非制导炸弹投掷的攻击航迹规划研究
2019-08-30魏燕明王倩张建祥黄海清毛厚晨甘旭升
魏燕明,王倩,张建祥,黄海清,毛厚晨,甘旭升
(1.西京学院 理学院,西安 710123)(2.空军工程大学 空管领航学院,西安 710051)
0 引 言
现代战争中,制导炸弹已被广泛使用,但非制导炸弹,在未来战场上仍会保留自己一席之地。尤其对于我国来说,制导炸弹尚未大量装备部队,非制导炸弹在未来相当长时间内仍会继续使用。为提升作战效能,战斗机携带非制导炸弹遂行对地攻击,需要预先了解实战背景下武器装备的运用情况,并根据战术选择,对战斗机航迹进行精确规划。
航迹规划按照类型区分主要有轨迹规划和路径规划[1]。其中,轨迹规划主要是采用控制论的方法对目标函数进行优化[2-3]。主要有最优控制法、最速下降法和非线性规划方法等。路径规划是在指定空间内通过确定型或随机型的空间搜索算法搜索可行航迹,生成的航迹是几何图形,通常不考虑航空器的动力学约束。规划算法主要有A*、D*算法、动态规划以及GA、ACO、PSO等智能算法。以上算法都有各自的优点,但都有一个共同的缺点,不能综合考虑战术背景和战术规则。虽然在算法中的各类模型可以对飞行器的过载、转弯半径、速度、加速度等参数进行设置,但是对于有人机,不带战术背景和战术规则的飞行是不符合实际的。战斗机执行攻击任务,需要进行一系列的机动飞行,以任务和武器运用为约束,因而在为战斗机规划航迹时,需要考虑飞机的战术特征和武器运用约束,以使飞行航迹符合作战要求。国内学者通常采用伪谱法[4-5]来规划战斗机对地攻击的航迹,主要作法是将航迹规划问题转化为离散参数优化问题进行求解,取得了一定的成果,但是,当航迹精度要求较高时,必须增加离散点数量,从而影响初值的设置以及算法的性能。国外研究者在建立航迹模型时,主要按照航空器飞行特点和飞行状态将连续复杂的机动动作划分为不同的飞行阶段,然后根据一定的方法将各阶段进行衔接,组合成完整航迹。2005年,E.Frazzoli等[6]将连续的航迹划分为多个基本机动动作,并在不同机动动作之间给定配平阶段,然后将动作连接,实现对机动动作的控制和飞行航迹的规划。2012年,D.Mellinger等[7]将一个连续的飞行动作按照飞行的不同阶段进行划分,通过对不同阶段航空器运动参数的控制完成航迹规划。
以往分段组合思想只是用在航空器抽象的航迹规划问题中,不涉及具体的战术背景、战术规则以及武器投射的复杂情况,本文吸取以上教训和经验,将分段组合思想引入到战斗机的攻击航迹规划的研究中对航段进行组合,以实现非制导炸弹的精准投掷,更具实际意义和实用价值。
1 战斗机攻击航迹规划基本问题
1.1 航迹规划相关知识
1.1.1 航迹规划基本原则
在进攻作战中,战斗机携带非制导炸弹遂行对地攻击的攻击航线与战斗机突防手段和机动方式有关。根据文献[8]可知战斗机选择攻击航线需要考虑以下四个主要原则:一是尽量避开敌防空武器覆盖范围,或者沿着敌被压制地带飞行;二是尽量快速飞越敌方上空,减少停留时间;三是借助地形地势或者气象条件的掩护,隐蔽进入;四是利用战术机动进行迷惑或快速躲避。
1.1.2 航迹规划影响因素
影响飞机航迹规划的因素很多,包括地形、威胁、气象等,本文主要考虑武器装备的运用对航迹产生的影响,主要体现在飞机的攻击战术选择上。根据攻击方式不同,战斗机对地攻击战术选择主要包括以下三种:俯冲攻击、水平攻击、上仰抛投[9]。
不同的机型根据自身性能和任务性质对攻击战术有不同的选择,不同的攻击战术对航迹需求不同。水平攻击常用于轰炸机在高高度上对大面积目标进行轰炸,机动性较差,航线通常以高高度为主;上仰抛投常用于轰炸机或战斗机携带核弹对目标进行抛射攻击,便于脱离,但精度较差,航线可以在中空和低空,在上升的过程中抛投武器。俯冲攻击则可以结合多种战术动作,灵活性较强,炸弹投出的初速快,侵彻力大,是空袭作战的主要攻击战术,航线可以从低空、中空、高空开始,以俯冲投弹结束。本文只对俯冲攻击航迹进行研究。
1.2 坐标系建立与转换关系
要确定战斗机和炸弹的飞行姿态和运动轨迹,首先要建立合适的坐标轴系[10]。根据需要建立(1)惯性坐标系OxIyIzI(地球表面某点为原点O);(2)机体坐标系OxByBzB(机体质心为原点O);(3)气流坐标系OxAyAzA(机体质心为原点O);(4)航迹坐标系OxKyKzK(机体质心为原点O),如图1所示。
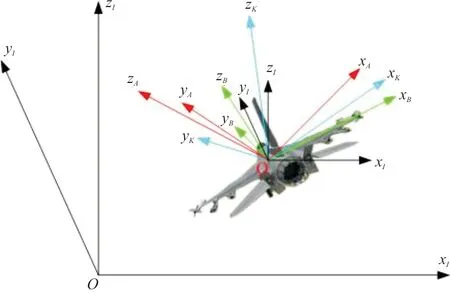
图1 坐标系示意图Fig.1 Coordinate system diagram
从图1可以看出:惯性轴系与航迹轴系对应轴之间的夹角为航迹角,两者y轴在水平面上的夹角为航迹方位角χ,垂直方向上的夹角为航迹倾角θ;惯性轴系与机体轴系对应轴之间的夹角为飞行姿态角,两者y轴在垂直面内的夹角为俯仰角ϑ,y轴与水平面的夹角为航向角φ,x轴与垂直面的夹角为滚转角γ;机体系与气流系y轴的夹角为迎角α,机体系与航迹系y轴的夹角为侧滑角β。
为方便计算,在计算过程中需要将参数矢量统一到一个坐标系中,这就需要对坐标系进行转换[10-11]。结合前文所建坐标系并根据论文需要,得出以下坐标系转换矩阵。
(1)惯性系OxIyIzI和机体系OxByBzB转换
(1)
(2)惯性系OxIyIzI与航迹系OxKyKzK转换
(2)
1.3 飞机运动模型
战术动作的生成是基于战斗机机动动作模型,因此首先要建立战斗机的运动模型。本文将战斗机视为一个可操纵的质点,不考虑飞机飞行过程中产生的侧滑影响[12-13],建立如下战机的运动模型。结合前文坐标系,在惯性系下,战斗机的质点运动学方程为:
(3)
航迹系下的质点动力学微分方程为:
(4)
式中:T为飞机推力;α为飞机迎角;D为飞机所受空气阻力;θ为飞机航迹倾角;L为飞机所受升力;M为飞机空重;v为速度;φ为航向角;γ为滚转角(坡度);nf为法向过载;x,y,z为飞机质点坐标。
根据上式可知,战斗机在飞行中受到空气动力的作用,需要在气流坐标系中建立如下空气动力模型[14]:
(5)
式中:S为机翼面积;ρ为空气密度;CD为空气阻力系数;CL为空气升力系数。
2 俯冲攻击战术运用方式
2.1 俯冲攻击航线
俯冲攻击通过不同的战术动作组合,有多种类型,最主要的是跃升机动加俯冲攻击[9]。跃升机动加俯冲战术是为了避免地面防空武器威胁而要求战斗机从低空进入实施攻击。正确实施跃升机动加俯冲攻击战术可以让战机以最佳状态来应对防空导弹威胁,此外,还可以提高攻击的突然性和隐蔽性,提高进攻作战的生存率。跃升机动加俯冲同样有诸多变型,分为直接跃升机动加俯冲,进入角小于15°;偏角跃升机动加俯冲,进入角大于15°;间接跃升机动加俯冲,飞机从起始点直接飞向跃升点实施的偏角跃升机动加俯冲。具体如图2所示。

图2 跃升机动加俯冲定义Fig.2 Definition of jump-dive maneuver
2.2 炸弹投放模型
非制导炸弹对航迹的影响主要体现在炸弹的投掷参数上,比如炸弹的投掷距离和高度等,这就需要对炸弹运动情况进行分析。炸弹在空气中运动会受多种因素影响,为了便于计算,将炸弹看成是一种空间刚体,在飞行过程中不发生形变,只受自身重力和空气阻力影响,阻力与弹体轴线方向近似一致,因此将炸弹的运动可以近似认为是质心运动,即把炸弹当做质点。建立炸弹运动坐标轴系,以投弹点为坐标原点,初始速度的水平方向为Ox轴,下落方向为Oy轴[15]。炸弹运动示意图如图3所示。
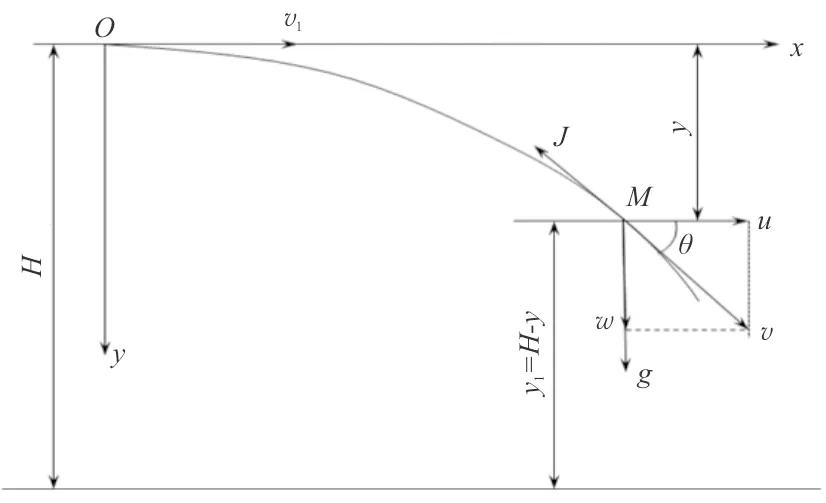
图3 炸弹运动示意图Fig.3 Bomb movement diagram
对炸弹进行受力分析,受竖直向下的重力和沿速度相反方向的空气阻力影响,存在重力加速度g和阻力加速度J。
那么,炸弹质心运动的向量方程如下:
(6)
阻力加速度函数为:
J=C·Hτ(y)G(vτ,aON)·v
(7)
对阻力加速度求导可以推导出炸弹微分方程如下:
(8)
其中,弹道系数C计算公式:
(9)
空气阻力函数:
(10)
空气比重函数:
(11)
将上述计算公式带入方程中可得化简后运动方程如下:
(12)

3 航迹控制算法
3.1 战术动作模型库
战斗机战术动作多样,任务不同,所需动作类型也不同,根据前述的俯冲攻击航线基本要求,结合F-16俯冲攻击战术特点[16-18],建立如下战术动作模型库。
(1)平飞。主要用于巡航、截击、退出以及战术动作之间转换的过渡阶段。
平飞是飞机各种姿态角保持0的状态,并按水平直线航迹进行加减速或匀速的飞行过程。在平飞过程中,θ=0,γ=0,只控制飞机速度大小,如果从其他动作转换到平飞状态,需要将滚转角和航迹倾角调整为0。
(2)水平转弯。主要用于战斗机空中格斗或者对敌方导弹和战机进行躲避时改变航向。水平转弯机动主要考虑法向过载和滚转角,进入转弯的条件为飞机滚转到规定滚转角γ,保持速度和滚转角不变,航迹倾角始终保持0;退出转弯条件以转弯时间或转过的角度决定,达到规定条件后将飞机改平。
(3)跃升。用于迅速改变战机高度,在空战中,当我机高度低于敌方,需要迅速拉起以接敌;在对地攻击中,从低空超低空进入后,迅速跃升到一定高度后再瞄准攻击。进入条件为:当开始跃升时,起始点的航迹倾角θ不等于所需要的跃升角,此时增加法向过载以增大航迹倾角直至达到规定的跃升角;退出条件通常以是否达到规定的爬升时间和爬升高度来决定,退出动作与进入跃升相反。
(4)俯冲。俯冲是飞机为快速下降高度或实施攻击时所采取的动作,与跃升过程相反。俯冲通常紧接退出跃升动作,此时飞机已经改平,所以需要加大法向过载使机头向下,直至达到俯冲角;退出俯冲的条件主要为是否达到规定的俯冲高度或俯冲时间或者是否完成投弹。
3.2 机动控制模型
本文选择切向和法向过载以及滚转角作为机动控制变量,改变速度、俯仰和航向等参数。通过改变控制量来改变飞机的运动参数和运动状态,对于运动参数改变量较大的情况,现代战斗机具有良好的机动性,以过载为例,战斗机可以在瞬时达到极限过载,也可以瞬时卸载,因此可以采用开环控制方式,按照实际飞行经验对控制量进行大幅度改变。对于运动参数改变量较小的情况,为了保证动作的稳定而采用闭环控制方式,对动作进行精确控制[10,14]。
开环控制中控制量通常使用常数或者以定常速率变化,开环控制算法为:
(13)

闭环控制则需要考虑飞行员操作特点与习惯。通常情况下,飞行员通过飞机当前运动参数和要求运动参数的差值来决定控制量变化大小,属于积分控制过程。同时,飞行员操纵量与差值的大小和变化率相对应,当差值增大或减小,控制量也随之增大或减小,属于比例和微分控制。因此,可以采用PID控制来模拟闭环控制,传递函数为:
(14)
式中:U(S)为控制量的拉氏变换;X′(S)为参数误差的拉氏变换,k1,k2,k3由飞行员飞行经验给定,可以根据需要调整。
飞机在做每个战术动作时,可以根据飞机所处状态不同将完整动作划分为不同阶段,在每个阶段都有不同的控制目标,本文根据飞机飞行特点以及各阶段控制目标,基于前后状态变化建立开环、闭环控制算法。
①平飞
首先是要调整飞行速度到要求的平飞速度,按照速度差对切向过载进行控制。
切向过载:
nx=(vrequire-v)(g·t)
(15)
其次调整飞机姿态角。
滚转角:
(16)
航迹倾角:若θ过大,采用开环控制,当θ较小时,则采用闭环控制。
法向过载:
(17)
最后,在稳定平飞阶段。
控制参数为:ny=1,γ=0,θ=0
②水平转弯分三个过程
进入转弯:飞机从平飞状态开始建立坡度到指定转弯坡度的过程。
参数控制模型为:
(18)
恒定转弯:以恒定转弯坡度和速度实施转弯的过程。
参数控制模型为:
γt=γrequire
(19)
退出转弯:转弯达到指定角度后开始减小坡度直至平飞状态的过程。
控制模型为:
(20)
在转弯过程中,控制参数设定为:ny=1/cosγ,nx=sinθ
③跃升机动分四个阶段
进入跃升:从平飞状态增加法向过载,拉起机头到指定仰角,坡度保持不变。
参数控制模型为:
(21)
直线爬升:保持倾角和滚转角不变,通常加速爬升。
参数控制模型为:
ny=cosθ,nx=sinθ
(22)
横滚倒转:由于跃升过程中飞机仰角较大,在退出跃升前需要横滚180°,将机体倒转以快速减小仰角,退出跃升。
参数控制模型为:
(23)
退出跃升:完成横滚后开始增加过载到退出段,使倾角减小。
参数控制模型为:
(24)
④俯冲主要分三个阶段
拉下阶段:紧接退出跃升动作,改变倒转的坡度,并下压倾角,做转弯下降动作,与斜筋斗动作后半段相似。
参数控制模型为:
(25)
俯冲阶段:以恒定滚转角,保持俯角不变进行加速俯冲。
参数控制模型为:
(26)
改出阶段:俯冲结束意味着完成投弹,需要改出俯冲退出攻击,以水平改出为例,与跃升拉起阶段相似。
参数控制模型为:
(27)
3.3 参数约束
除上述控制量的控制过程外,整个俯冲攻击过程飞机运动参数受飞机性能和其他要求限定,主要有以下约束条件。
①初值约束,主要为每个战术动作起始时刻的运动参数限制。
②终端约束,主要为每个战术动作结束时刻的运动参数限制。
③过程约束,主要是在每个动作执行过程中机动变量的取值范围。
4 实例仿真及分析
4.1 参数设定
本文假设某型战斗机(可参考F-16)携带某型非制导航空炸弹(参考美军MK-80系列炸弹)对某固定目标实施跃升机动加俯冲攻击,基本参数设定如下。
飞机参数:飞机初始飞行速度900 km/h,最大速度不超过1.5 Ma,机翼面积27.87 m2,起飞质量19 000 kg,单发加力推力144.6 kN,飞行速度最大为2 175 km/h,滚转速度270°/s,最大转弯速率26°/s,限制过载-3 g~+9 g。
炸弹参数:弹径0.299 m,弹长2.11 m,炸弹质量216.5 kg。
环境参数:空气阻力系数Cx0=0.160,温度梯度G=5.862×10-3度/m,气体常数R=29.27 m/°,标准气象条件下温度τon=15度,气压hon=760 mmHg。
控制算法参数:根据实地调研了解飞行员基本飞行情况,水平飞行法向过载为1,无加减速下,切向过载为0,转弯过程最大过载不大于5 g,保持5 g以上过载时间不多于10 s,8 g以上过载不多于3 s,瞬时过载变化率不超过2 g/s;切向过载不超过正负5 g,瞬时变化率不超过1 g/s。
4.2 仿真分析
根据设定参数,采用Runge-Kutta法对2.2节炸弹投放模型进行解算,在MATLAB 2013a环境中仿真,投弹速度400 m/s,可得在不同高度与不同角度下的弹道,如图4所示。
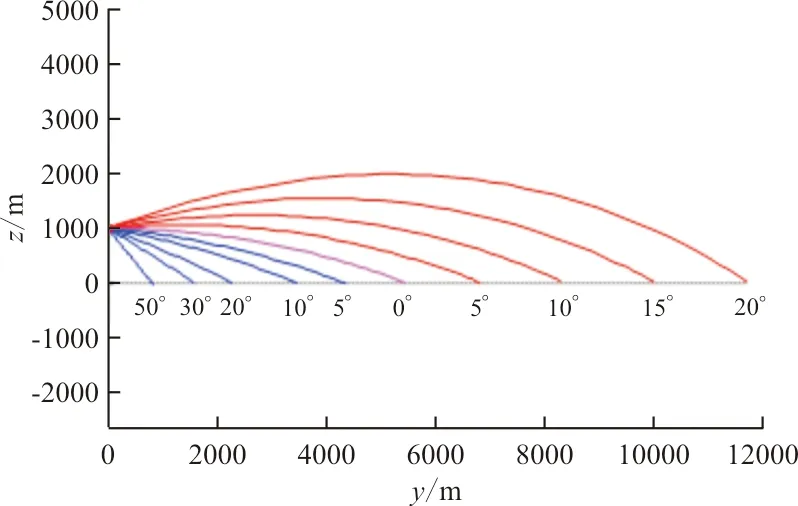
(a)俯冲弹道1 000 m高度不同角度
(b)三维弹道20°俯角不同高度图4 Runge-Kutta法解算的弹道Fig.4 Ballistic trajectory obtained by Runge-Kutta method
炸弹的投掷高度和角度会影响飞机最后俯冲段的控制参数。飞机在完成俯冲准备即改出坡度后,航向需要对正目标,假设改出点二维坐标为(xgc,ygc),航向为φgc,均可从仿真过程中获取,已知目标点二维坐标为(xT,yT),那么,需要满足:
φgc=π-arc tan[(yT-ygc)/(xT-xgc)]
(28)
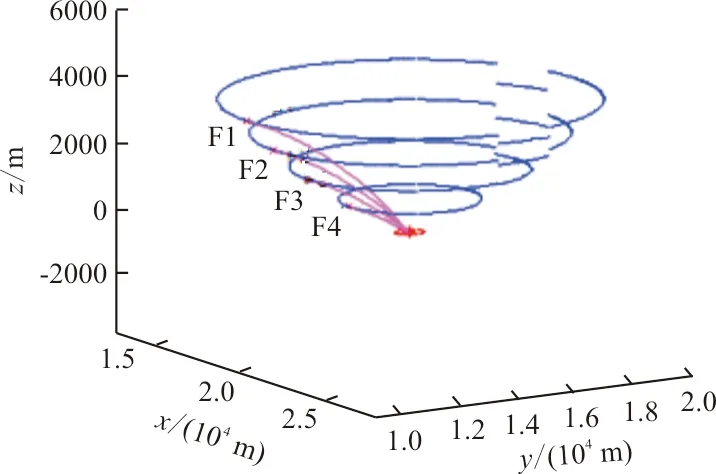
假设航迹起始点坐标(20 000,0,0)攻击初始进入高度100 m,跃升高度不超过5 000 m,在1 000 m高度以20°俯角投掷炸弹,炸弹初速400 m/s,目标点坐标(20 000,15 000,0)。飞机跃升到一定高度后,向下俯冲,为了达到要求的投掷条件,很难以固定参数完成俯冲,需要在俯冲过程中不断调整航迹倾角。采用Runge-Kutta法对前述的飞机运动模型进行解算,结合第3节控制算法,可得战斗机跃升加俯冲攻击航迹,如图5所示。
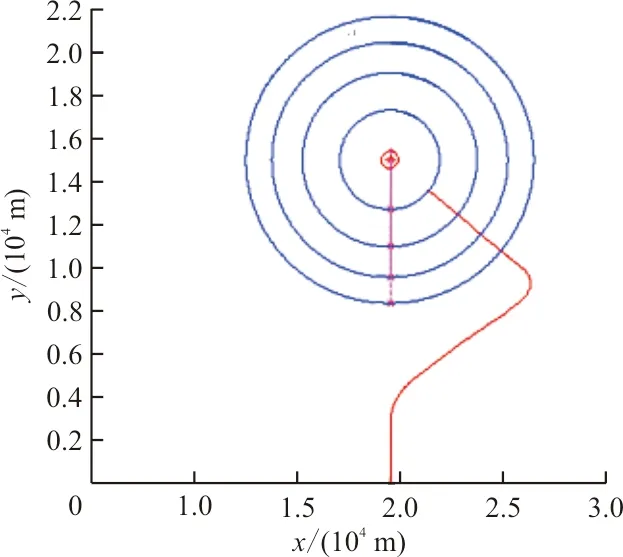
(a)三维航迹俯视图

(b)三维视图图5 战斗机跃升加俯冲攻击航迹Fig.5 Path of jump-dive attack for fighter
从图5可以看出:针对俯冲攻击战术所需机动动作进行建模,并根据飞行员飞行经验设置机动控制算法和控制参数,所规划航迹符合攻击航迹基本要求,并且能够保证按照规定参数投掷炸弹。
同时根据初始参数设置和控制算法解算,可得战斗机在飞行过程中各控制量以及各性能参数的变化情况,如图6所示。
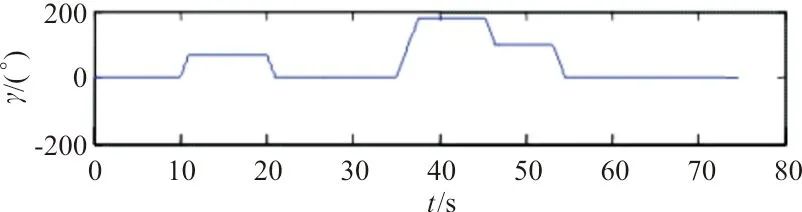
(a1)滚转角变化
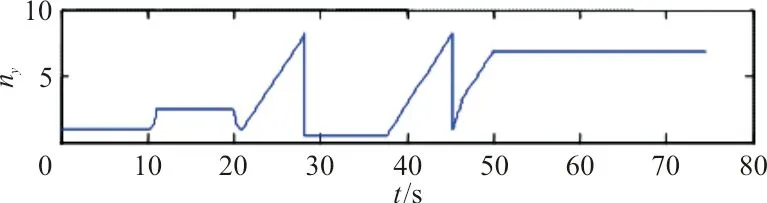
(a2)法向过载变化
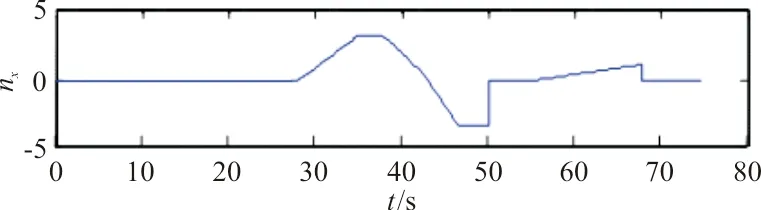
(a3)切向过载变化(a)控制量变化

(b1)速度变化
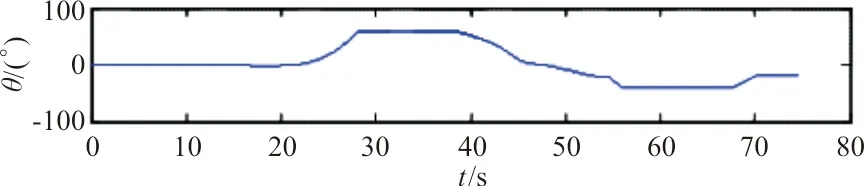
(b2)航迹倾角度变化
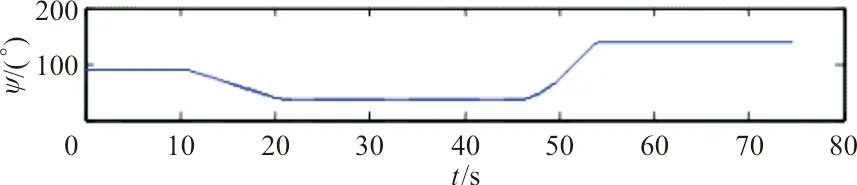
(b3)航向角变化
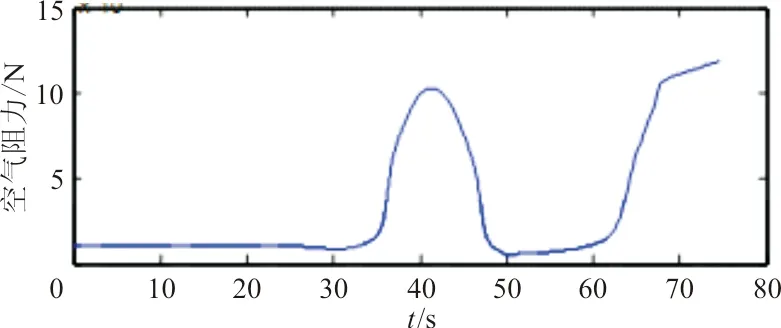
(b4)空元阻力变化

(b5)推力变化(b)性能参数变化图6 战斗机的控制量以及性能参数变化Fig.6 Changes of control variables and performance parameters for fighter
从图6(a)可以看出:控制参数基本符合机动动作过程中的要求,尤其是在动作转换之间的控制量值,符合设定值。从图6(b)可以看出:飞行参数变化基本反映了飞行的过程,也满足飞机性能参数的约束条件。因此,通过对战斗机机动动作建模,按照攻击任务和攻击战术要求将各战术动作进行组合衔接,根据动作各阶段控制参数要求对机动动作进行精确控制,所规划航迹在机动动作的控制与衔接、战术的完成度上满足日常作战飞行要求。
4.3 演示验证
为验证本文方法的有效性,将规划出的F-16航迹加载到某战术飞行模拟验证系统中进行可视化仿真验证,综合演示的部分动画图例如图7所示。

(a)修正参数

(b)俯冲攻击

(c)炸弹投掷

(d)命中目标图7 F-16跃升加俯冲攻击的演示图例Fig.7 Demonstration of F-16 jump-dive attack
从图7可以看出:与传统方法仅考虑航空器自身参数而无法处理战术背景的航迹规划相比,本文方法在规划战斗机航迹时,既考虑到战斗机跃升机动加俯冲攻击连续复杂机动动作的战术特征,又考虑到非制式导炸弹投放的约束条件,能够解决传统航迹规划无法解决的问题,也为改造传统航迹规划方法提供了一条新的思路。规划出来的航迹满足非制导炸弹的物理限制和俯冲攻击的技战术要求,达到了研究的预期目的。
5 结 论
(1)所提出方法规划的航迹符合非制导炸弹的投掷条件,能够保证按照规定参数投掷炸弹,从而验证了方法是可行的与有效的。
(2)当前对于战斗机的攻击航迹规划尚缺少科学、合理的规划方法,而本文研究能够为战斗机的非制导武器攻击的航迹规划提供一定理论依据。
(3)在研究中并未考虑实际的地形和防空威胁,且只模拟了单机飞行,下步将对多机展开研究并应充分考虑实际战场环境。
