基于Arduino单片机的太阳能智能充电控制器监测系统设计
2019-08-29
(吉林大学 应用技术学院,长春 130022)
0 引言
Arduino是一款灵动性较强的电子原型平台,包含所有型号的Arduino板硬件设备和Arduino IDE操作软件,具备极高的实用适应能力。这种单片机平台组织的开放原始码以simple I/O介面版语言作为编写依据,且融合C语言、Java、Processing/Wiring等多种编程代码作为新条件语句的生成环境。最基本的Arduino单片机包含软、硬件组织两种组成成分,其中硬件部分可以简单概括为用作连接电路的Arduino电路板结构,而软件部分则是具备更改操作能力的Arduino IDE代码[1-2]。当系统计算机在IDE组织中编写程序代码时,输出设备会将这些信息直接传输至Arduino电路板,并以此达到执行系统语句指令的目的。
近年来太阳能智能充电控制器在多项工业领域中都出现迅猛发展的势头,但随着器件设备运行时间的不断增加,连接稳固性下降、控制通路无序等问题,都对控制元件自身的应用执行能力造成严重负面影响。为解决上述问题,搭建一种基于Arduino单片机的太阳能智能充电控制器监测系统,按照软硬件平台搭建、控制器监测方案选型、实用误差标定的操作流程,将相关系统执行参数调试至最佳应用状态。
1 充电控制器监测系统的结构组织
在总体硬件结构的基础上,连结Arduino单片机模块,并对监测协议进行有效移植,实现节点的定向传输,完成充电控制器监测系统的结构组织搭建。
1.1 系统参数与硬件总体结构
太阳能智能充电控制器监测系统设计参数:采用atmega8515l-8muavr单片机,40S68S37N03芯片,CC2530F64兼容设备,772100 PNOZ m B0基础继电器,ARM8227嵌入式主板ARM9处理器,MC34063API 34063AP1 DIP8/DC-DC/转换器设备。
太阳能智能充电控制器监测系统的硬件总体结构包含感知数据采集、控制传输、监测数据分析3个组成环节。其中,感知数据采集单元由Arduino单片机模块、CC2530设备和基础继电器组成,在执行充电数据选择、控制连接、监测对照功能的基础上,实现充电控制器的监测数据采集。系统硬件总体结构如图1所示。

图1 系统硬件总体结构图
Arduino单片机的功能是促进太阳能智能充电控制器监测程序的迅速执行,并以此达到巩固系统连接稳定能力的目的[3-4]。控制传输单元在太阳能智能充电控制器监测系统中起到承上启下的作用,在IEEE802.15数据传输模块与ARM处理器的促进下,连结太阳能以太接口,并整合器件电路与系统电源,在符合控制调试接口传输要求的前提下,供应系统控制监测数据的快速传输。监测数据分析单元在CC2530设备的基础上,利用DC-DC控制器截取充电控制器监测数据的模式运行条件,并将其传输至太阳能充电板中进行深入分析研究。
1.2 Arduino单片机模块集成
单片机控制器在外接自主计算机组织的同时,可以接受7~12 V的直流输入电压。在模块单独运行的过程中,充电控制数据保持数字输入状态,且可对器件电路提供5 V和3.3 V两种备选输出电压条件。
Arduino单片机模块采用BST-V51的智能集成底板,在太阳能充电线路处于闭合状态的前提下,调整控制器电机转速,使系统驱动能力在短时间内达到顶峰状态,并以此迫使未经完全利用的太阳能电子快速流入器件控制电路,达到减少无功监测消耗的目的。
1.3 太阳能智能监测协议移植
太阳能智能监测协议是Light Weight IP协议与lwipopts协议的组合形式,既定义了固有的IP轻量级连接条件,也可在精简控制条件下,更改充电控制器监测源代码的开放性强度。Light Weight IP协议可单独移植充电控制器在监测系统中的智能内核,并且只能在监测程序保持自定义开发状态的前提下,才能对控制器装置起到太阳能充电调节作用。lwipopts协议是一种存在于宏观状态下的太阳能充电调节指令,可以根据监测系统智能内核的连接情况,选择控制器装置所需的初始化条件[5-6]。根据上文可知,Arduino单片机是监测系统硬件运行环节中的主要执行设备,且BST-V51集成底板中的太阳能充电线路具备一定的电子输出能力。太阳能智能监测协议作为监测系统中具有实体形态的软件结构,可以通过编写两类分组小协议头结点的方式,建立宏观模式下的临界代码框架,再借助特定的子网掩码,实现从基础系统执行记录数据到完整监测指令的协议移植操作。具体太阳能智能监测协议移植操作流程如图2所示。

图2 太阳能智能监测协议移植流程图
1.4 充电控制器的监测节点传输
充电控制器监测节点始终按照IEEE802.15.4规则排列,且直接受到太阳能智能监测协议的干扰影响。在充电控制器监测节点的传输过程中,Arduino单片机首先根据太阳能智能监测协议的移植程度,来判断临界代码框架的完整情况。再在满足系统监测要求的情况下,排查可供选择智能控制器执行数据的解析结果。若排查结果为通过,则太阳能智能控制器数据自发进入充电监测节点中,并跟随系统的运行速度,完成整体的监测循环流程;若排查结果为未通过,则智能控制器数据再需要经历太阳能监测协议的解析处理,直至排查结果为通过,方可自发进入充电监测节点中,完成系统的监测循环操作。在整个监测节点的传输过程中,智能控制器数据始终遵循Coord伪代码编写原理,且在接入监测申请后的节点覆盖情况由局部状态直接转化为全网覆盖状态,在不改变系统运行监测初衷的前提下,可根据如下所示程序语言完成监测节点传输的伪代码编译处理。
void main (void);
{
Protocol stack initialisation;
Global Enable Interrupy(); //临界代码框架生成
aplJoinNetwork(); //智能控制器执行数据解析
APS DSTMODE SHORT;
If 'YES';
apl SendMSCi; //充电控制器监测节点定向传输
If 'NO';
aplJoinNetwork();
Until 'YES';
apl SendMSCi;
Return;
}
2 智能充电控制器监测方案选型
利用充电控制器监测系统软硬件平台结构,循迹太阳能控制器的监测流程,并对其中的重要处理节点进行避障处理,完成智能充电控制器监测方案的选型操作处理。
2.1 太阳能控制器循迹
太阳能控制器循迹分为内监测走线、外监测走线、环形走线3种选型方向,由其中两种或两种以上循迹方式结合,又额外获得4种选型方向,故基于Arduino单片机的太阳能智能充电控制器监测系统共包含7种循迹选型方式。
1)内监测走线型太阳能控制器循迹:配置两个减速电机作为辅助太阳能智能充电控制器的辅助监测设备,所有连接走线均采用杜邦线。这种控制器循迹方式从系统内部直接连接了Arduino单片机与监测控制器,既节省了架构搭建费用,也提升了系统监测精准性,但整体后期循迹避障处理过程的运算量相对较大,不利于系统的综合误差标定处理。
2)外监测走线型太阳能控制器循迹:配置一个SMARTDUINO装置并外接一个电机固定件,用以获取太阳能智能充电控制器的实际监测消耗情况,所有连接走线均采用Web数据线。这种控制器循迹方式完全暴露于监测系统外部,且整个操作过程中,太阳能充电控制器的实时消耗情况始终保持明朗状态,具备最大化系统监测精度的应用能力[7]。
3)环形走线型太阳能控制器循迹:仅配置一个平台共享装置,位于监测系统内部的走线采用杜邦线、位于监测系统外部的走线采用Web数据线[8]。这种循迹方式的监测精准性相对受限,但总体消耗费用极地,应用范围也不受系统监测运行周期的丝毫影响。
4)内监测走线+外监测走线型太阳能控制器循迹:这种循迹方式既具备较好的监测精准性,又不需经历复杂的误差数据处理过程。
5)内监测走线+环形走线型太阳能控制器循迹:免去了监测系统内部走线对太阳能智能充电控制器实时消耗数据获取的限制,且使系统的监测精确度得到了最大化提升。
6)外监测走线+环形走线型太阳能控制器循迹:可同时获取监测系统内、外部太阳能智能充电控制器的实时消耗数据,且可将系统的监测精确度长时间保持在最佳状态。
7)内监测走线+外监测走线+环形走线型太阳能控制器循迹:融合3种循迹方式的所有优点。
2.2 监测避障处理

(1)
其中,w1、w2、w3分别代表内、外、环3种走线循迹方式监测避障指标,f′代表杜邦线中太阳能充电电子的平均传输速率,y1、y2分别代表两个减速电机的辅助监测参量,|e|代表SMARTDUINO装置的智能充电系数,ut代表最长充电时间条件下Web监测数据线的消耗常量,p代表太阳能充电控制器的实时消耗状态参量,k代表环形循迹方式的物理监测周期。
复合型太阳能控制器循迹方式不具备明确的计算公式,只是在公式(1)的基础上,通过分布加工w1、w2、w3三类监测避障指标的方式,得到全新的复合型避障处理规则,其具体运算原理如公式(2)所示:
(2)
上式中,w4、w5、w6、w7分别代表内监测走线+外监测走线型太阳能控制器循迹的避障指标、内监测走线+环形走线型太阳能控制器循迹的避障指标、外监测走线+环形走线型太阳能控制器循迹的避障指标、内监测走线+外监测走线+环形走线型太阳能控制器循迹的避障指标,i、l、j分别代表与内、外、环3种走线循迹方式监测避障指标相关的监测利用系数。
3 系统误差标定
在太阳能智能充电控制器监测系统运行过程中,产生误差的因素来自多个方面。特别是在控制器设备循迹等多个执行处理流程中,往往不仅要考虑到多种应用线路器件间的结合适配性,还要通过多种技术手段,使系统的监测精准程度不断向预期标准数值靠近[9-10]。简单来说,误差标定就是在保持系统运行设备主观能动性完整的前提下,利用数据逼近的处理手段,使与监测精准度相关的可变偏差结果逐渐缩小,直至最终结果满足人为可接受物理范围需求。
控制器数据采集误差、监测目标选取误差、运行环境误差是三类主要系统误差条件。控制器数据采集误差多发生于监测系统软、硬件设备原件的安装过程,受到Arduino单片机充电干扰条件χ的直接影响,取D作为控制器数据采集上限条件,可将该项采集误差结果表示为:
(3)
其中,d代表控制器数据的随机采集向量,λ代表Arduino单片机的智能化干扰频率,s代表太阳能控制器所承受的平均监测干扰数据量。
监测目标选取误差标定以避障处理原则选取作为执行依据,在默认基于Arduino单片机太阳能智能充电控制器监测系统采用内走线循迹方式的前提下,可将该项误差采集结果表示为:
(4)
δ代表与内走线循迹方式相关的选取系数,s代表与监测目标选取相关的被积向量,F(w1)代表监测系统默认定义的、与内走线循迹相关的目标函数,∂F(w1)代表该函数定义式的定积分表达式。
运行环境误差是与太阳能充电控制器监测系统执行结果最相关的物理系数条件。设ξ1、ξ2代表两个不同的监测系统默认控制器充电偏移向量,F3代表该项误差采集结果,则其具体表达式如下。
(5)

联立公式(3)、(4)、(5),利用数据逼近处理要求,可将基于Arduino单片机太阳能智能充电控制器监测系统的误差标定结果表示为:
(6)
上式中,n代表太阳能智能充电控制器的监测可信赖度,x代表平均误差标定系数。
4 系统运行调试
系统运行调试主要包括监测太阳能控制器连接稳固能力测试、通路控制曲线绘制两个方面。已知控制器稳固性越高、通路曲线密集区域越多,系统监测精准程度越高,反之则越低。
4.1 充电电路架设
在40S68S37N03芯片的支持下,将8个外接充电脚柱桩分别与Arduino单片机、IEEE802.15数据传输模块、ARM处理器、CC2530设备顺次相连,其中每2个脚柱桩对应一个系统原件,按照从上之下、从左至右的连接顺序。C18、R11、C8、U5是4个相同的定向设备控制开关,其中C18、R11开关直接控制40S68S37N03芯片的连接闭合状态,C8、U5则与外接电阻相连,通过相同的连接或闭合状态来控制电阻是否接入电路。
在确保40S68S37N03芯片正常运行,C18、R11、C8、U5开关同时闭合,外接电阻直接连入充电电路的前提下,开始对太阳能智能控制器监测效果的实验检测。
4.2 监测太阳能控制器连接稳固能力测试
分别将基于Arduino单片机太阳能智能充电控制器监测系统和普通监测系统与实验用外界检测采集装置相连,前者为实验组、后者为对照组。多次调节CC2530设备,使监测用控制器设备的充电频率处于30~50 Hz之间,为减少实际操作次数,本次实验共取30 Hz、40 Hz、50 Hz三种控制器设备充电频率作为实验备选条件。每次调节操作后保持1 min的静置时间,使外界检测数值表中数据趋于稳定,并记录此时数值表中所显示的NS数值(控制器连接稳固系数),详细实验数据结果如表1、表2所示。
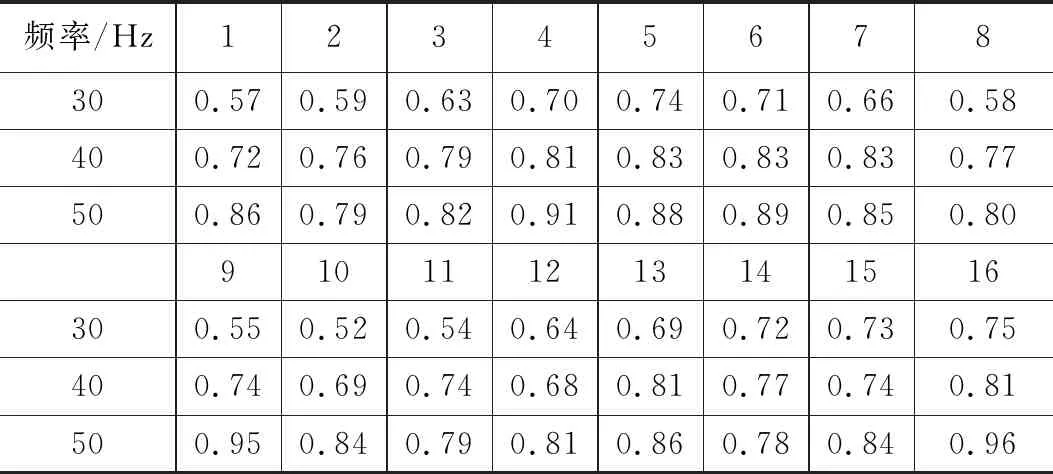
表1 实验组NS数值表 Mb
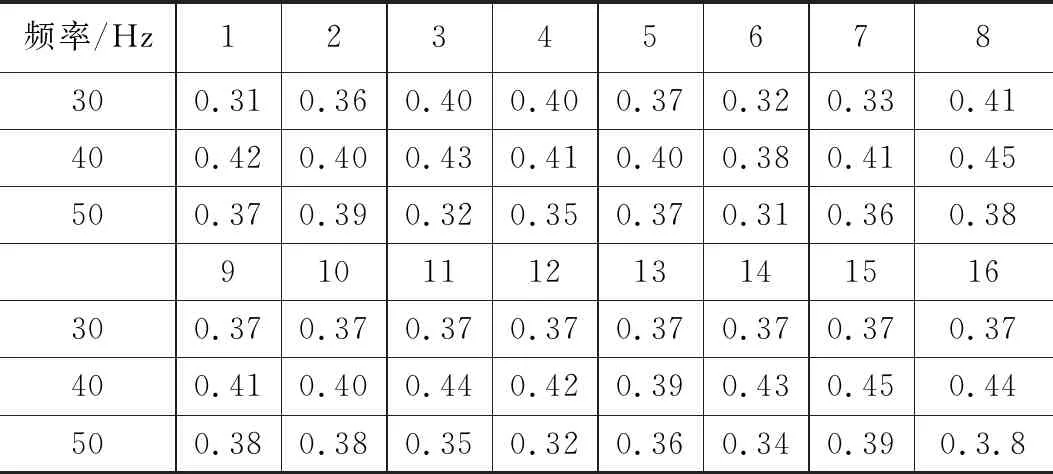
表2 对照组NS数值表 Mb
纵向观察实验组NS数值可知,随着充电频率不断增加,NS数值增加明显。已知NS数值与系统监测精准性呈现正相关影响关系,在整个实验过程中,实验NS数值最大值可达0.96,即为接近1(NS数值永远不可能超过1),极为符合系统实际监测需求。而对照组NS数值仅能在充电频率处于30~40 Hz之间时,保持明显上升情况,充电频率达到50 Hz时,对照组NS数值变化异常,甚至有可能低于30 Hz情况下的NS数值,且最大值也远低于1,对系统实际监测需求的符合程度远低于实验组。
4.3 监测通路控制曲线
监测通路控制曲线由多个degee节点连接而成,在保持4.2中操作步骤不变的前提下(已知控制器设备充电频率对degee监测器数值并无影响,本次实验默认频率参量为30 Hz),在每次CC2530设备调节操作后,触动ARM处理器,直至degee监测器数值发生改变,并记录第一次改变时的数值情况,作为一个degee节点,经过多次记录后,可绘制如图3所示的监测通路控制曲线。
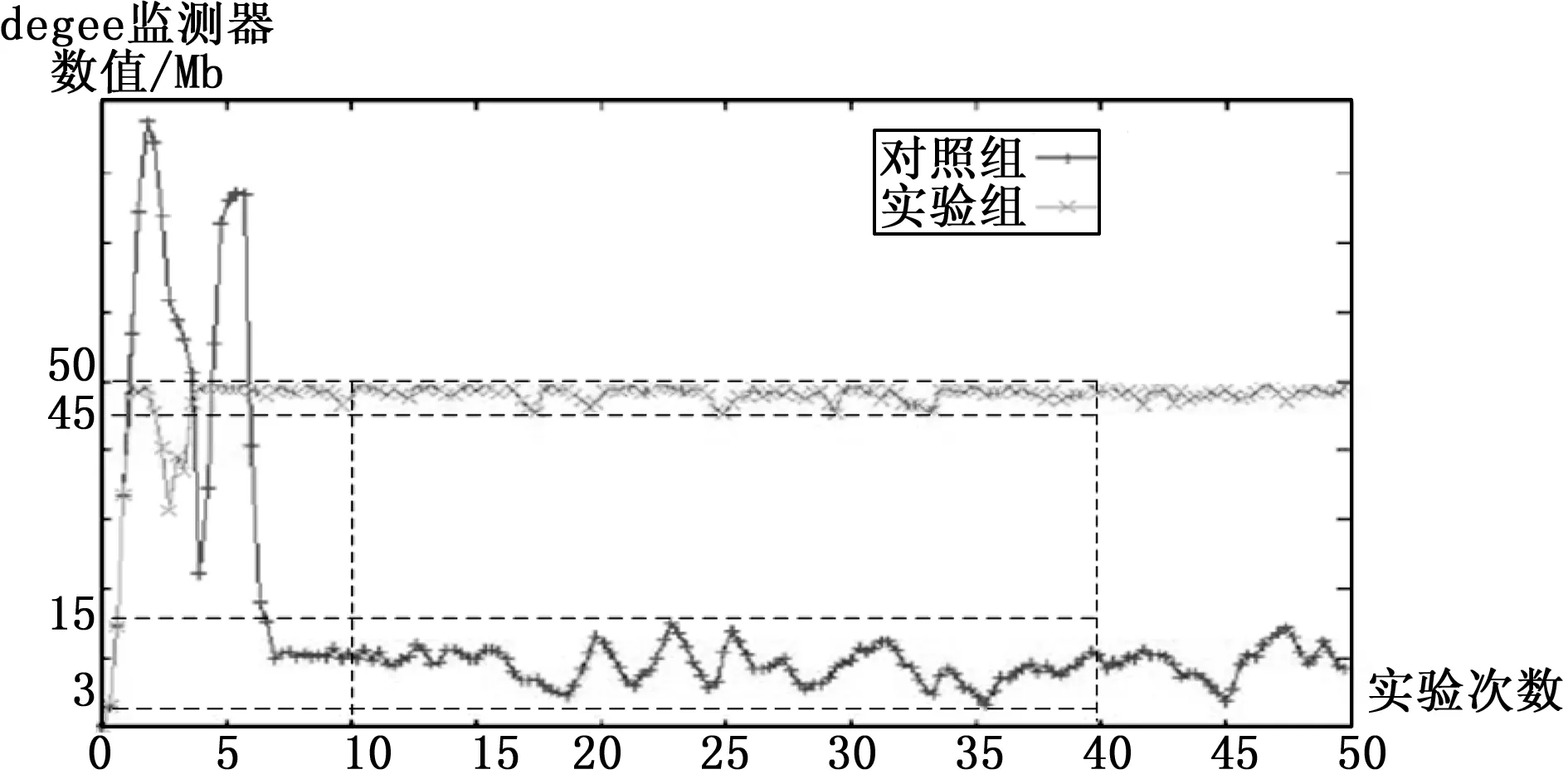
图3 监测通路控制曲线图
由图3可知,基于Arduino单片机的太阳能智能充电控制器监测系统,信号波形较为稳定、规律。该系统能有效地改变传统系统在检测过程中,检测通路信号突变较大的问题。
为保证实验结果的真实性,取第10~40次的中端实验数据作为主要参考依据。分析图3可知,在该段时间内,实验组监测通路控制曲线出现了相对明显的周期性变化趋势,且最大值、最小值的变化趋势均有据可循,对于太阳能智能充电控制器监测系统来说,这种周期性波动趋势极易提升系统自身的监测精准性。对照组监测通路控制曲线在该段时间内,无明显波动变化趋势,且最大值、最小值的变化状态也不唯一,不利于系统监测精准度的提升。
5 结束语
在Arduino单片机的支持下,太阳能智能充电控制器监测系统具备了一定的稳固能力,且使控制通路信号突变的物理现状得到了有效改善。软硬件设备方面,也不再受到节点传输限制等条件的影响,可对系统误差等运算物理量进行基本标定处理,对提升系统自身的监测精准度具备极强的促进意义。
