长度125 mm,质量约1.8 kg。其结构主要包括:卫星接收机模块、测量控制模块、驱动模块、能源及引信模块。其中驱动模块分翼筒驱动模块和云台驱动模块。

图3 云台式PGK结构简图
1.3.1驱动减速装置设计
由于制导组件本身尺寸较小,且结构非常紧凑,本设计采用瑞士MAXON无刷直流电机。电机外形尺寸见图4。

图4 无刷直流电机
电机参数见表1。
该电机实验测得有效转速为2 000~8 000 r/min,内部含有霍尔元件,能够精确的检测出电机的实时转速,并反馈给控制器,以闭环控制电机转速。
某型弹发射后低速旋转,转速约为5~16 r/s。需对电动机的输出转速作减速处理。初步选定翼筒减速机构为直齿圆柱齿轮减速方案。由式(1)计算可得减速比约为7.29。
(1)
选定翼筒减速机构减速比为7,则翼筒转速范围为4.76~19.04 r/s。云台减速机构采用一级行星减速方案,减速比由式(2)解得。
(2)
其中n1为太阳轮转速,n2为行星架转速,n3为外圈(弹丸)转速,a为外圈齿数/太阳轮齿数。因其减速比与外圈转速即弹丸转速有关,取当弹丸转速为0时,云台减速机构减速比为6.6。两齿轮减速机构结构图见图5,其中5(a)为采用两级齿轮减速的翼筒减速机构,图5(b)为采用行星轮减速的云台减速机构。
图5 齿轮减速机构结构
各减速机构设计参数值见表2,其中主动轮与中间轮材料为Ti- 6AL- 4V,翼筒材料为2A12- T4,压力角均为20°。齿轮模数m=0.4。
表2 减速机构设计参数值
1.3.2云台机构设计
云台要相对于弹体旋转,云台机构简图如图6。云台驱动机构包括:接头、压环、大轴承、电机、电机套筒、行星轮、小轴承、齿轮轴、小齿轮(太阳轮)、压片、电池引信舱等零部件。其中电池引信舱通过M52X3标准螺纹与弹丸连接,云台通过角接触轴承与电池引信舱隔转,以承受轴承力,接头与翼筒电机的齿轮工作架通过螺钉连接并与电机套筒通过螺纹连接。

图6 云台机构简图
翼筒驱动机构与云台驱动机构相似,在此不再赘述。
1.4 云台式PGK调控范围
本文设计的云台式PGK目的是为了使PGK可适用于转速范围更大的弹丸,若无云台机构本文中的PGK翼筒转速范围为4.76~19.04 r/s,即云台式PGK可用于转速超出4.76~19.04 r/s时的弹丸的弹道修正。图7为不同弹丸转速下,电机转速所对应的云台转速曲线。顺着飞行方向观察,弹丸、行星架、太阳轮均顺时针转动时,方向为正。此处弹丸转速即为外圈转速,行星架转速即为云台转速。

图7 不同弹丸转速下电机转速对应的云台转速曲线
图7第一象限内,由下向上18条曲线分别为弹丸转速由0 r/s到17 r/s时,不同电机转速所对应的云台转速。二三象限内,由下向上48条曲线分别为弹丸转速由0 r/s到47 r/s时,不同电机转速所对应的云台转速。图中四条平行于X轴的横线对应云台转速为±4.76 r/s和±19.04 r/s。只有当云台转速在从±4.76到±19.04 r/s时,云台式PGK才有弹道修正能力。
由图7第一象限可知:电机转速在34~125.4 r/s时,云台转速对应为从5.15 r/s到19.04 r/s,此时云台PGK具有弹道修正能力。随着弹丸转速的提高,对应曲线介于从4.76 r/s到19.04 r/s的部分在减少,即云台式PGK具有弹道修正能力时的所对应的电机转速范围在减小。当弹丸转速高于16 r/s时,其对应的云台转速皆高于19.04 r/s,说明此时电机正转将使云台式PGK不再具有弹道修正能力。
由图7二三象限可知:当弹丸转速为0 r/s,电机转速在从-125.4到-34 r/s时,对应云台转速为-19.04~-5.15 r/s,此时云台式PGK具有弹道修正能力。当弹丸转速在从2~28 r/s时,对应云台转速部分介于从±4.76 r/s到±19.04 r/s。且具有控制能力的电机转速范围先减小后增大。当弹丸转速在从28到46 r/s时,对应云台转速介于从4.76 r/s到19.04 r/s的部分逐渐减少,当转速高于46 r/s时,对应云台转速完全超高于19.04 r/s,此时PGK不再具有弹道修正能力。
由图7可知:当弹丸转速在0~16 r/s或29 r/s~46 r/s时,通过控制电机正反转及转速可将云台转速调控到19.04 r/s。当弹丸转速在从16 r/s到29 r/s时,控制电机反转及转速可将云台转速调控到5 r/s。因此,在控制云台转速时,可将云台转速预设值设为19.04 r/s和5 r/s。
综上可知,该云台式PGK可适用的弹丸转速为0~46 r/s,相比于之前的4.76 r/s~19.04 r/s,云台式PGK不仅可以用于更高转速的弹丸,还可以用于更低转速的弹丸,甚至是无旋弹。弹丸反旋的情况与此类似,在此不再赘述。
2 云台式PGK结构仿真
该型云台式PGK可应用于低速旋转的尾翼火箭弹,其发射过载低于100 g。为保证PGK在发射瞬间不会被破坏,需对其关键零部件在极限条件下的结构强度进行校核。电池引信舱在发射瞬间要承受自身过载以及整个PGK的压力。图8为电池引信舱材料为铝2A12- T4时的有限元仿真结果。由图8(a)、8(b)可知:在发射瞬间电池引信舱受到的极限应力约为31.99 MPa,小于材料的屈服极限393.7 MPa(20 ℃)。发射瞬间极限应变为1.038 μm,最大应力应变发生在电池引信舱固定轴承外圈处。
图8 电池引信舱应力应变云图
图9为齿轮工作架在发射瞬间的应力应变云图,材料为铝2A12-T4。由图9可知:发射瞬间齿轮工作架最大极限应力为176.25 MPa,最大极限应变为62 μm。
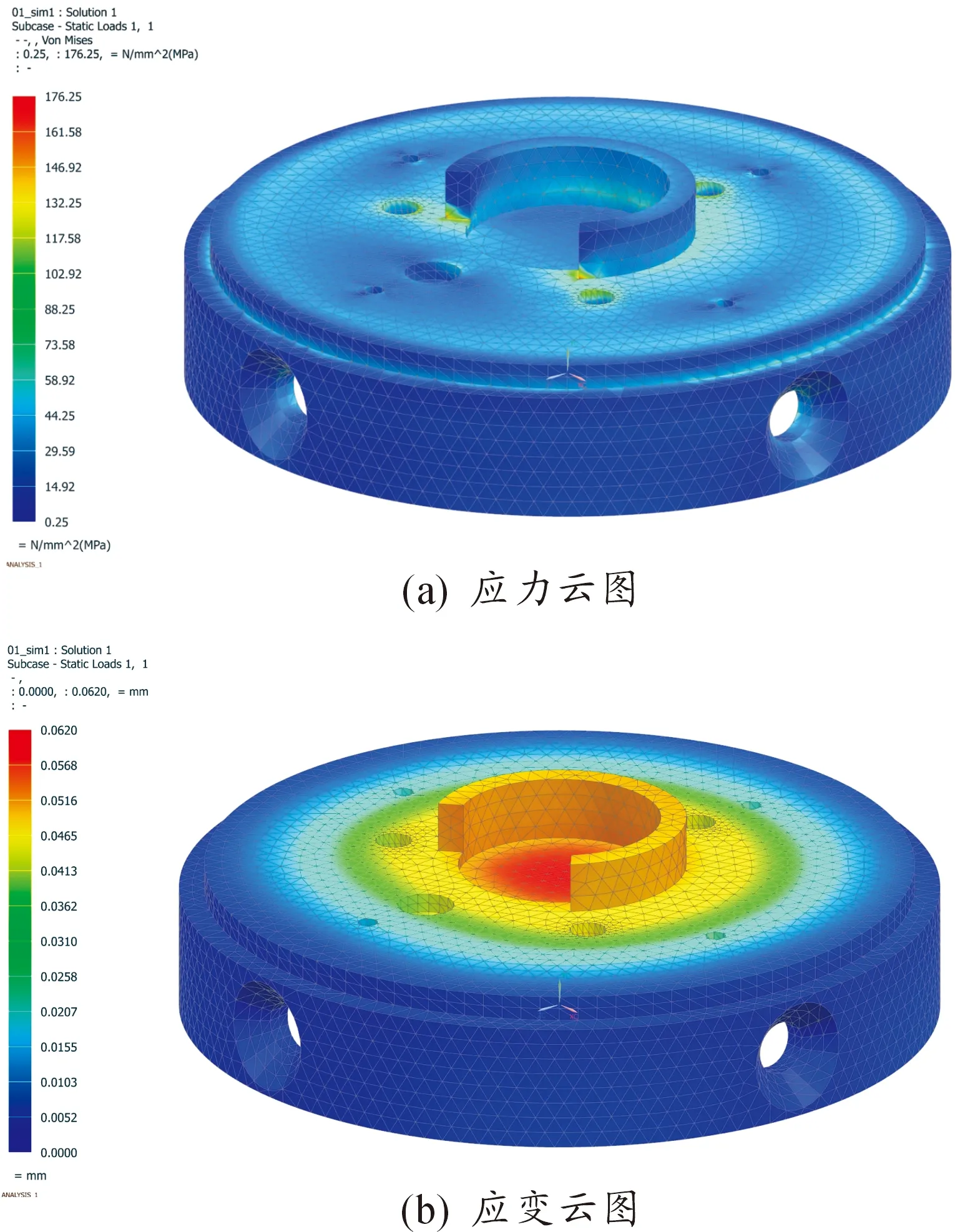
图9 齿轮工作架应力应变云图
图10为在主动轮上施加0.03 N·m的扭矩,140 r/s的转速,减速机构应力应变云图。由图10(a)、图10(b)可知翼筒减速齿轮工作时最大接触应力13.98 MPa,最大接触应变为0.113 μm;由图10(c)、图10(d)可知云台减速齿轮工作时最大接触应力为4.555 MPa,最大接触应变为0.039 μm,且最大接触应力皆出现在相啮合的小齿轮齿根处,均远小于Ti- 6Al- 4v材料的屈服极限805 MPa。
由上可知,该新型云台式PGK运用到火箭弹上时,在发射瞬间各关键零部件极限应变均小于0.1mm,极限应力均小于材料的屈服极限,零件可靠。

图10 减速机构应力应变云图
3 结论
云台式PGK通过在传统PGK的基础上增设一个旋转机构,可使PGK适用于转速范围更大的弹丸。通过调节云台减速机构传动比,可根据需求对转速范围进行适当的调节。计算结果表明:当原PGK适用的弹体转速为4.76~19.04 r/s,云台减速比为6.6(n3=0)时,云台式PGK适用的弹体转速范围为0~46 r/s。当云台式PGK应用于低过载的火箭弹时,关键零部件的强度可靠。
