基于FCN与视场柱面投影的隧道渗漏水面积检测
2019-08-29
(上海大学 机电工程与自动化学院,上海 200444)
0 引言
城市地铁隧道在施工和运营过程中,由于复杂的地质条件、气候变化和施工工艺设计维护等问题,使隧道在长期使用中会出现裂缝、渗漏水、起壳和错台等病害。如果不能及时发现和维修,常会导致隧道衬砌病害的发生。传统的隧道结构病害检查,主要采用人工巡检目测、手工记录和拍摄照片等方式进行数据采集,但使用这种数据采集方式,受主观因素的影响,不可避免地会发生误判、遗漏等错误,且费时、费力,危险程度高、效率低下。近年来,以计算机视觉技术为依托的图像处理检测方法在该领域进行了相关研究[1-5]。这种检测虽然在一定程度上带来了大量的隧道结构表面基础图像数据,但由于隧道盾构拼装的多缝及管道、管线、油漆数字等的遮挡干扰,使得图像数据异常复杂,从而导致检测难度不断加大。而且病害的出现不仅会降低混凝土的强度,对隧道衬砌造成损伤,影响结构安全,而且极有会可能降低隧道的服役寿命,对城市轨道交通的运营造成巨大的安全隐患。因此,在城市地铁大规模建设的情况下,对隧道病害的检测、评估和处理显得至关重要。在此种情况下,快速、准确、高效的自动检测方法对于解决上述问题具有重要意义。
1 相关研究内容
1.1 传统隧道渗漏水检测方法
传统目标分割算法已经发展很成熟,大致可分为基于轮廓的方法,包括边缘检测,轮廓搜索、分水岭算法(Watershed Algorithm,WA)[6];基于区域的方法,包括全局阈值、局部阈值、动态阈值、多分辨率阈值、过度区阈值等。此外,还有大律法[7]、区域生长法[8]、分水岭法等,但是不足之处在于,传统目标分割算法对于遮挡光照、阴影等干扰的影响较大。E Protopapadaki[9]先从原图中提取灰度、边缘、频率、熵、纹理、HOG等17个低级特征,再将这些低级特征输入卷积神经网络获得高级特征,最后将高级特征输入多层感知机实现隧道病害的识别系统中,其得出的结果要很大程度上优于使用人工神经网络、支持向量机、K近邻算法和决策树等方法得出的结果,这些方法在面对复杂的干扰识别率时更容易受到较大影响。Zhang等[10]通过深度卷积网络、支持向量机、集成学习三种方法对路面裂缝的图像分类进行了对比研究。Zhao等[11]针对难以识别的微小裂缝,提出了从任意分配的像素点筛选出裂纹簇的聚类方法,在此方法的基础上,建立了全局凸分割模型.但由于采用了传统图像处理核心工作之一的手工设计特征的方法,因而效率低,周期长,且又因为检测方法的鲁棒性差,导致在关于结构病害相关检测中的准确率不能令人满意。
1.2 深度学习FCN检测方法
Marvin Teichmann[12]对隧道病害目标进行了几何分析,使用的是目标分割算法利用Deep Learning[13]算法进行目标分割具有较好的鲁棒性。FCN[14]对图像进行像素级的分类,从而解决了语义级别的图像分割问题,2017 年加拿大Cha[15]等采用深度卷积网络对混凝土裂缝的识别进行了研究,结合滑动窗口方法可以检测任意大小的图像,并与 Canny、 Sobel 两种边缘检测算子进行比较,从而验证了深度学习在混凝土裂缝识别上的优势。2017年中国黄宏伟等[16]利用FCN深度学习算法进行盾构隧道渗漏水病害图像识别精确度方面的确有所提高,但没有考虑到隧道柱面形状对实验结果的影响。
综上所述,传统的检测隧道渗漏水面积,不能很好地避免灯光、拼缝、螺栓孔、遮挡物(管线、管道)、抗钢铁支架晃动、抗拖影干扰等对面积检测计算的影响,忽视了隧道拱形柱面几何形状带来的误差,因此通过采用基于FCN与视场柱面投影算法,经过视场转换与柱面投影修正,从而获得更为精确的隧道渗漏水病害的面积。在大连隧道中对OSTU、迭代法、分水岭法三种传统检测隧道渗漏水病害进行对比,验证了该算法在隧道渗漏水病害检测的优越性。
2 FCN结合视场柱面投影模型的方法
如图1所示, FCN结合视场柱面投影模型方法的整体框架,下面将基于该框架对本方法的详细介绍。
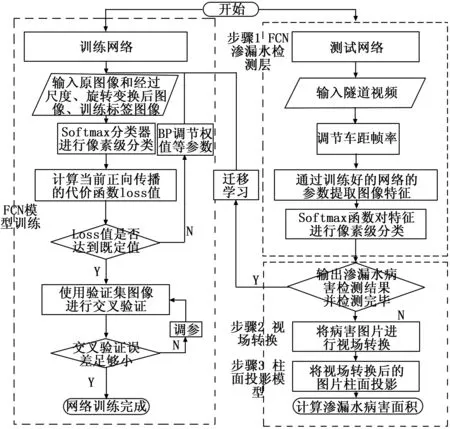
图1 FCN结合视场投影方法框架
2.1 隧道渗漏水病害无人巡检系统
如图2所示,隧道渗漏水病害检测系统由云台,Gopro相机阵列,磁条导航,避障模块,RFID 路标,装置底盘等模块组成,在自动巡检车在隧道行进途中进行图像和激光采集时,先依据视场长度进行帧率提取,接着对采集视频图像进行畸变矫正,最后把处理后的图像输入如图3的基于FCN与视场柱面投影的算法中。
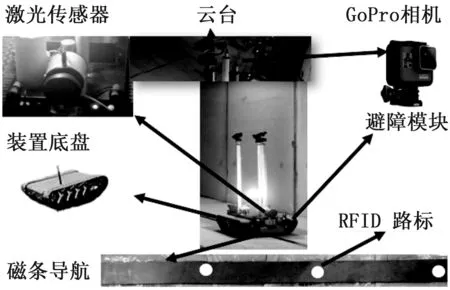
图2 隧道渗漏水病害无人巡检车
2.2 基于FCN与视场柱面投影算法
基于FCN与视场柱面投影算法结构如图3所示。
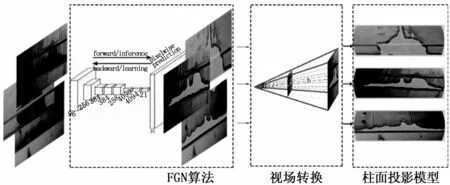
图3 基于FCN与视场柱面投影的算法结构图
其步骤如下:
2.2.1 数据预处理
图4(a)是实验所用的数据集,总计1000张样本(b)是病害区域及病害区域标签制作效果图,首先对训练图片进行数据增强,为病害检测项目扩充图像,比如模糊,拼缝,油漆数字,遮挡(管道、管线),拖影,光线等针对这些识别的图片,生成相应的标签。
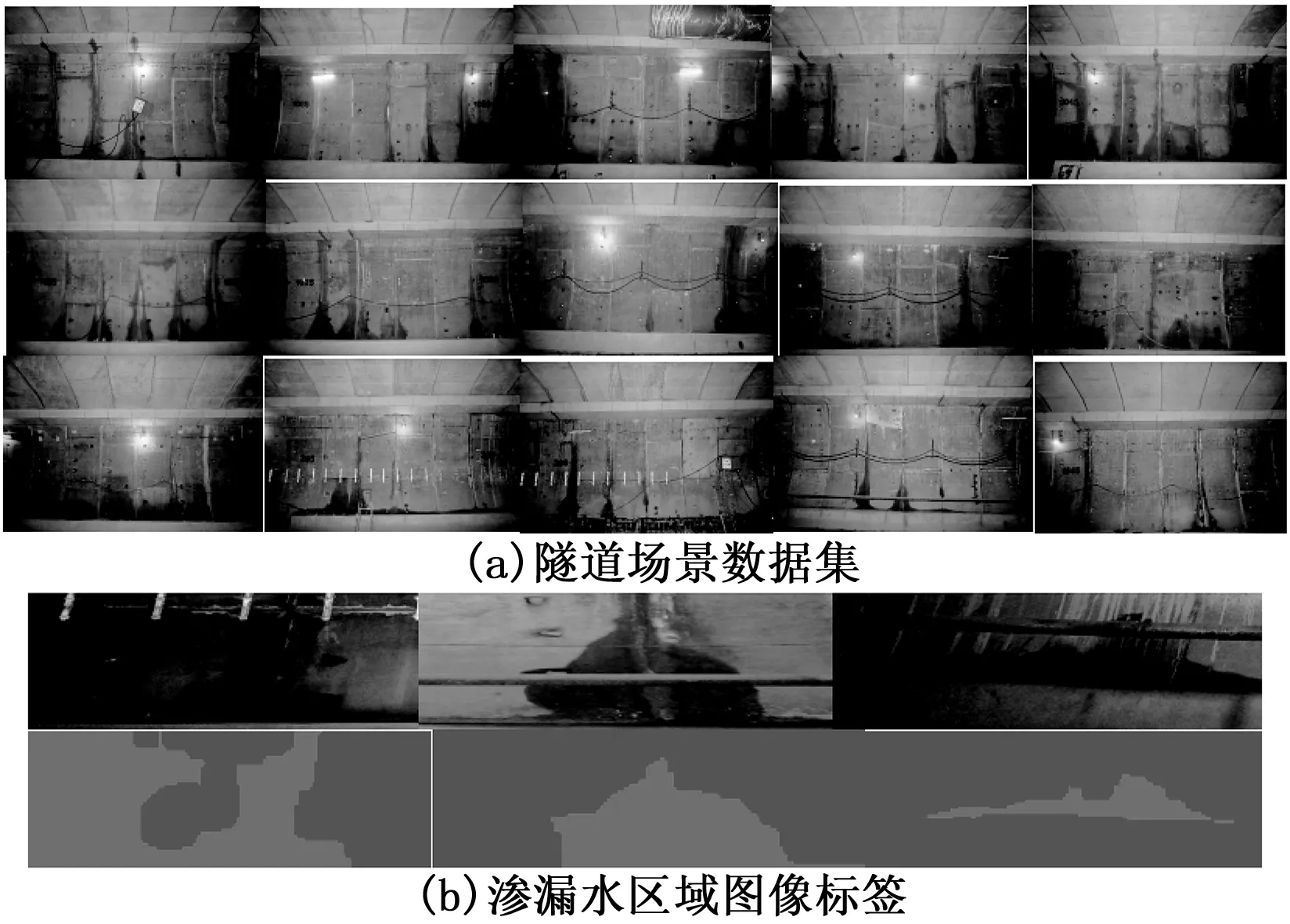
图4 隧道数据集与渗漏水区域图像标签
2.2.2 FCN渗漏水病害模型训练与检测
通过对原图的多次卷积、池化运算获得图像抽象的高维特征信息,将抽象的特征图还原到原图像尺寸,这样得到每个像素的预测。然后通过总体误差函数度量网络输出的预测图与对应标签图之间的误差的对比,完成一次迭代中的正向推理运算。随后采用随机梯度下降方法对总体误差函数进行最小化,并通过反向传播算法将误差的梯度进行反向传递,实现权值的更新,完成迭代中的反向学习运算。
2.2.3 渗漏水面积视场转换:
相机的视场图如图3视场转换部分,其可以将隧道检测到病害后的图片尺寸转化为实际尺寸,其计算公式如式所示:
(1)
(2)
其中:h是到物体表面的距离,N是图像中目标物体区域内像素个数测量值,目标物体区域内像素个数测量值P,S是物体实际面积大小,S[i]是相机整个视场范围内像素的个数;α和β分别是相机的水平视场和垂直视场,可以通过几何关系求出。由式所示在α、β、Q、P已知的情况下即可以求出目标物体区域的面积S,过程如图3的视场转换虚线部分。
2.2.4 隧道柱面投影
隧道无人病害巡检车所采用的Gopro相机阵列与所测目标的距离是通过激光测距的,而距离可以进行实时采集,采用的柱面投影模型可以将检测到病害的图片由平面还原为柱面,能更精确的计算渗漏水病害的面积。如图5柱面投影数学模型照相机的运动都发生在X-Z平面,在柱面空间K上的柱面投影图像J′。设柱面半径为r,投影角为θ,得到柱面图像的宽度为2rsin(θ/2),高度仍为H。图像的像素坐标均以图像平面中的最左上角像素为坐标原点。对图像J上的任意一点P(x,y),在柱面图像J′上的对应点为P′(x′,y′),对点P沿x-z平面和y-z的横截面分别如图5中的图(b)和图(c)所示,可得柱面投影变换公式:
图5 柱面投影数学模型
(3)
(4)
(5)
(6)
式中,x,y为原图的坐标,x′,y′为变换后图像的坐标,W,H为原图的宽和高,f=W/(2*tan(θ/2)),这里θ为相机水平视角。
3 工程实例分析
3.1 实验数据及配置
上海市大连路隧道,它是我国第一条江底隧道,采用盾构法施工的双向四车道隧道,全长2526.88 m,下面对上海市大连路隧道部分隧道作为工程实例进行分析。
本次实验采用的硬件平台是Dell深度学习工作站,操作系统为 Ubuntu16.04平台,编程环境基于Python,内存为24 GB,GPU为 NVIDIA GeForce 1070,在基于深度学习框架CAFFE下进行实验。样本数据集D划分为两个互斥的集合,其中一个集合作为训练集S,留下的集合作为测试集T,即D=S∪T,S∩T=φ。在S上训练出模型后,用T来评估其测试误差,作为对泛化误差的估计。保留类别比例的采样方式采用分层采样。D中含有500个正例,500个反例,当采用分层采样获取70%的样本的训练集S和20%的赝本的测试集T时,则S包含有315个正例和315个反例,T有92个正例和92个反例。
3.2 实验评价指标
实验评价标准病害错检率是指错检的像素数与图像总像素数的比值,其计算公式如式(7)所示:
(7)
式中,Pi为算法i的错检率,i分别取FCN方法、分水岭方法,OTSU方法,迭代方法, FCN结合柱面方法五种情况,Ni为算法i错检的像素数,Ntotai为图像中总的像素数。
评价指标平均误检率公式为:
(8)

3.3 实验结果及其分析
如图6以及表1实验结果所示。
对于第一类干扰——摄像模糊,由于地铁隧道地面不平整等因素的影响,自动巡检车在采集图像时,摄像头会失焦,从而导致采集的视频变模糊。相比其他三种传统的检测方法则会受到摄像模糊的严重干扰,深度学习FCN结合柱面投影方法则能有效克服摄像头模糊对渗漏水识别的影响,从而提高检测的准确性。
图6 不同算法在不同干扰下检测渗漏水结果图

方法1模糊2拼缝3曝光4拖影5阴影6遮挡平均错检率分水岭方法0.46430.48490.32380.54230.24440.17060.3717OTSU方法0.40070.36440.14320.48870.18550.12970.2854迭代方法0.41400.37020.19200.54670.18810.13030.3069FCN方法0.04380.08340.09780.02590.02800.02180.0501FCN结合柱面投影算法0.03110.05060.02910.03280.02080.00750.0189
对于第二类干扰—拼缝,红色油漆数字的干扰区域;由于修补过的拼缝与渗漏水色调会产生差异,很容易混淆遗漏, WA法受干扰影响最大,FCN与视场柱面投影算法受两种因素的影响较小,但对总体平均误检率相差较高。
对于第三类干扰——灯光照射。拍摄视频显示隧道中每隔一段距离会有灯光,而其余三种传统检测方法都误将数字的面积错误识别为渗漏水,尤其是OTSU法受干扰影响最大。而FCN与视场柱面投影算法相对传统方法则受灯光影响较小,但即使如此相对1、3、5、6类干扰约0.02误检率干扰而言,其0.097的误检率仍是最高的。而本论文采用的本盾构隧道检测系统的自动巡检车特针对此关键干扰自带了辅助光源,从而能有效解决光线对实际检测的影响,有效降低误检率。
对于第四类干扰——拖影。自动巡检车在行驶过程中,如果地面不平或有石子,会使镜头产生剧烈晃动,继而产生拖影现象。此外,遮挡也是隧道中常见的干扰,比如管道遮挡,传统的病害检测法会因为管道的遮挡,误将管道识别为渗漏水,而且光线暗的地方也极容易被错误识别,从而造成检测结果误差极大,即使是IA、WA法受拖影和遮挡的影响也同样大,而FCN与视场柱面投影算法没有受到光线渐变与拖影遮挡的影响。
对于第五类干扰——阴影。阴影是指灯光过暗或没有灯光或灯光被遮挡后产生的区域,图片数据采集时使用的自动巡检车由于自带光源,会极大降低阴影产生的影响。而IA、WA、OTSU三种传统的病害检测方法,虽然相对于其他组而言,阴影对这三组检测结果的干扰有了明显降低,但相对FCN与视场柱面投影算法抗阴影的能力而言,差距显而易见。
对于第六类干扰——遮挡(管道、管线)。传统的分水岭法虽然能有效克制管线造成的干扰,但却不能将管道从拍摄的图片或视频中剔除,但即便如此,相较于传统的OTSU和迭代法将管道和管线均错误识别为渗漏水而言,分水岭法优势仍旧明显。
图7是传统算法与FCN算法误检率对比情况,OTSU误检率平均为0.259,WA误检率平均为0.301,IA误检率平均为0.265,FCN算法误检率平均为0.05,得出FCN算法可有效避免摄像模糊,拼缝,油漆数字,遮挡(管道+管线),拖影,光线等干扰,特别是在克服台架、管线、管道等遮挡和巡检车行驶过程中晃动造成的拖影、未聚焦的模糊等干扰方面具有优越的鲁棒性。
图7 传统算法与FCN算法误检率对比图
如图8通过比较可以看出,FCN算法平均误检率约为0.05,FCN算法结合视场转换柱面投影平均误检率约为0.189,因此该算法比FCN算法误检率降低0.311,提升效果显著。因此FCN算法结合视场转换柱面投影模型在检测隧道渗漏水面积上更为精确。
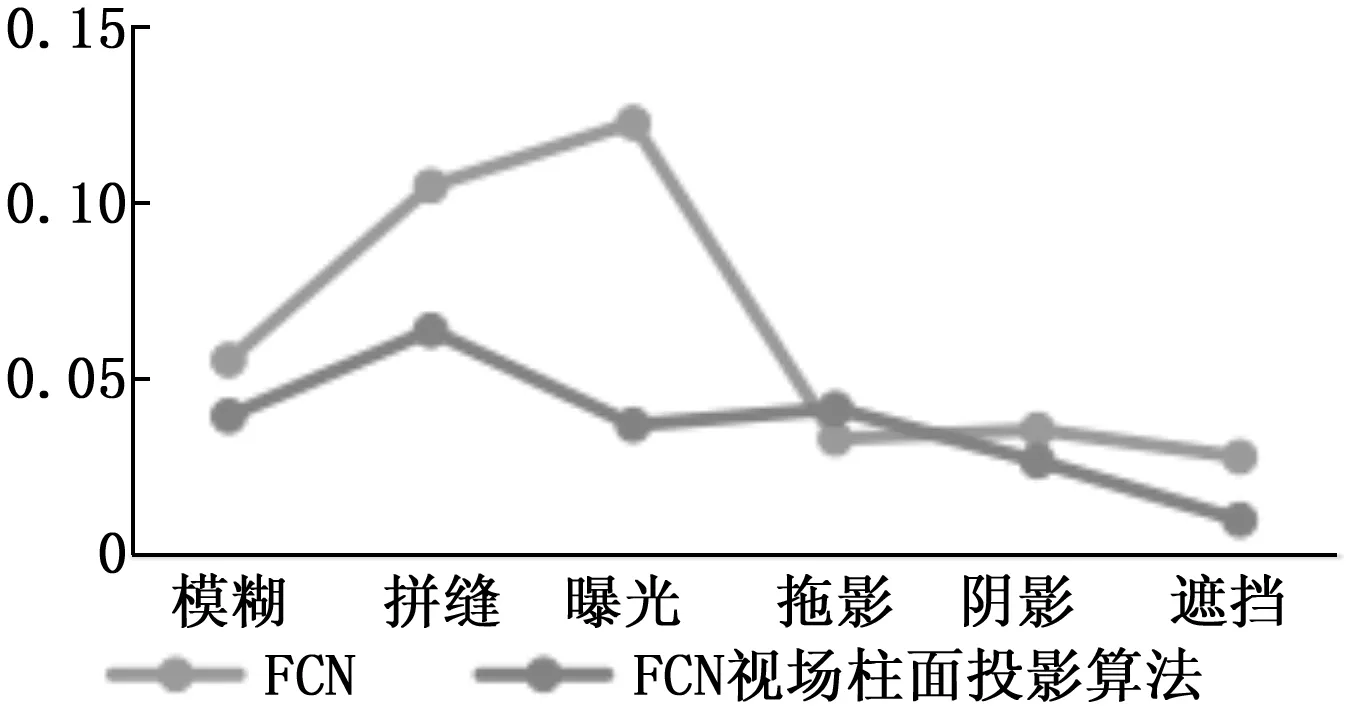
图8 FCN与FCN视场柱面投影算法误检率
对比图如图9,针对测试集92张图片渗漏水面积误检率图,其中Optimization是FCN算法,Our Proposal是FCN结合柱面投影算法,由图可知对数据集更大的样本检测,FCN视场柱面投影算法仍保持更低的误检率。
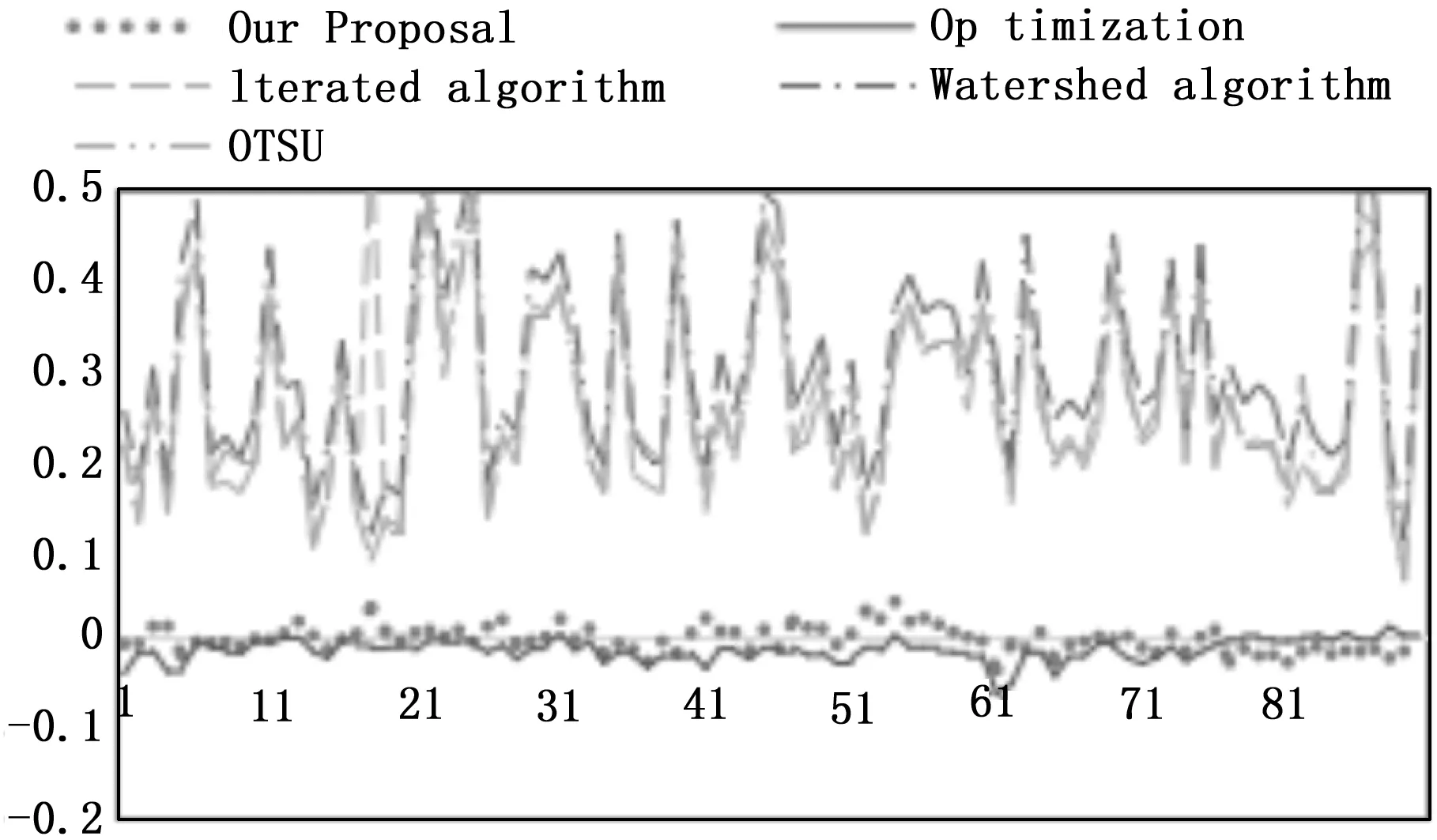
图9 92张测试集误检率图
4 结束语
在对隧道渗漏水面积检测计算方面,相对传统检测计算方法,如OSTU法、分水岭法和自适应阈值法相比,FCN结合柱面投影算法能有效降低灯光、拼缝、螺栓孔、遮挡物(管线、管道)、抗钢铁支架晃动、拖影等干扰。与此同时,以往的论文则没能考虑隧道的柱面形状对实际渗漏水病害面积计算误差的影响,而FCN结合柱面投影算法算法考虑了隧道几何柱面形状对渗漏水病害面积计算的影响,通过柱面投影模型将平面投影到柱面,在原有的FCN算法基础上取得了更精确的结果,平均误检率降为0.0189。
今后的工作将集中在以下3个方面:1)引进MaskRCNN、FasterRCNN、Yolo等对离线检测速率进行算法融合加速,减轻运算压力以及进一步排除复杂环境干扰;2)进行分布式集群环境搭建,对采集的大量数据进行深度提取、建模、分析,挖掘病害之间的联系,以防微杜渐,发现新病害,建立并更新病害数据库以供迁移学习,优化模型,提高准确率;3)增加数据集,扩大应用场景,增加可识别病害种类,比如裂缝、起壳、树脂修补区域等等。
