一种微型载人操作舱系统设计
2019-08-29于文泽
李 涛,杨 雷,于文泽,王 为,李 伟
(中国空间技术研究院载人航天总体部,北京100094)
1 引言
为探索太空甚至在地球以外的星球生存,需要舱外活动装备为航天员提供生存的环境,同时提高舱外活动能力,以满足复杂的在轨维修维护、加工制造和组装建造等任务需求[1-2]。目前国内外已有的舱外活动装备包括舱外航天服、气闸舱、载人机动装置和单人飞行器等[3]。舱外航天服内部为30~40 kPa的低压纯氧环境,航天员出舱需要执行氧浓度预控、气闸舱泄复压和吸氧排氮等操作,出舱准备时间超过3 h,造成空气资源损失和舱外有效活动时间减少。为克服内外压差阻力,航天员手、膝盖等部位与航天服挤压,接触位置易造成外伤、发炎等病痛,影响航天员健康。航天服内外压差导致航天员容易疲劳,一名航天员需1~2天恢复机能,导致复杂舱外任务只能分解为多次出舱,降低了舱外活动效率[4]。Griffin[5]提出了一种载人自主工作站MAWS设想,飞行器在密封舱外配置了3套机械臂,航天员可以利用其中2套机械臂爬行,利用推进系统进行无重力环境飞行。David等[6]提出了一种空间组装和在轨设施转移飞行器SCOUT概念设计,飞行器配置3套机械臂、1双航天服手套和1个球面形观察舱,飞行器质量超过2 t,航天员通过与航天服相同的观察窗进行操作。NASA格伦研究中心提出了一种在轨维修、服务和探测的单人飞行器Flex-Craft概念,该飞行器配置推进器和3套相同的灵巧臂,可爬行和维修维护,灵巧臂操作能力较强[4]。Griffin等[7]在FlexCraft基础上改进,设计了SPS单人飞行器,该飞行器配置了推进系统和2套机械臂,依靠航天服MMU推进系统进行移动,航天员在舱内控制机械臂进行舱外操作。
为克服舱外航天服内外压差和纯氧环境给出舱活动效率、安全带来的不利影响,微型载人操作飞行器成为研究热点。针对未来空间站和载人深空探测中设施建造、在轨加工、原位资源探测和利用等复杂操作任务需求,本文提出一种微型载人操 作 舱 (MiniOperating Manned Spacecraft,MOMS)总体方案,航天员可直接从空间站等母体航天器进入操作舱,在机械臂等辅助设施支持下快速到达工作点,执行抵近观察和复杂操作任务。
2 需求分析
2.1 功能分析
1)提高时间和气体资源利用率。舱外航天服内部为30~40 kPa的低压纯氧环境[8],为避免减压病,航天员出舱需要执行氧浓度预控、泄压、大流量冲洗、吸氧排氮等操作,从准备出舱到完成过气闸舱,需要2~3 h,泄压操作需要向舱外排出约25 kPa的空气,导致空气资源损失,如图1所示。舱外航天服携带的氧气等资源支持航天员工作7~8 h,去除出舱和返回消耗的2~4 h,实际舱外作业时间只有3~5 h,因此需要提高出舱活动时间和资源利用率。
2)降低舱外操作对身体造成损伤。舱外操作需使出较大力气克服航天服内外压差和失重影响,长时间多次出舱,造成身体与航天服接触位置损伤,其中手、膝盖、脚趾损伤最多,如图2所示,身体疼痛会分散注意力,降低舱外操作效率,因此需要降低舱外活动对身体的损伤。
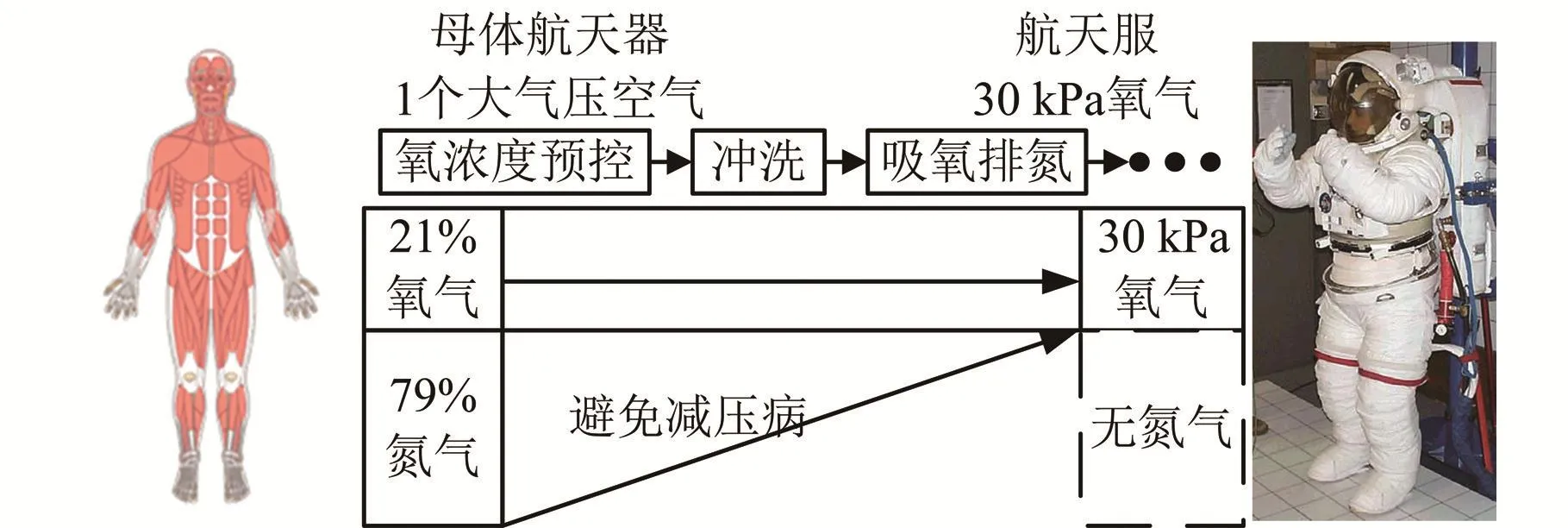
图1 出舱过程操作Fig.1 Extravehicular activity process
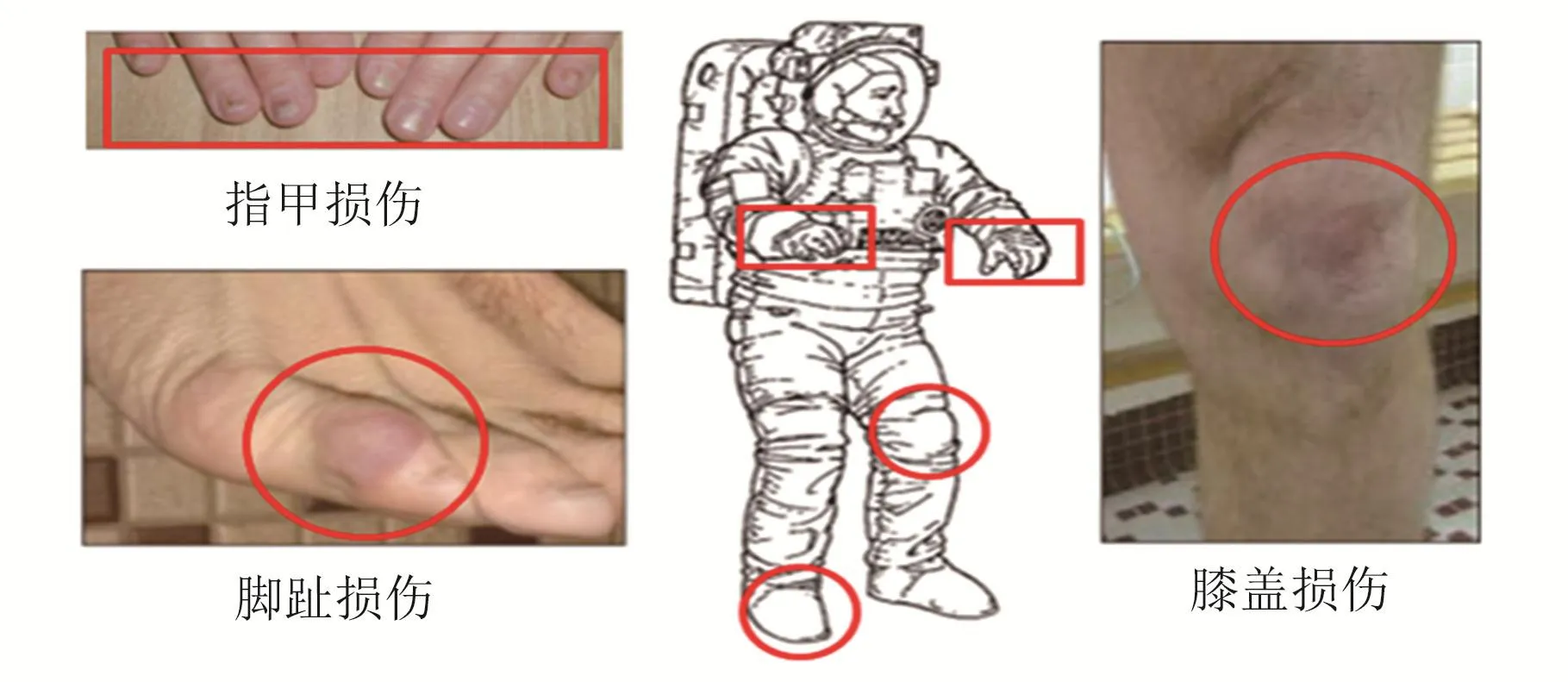
图2 舱外操作损伤Fig.2 Injuries to the human by EVA
3)提高连续执行舱外活动的任务时间。穿着舱外航天服活动时,航天员需克服30~40 kPa的内外压差,容易疲劳,为恢复身体机能,航天员需要间隔1~2天才能再次出舱。因此复杂舱外任务只能分解为多次出舱,这又增加了出舱准备绝对时间,降低了舱外活动有效时间比例,无法满足太空基地建造、原位资源勘探等复杂舱外任务。因此在提高舱外连续活动时间的同时,需提供舒适的操作环境。
4)提高微流星碎片和辐射防护效果。舱外活动存在微流星和碎片威胁,舱外航天服由多层织物组成,微流星和碎片防护效果不足。因此面向未来高轨维修维护、载人深空等任务,远离地球磁场保护和地球补给,需要辐射防护效果更好的舱外服务装备。
由此可见,针对目前舱外服务装备的不足,有必要研究更为安全、可靠和舒适的舱外操作服务装备。为克服目前舱外活动装备内部低压纯氧气环境、外部为软质织物带来的问题,需要研制一种刚体结构的微型载人飞行器,其需要具备如下功能:
1)结构。提供1个大气压密封环境,为设备提供安装支撑功能,对微流星、空间碎片等进行防护,平时停泊在母体航天器上。
2)能源。为舱外转移和操作期间设备提供电能,具备空间机械臂和蓄电池冗余供电功能。
3)信息。提供微型舱与母体航天器遥测遥控、话音、图像、微型舱机械臂控制功能。
4)环控生保。提供密封舱总压、氧分压和CO2分压控制功能,具备温湿度控制和应急补气功能。
5)热控。提供密封舱热控功能,可收集微型载人操作舱内航天员和设备散热,并向舱外散热,将温度控制在规定范围内。
6)操作控制。支持灵巧臂,支持空间机械臂辅助转移。
2.2 技术指标分析
与国内外已有舱外活动装备相比,微型载人操作舱需要提供更长的任务时间和结构安全性,通过微型载人操作舱功能分析,结合国内外调研分析,总体技术指标如下:
1)操作舱总重量需<900 kg;
2)操作人员1人;
3)目前舱外航天服支持航天员工作7~8 h,为提高连续舱外活动时间,支持舱外操作时间需≥12 h,同时具备扩展能力;
4)支持机械臂辅助转移。
3 总体设计
微型载人操作舱需要为航天员出舱活动提供必要的生存环境,因此操作舱必须提供密封环境、环境控制与生命保障、能源、通信和照明。为完成舱外操作任务,微型载人操作舱需要提供航天员操作视野观察窗以及操作工具。舱外航天服手套存在易损、不灵活等缺点,因此可配置灵巧臂和适当的工具,灵巧臂可根据舱外任务进行专门设计,为支持设备和工具的传递等操作,需提供2套灵巧机械臂。在失重环境下操作,需要提供助力装置,要配置1套支撑臂。因此微型载人操作舱设计由密封舱、观察穹顶、2套灵巧臂、1套支撑臂、1个空间机械臂适配器、1套对接机构、照明灯、摄像机和通信系统等组成,密封舱内配置环境控制与生命保障系统,总体构型如图3所示。
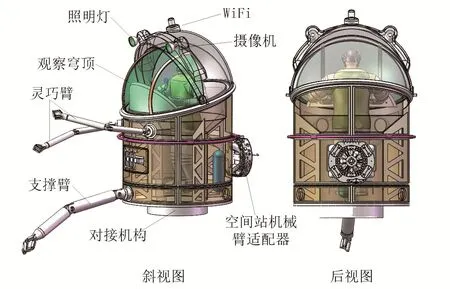
图3 微型载人操作舱总体设计Fig.3 Major elements of mini operating manned spacecraft
3.1 结构
微型载人操作舱适用的航天员身高为160~172 cm、坐高为86.5~97.1 cm、体重为55~70 kg。微型载人操作舱结构主要包括4个部分:密封舱、穹顶组件、设备安全支架和防护结构。密封舱结构设计主要考虑失重环境下航天员上肢操作空间和中性体位[9]。由于失重环境航天员视椎体中心线下降14.7°[10],因此观察穹顶下降15°。结合机械臂操作台和其他设备布局,微型载人操作舱穹顶外径设计为1.4 m,观察穹顶采用聚碳酸酯材料,透光性和抗力学性能良好。过渡段和通道均采用铝,如图4所示。
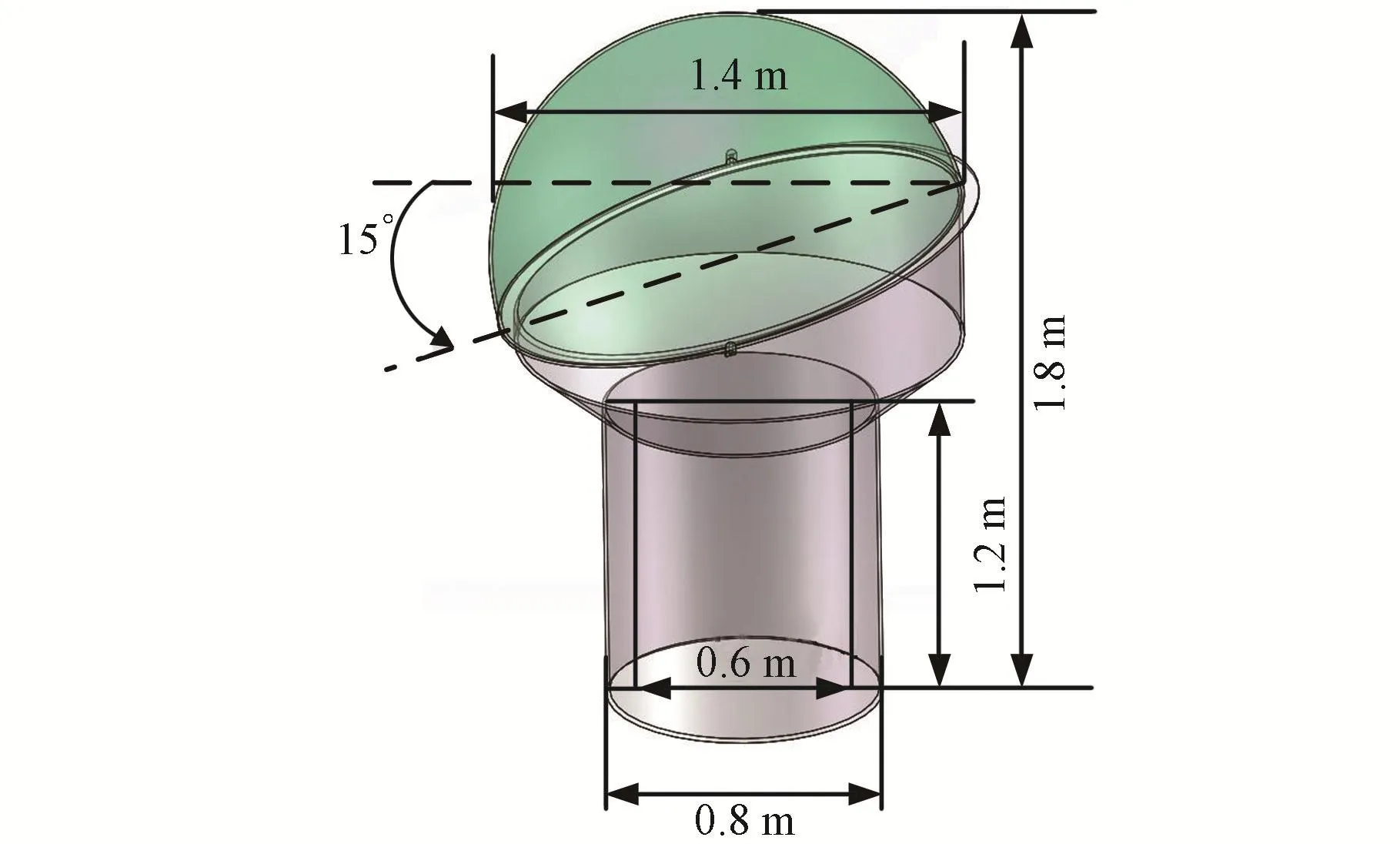
图4 密封舱结构设计Fig.4 Structure of pressured cabin
穹顶组件覆盖在观察穹顶上,保护观察窗,为摄像机、WiFi、照明灯等舱外设备提供安装支撑,为舱外设备电缆安装和布局提供空间。穹顶组件内含可旋转的面罩,当微型载人操作舱停泊空间站期间,可将面罩旋转下来,完全关闭观察窗;当乘员进入密封舱后,可通过按钮开启面罩,用于观察,如图5所示。
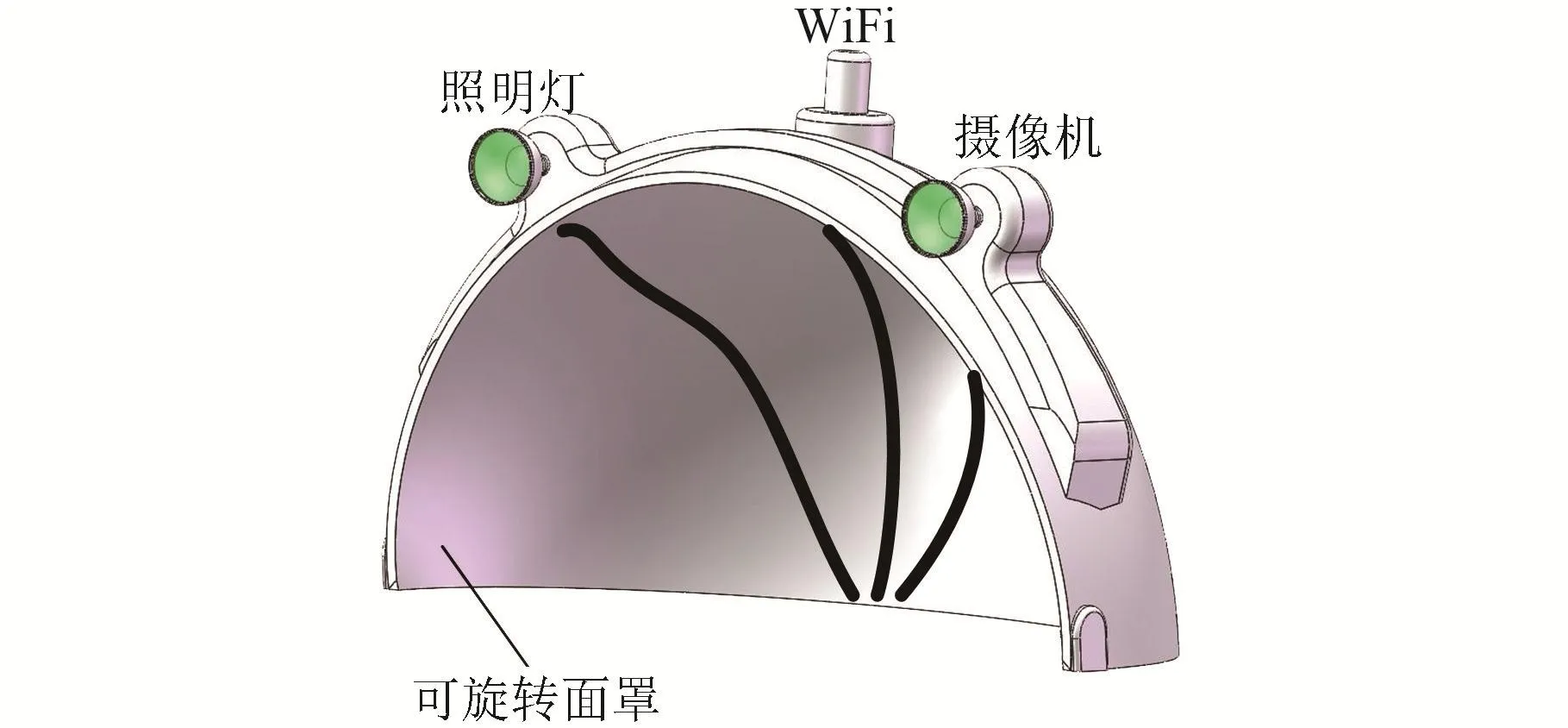
图5 观察窗穹顶组件Fig.5 View window assembly
设备安装支架为舱内与舱外设备安装、线缆固定、辅助设施存放等提供结构支撑。安装支架一共4块,均匀安装在密封舱通道外侧,为减轻重量,支架均为镂空设计,如图6所示。
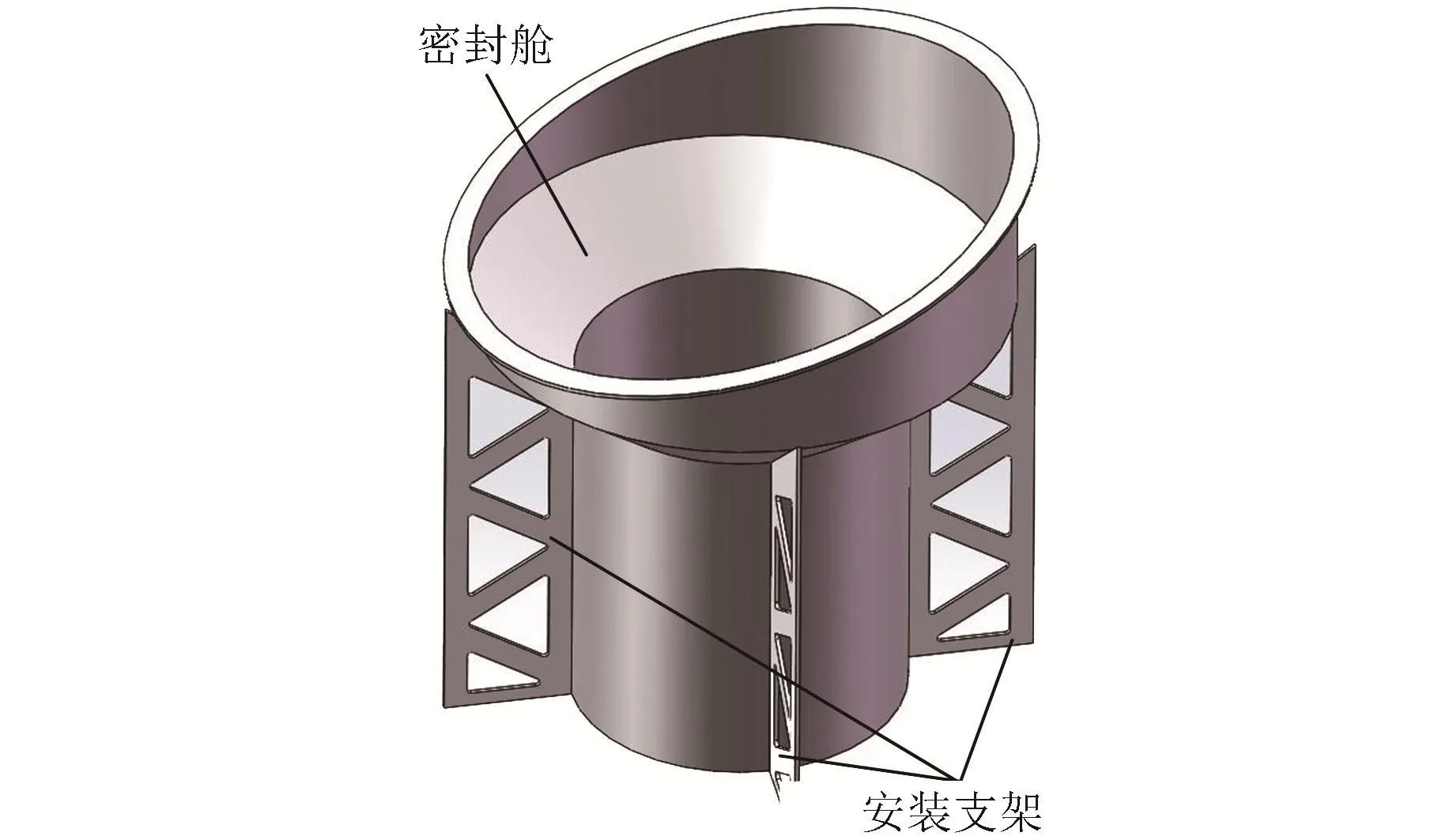
图6 设备安装支架Fig.6 Equipment fixing bracket
防护结构为微型载人操作舱提供微流星/空间碎片防护,采用Whipple防护结构[11],如图7所示。
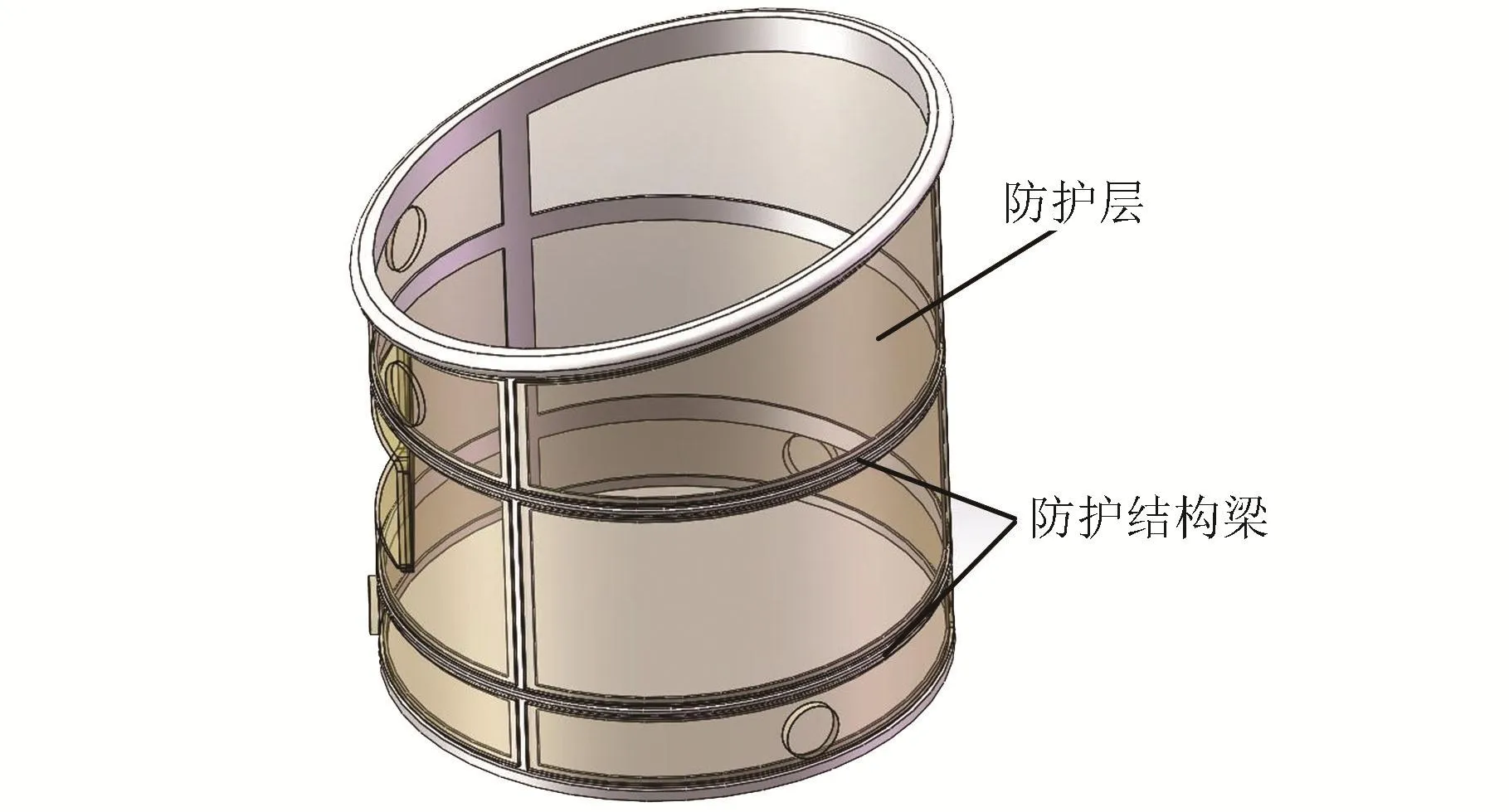
图7 Whipple碎片防护结构Fig.7 Whipple debris shield structure
3.2 能源系统
为提高微型载人操作舱的安全性和可靠性,能源系统采用蓄电池供电和空间机械臂供电冗余手段。微型载人操作舱停泊期间,母体航天器对蓄电池组充电;执行舱外操作任务期间,空间机械臂供电,蓄电池备份。
配电系统设置100 V双母线,通过选通开关形成2个相互隔离的配电母线,2个母线独立控制,提高了供电可靠性。每条母线采用100 V高压分散配电体制,形成二级树形独立配电体系,其中母线控制单元实现对电源功率通道的切换、隔离选通,配电通道将电能分配到功率控制单元,功率控制单元按照不同功率等级分配到各个负载;单机内设置厚膜DC/DC实现电能的变换和应用,功率控制单元配送100 V和28 V电源,如图8所示。
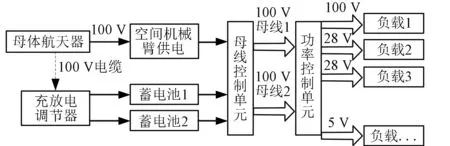
图8 能源系统Fig.8 Electrical power system
3.3 信息系统
微型载人操作舱信息系统包括测控系统、系统网及通信网,如图9所示。
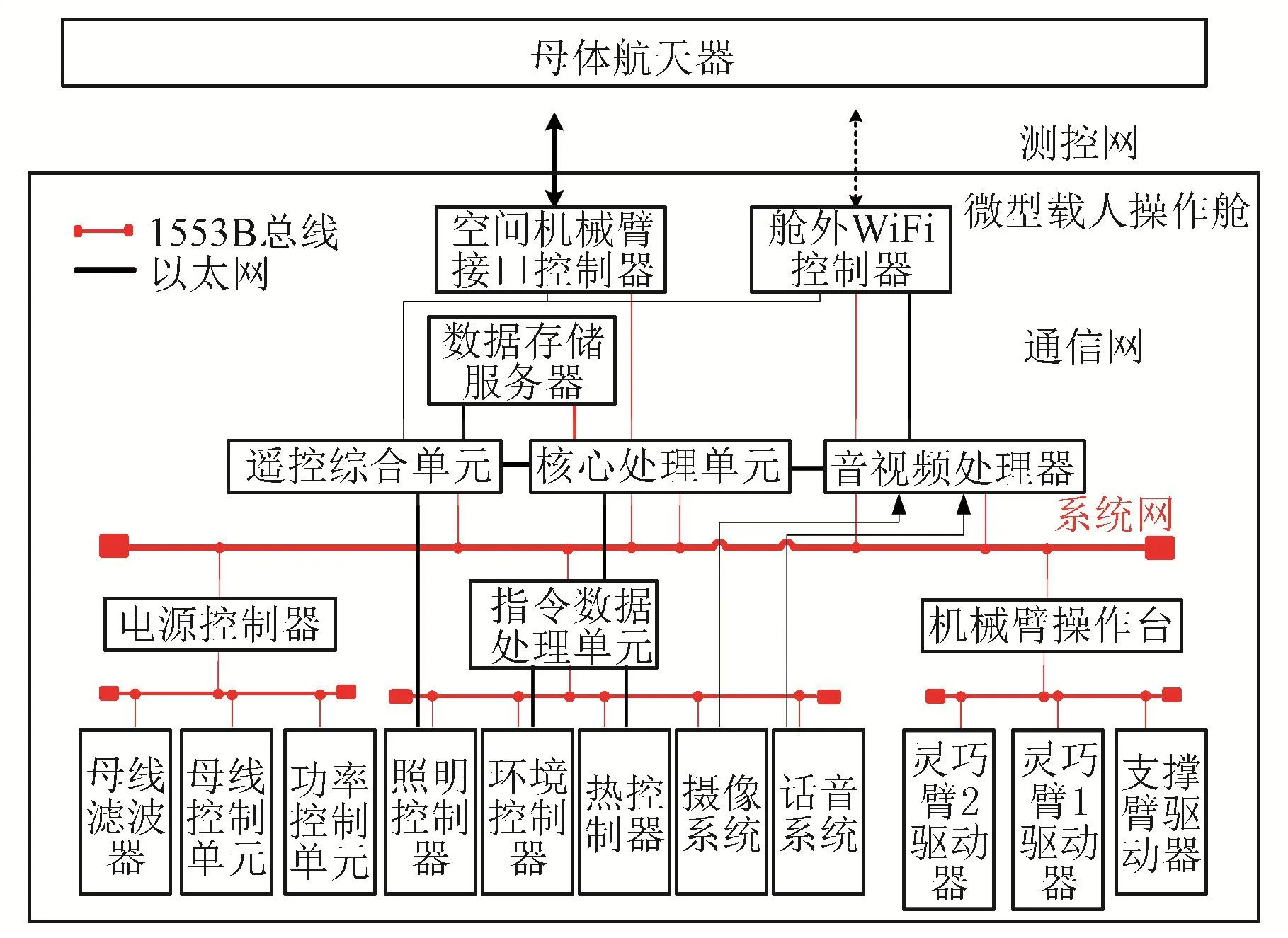
图9 测控通信系统Fig.9 TT&C and communication system
1)测控系统。在母体航天器宽波中继器支持下完成微型舱与母体航天器的遥测遥控和低速话音与图像传输。
2)系统网。依托分层的1553B总线及挂接于各层总线的计算机实现微型载人操作舱设备和机械臂的遥测、指令以及工作模式控制。系统网由核心操作单元作为数据处理中心,采用分级总线和综合电子实现设备指令、遥测、仪表显示等数据管理,并与通信系统互连。
3)通信网。依托千兆以太网和接入交换机组成高速通信网络,依托无线WiFi接入AP设备实现高速图像、话音、仪表显示、移动信息服务。
3.4 环境控制与生命保障系统
3.4.1 总压控制
总压调控通过总压控制系统实现,如图10所示。系统由2个气瓶组件、供气软管、1个气源控制组件、1个座舱供气组件组成。气源采用可移动式高压气瓶,气瓶组件由气瓶、充气阀、气瓶压力传感器、截止阀、减压器组成一体式结构。减压器出口采用快接接头和供气软管管路连接。气源公称工作压力30 MPa,容积10 L,减压压力0.6~0.8 MPa。气体为70%氮气和30%的氧气混合气体组成。
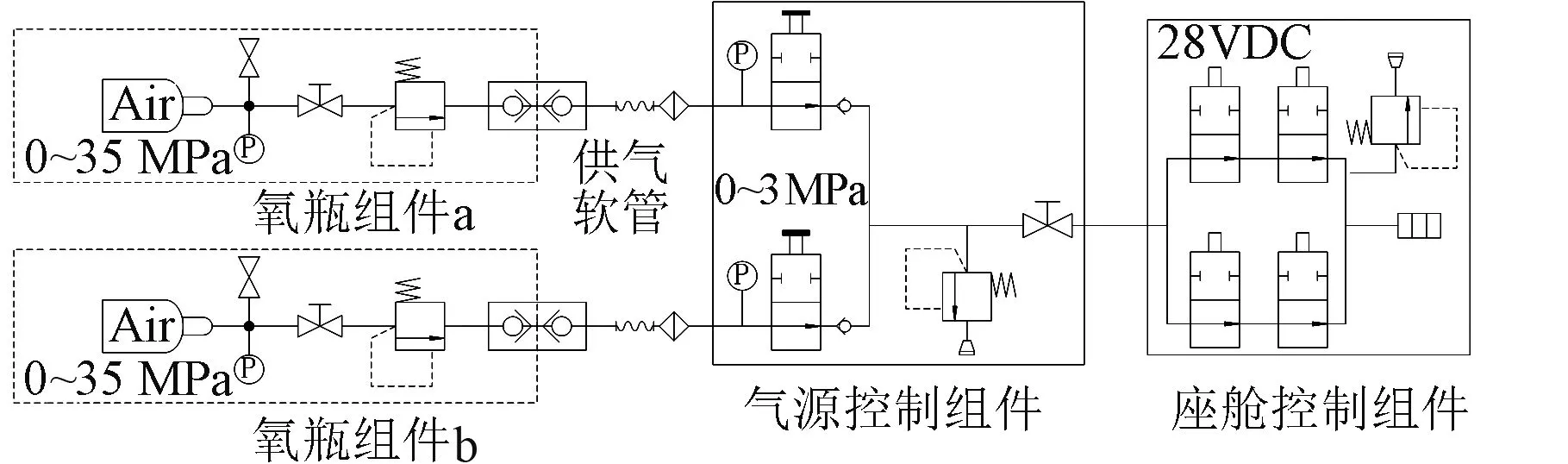
图10 总压控制系统Fig.10 Total pressure control system
为提高可靠性,气源控制组件设计2条支路,同时连接2个气瓶组件。每条支路设计减压压力传感器、放气阀和单向阀,2支路汇合后,在下游设置安全阀和截止阀。气瓶组件和气源控制组件之间管路设计为软管,端接口采用成熟载人航天器快接接头,易于航天员拆卸、更换气瓶组件。供气软管中设置过滤器,保护下游设备。座舱供气组件是开关控制部件,主要由4个电动控制的供气自锁阀串、并联组成,出口设置供气信号器,输出供气开关信号。
3.4.2 氧分压控制
氧分压控制通过非再生式氧分压控制系统实现。非再生式氧分压控制系统由高压氧瓶组件、氧源控制组件、座舱供气组件组成。设备组成与工作原理同总压控制系统一致。
氧分压控制系统配置2个高压氧瓶,每只氧瓶公称工作压力30 MPa,气瓶容积2 L,减压压力0.6~0.8 MPa,氧气量除满足工作时间需求外,还需兼顾应急供氧需求。氧气输送管路将氧气排入通风系统管路,通过通风系统对流实现密封舱内氧浓度均匀。
3.4.3 CO2分压控制
CO2分压控制通过非再生式CO2净化系统实现,在通风系统的配合下,实现对CO2浓度场及水蒸气浓度场的控制。
CO2净化系统配置1个CO2净化风机、1个过滤器、2套净化回路,每条回路配置1个CO2净化罐,单个净化罐净化能力为1 kg,组件总重1.7 kg。非再生CO2净化系统继承载人航天器成熟技术和产品,如图11所示。
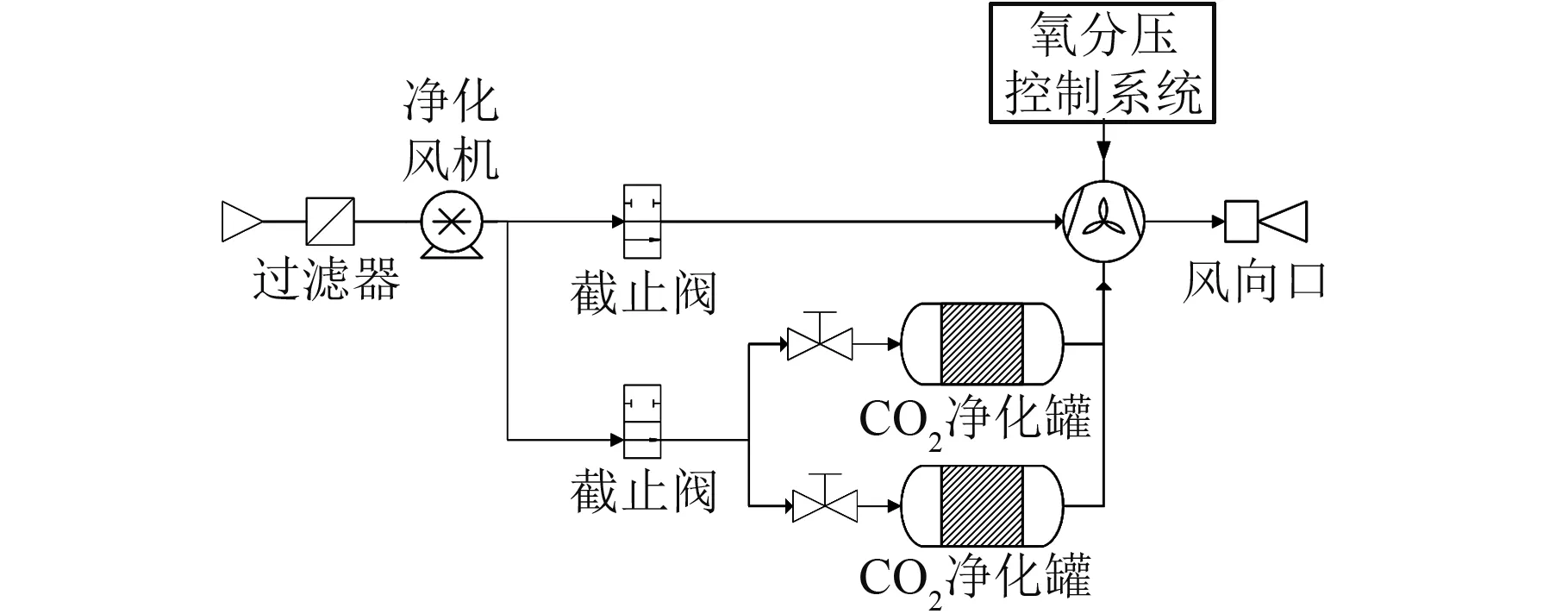
图11 CO2分压控制系统Fig.11 CO2partial pressure control system
3.5 热控系统
微型载人操作舱热控系统以主动控温为主、被动控温为辅。被动控温措施包括在微型舱外包覆多层隔热介质,在密封舱内侧包覆热控泡沫,隔绝外空间对密封舱内热环境的影响。主动热控系统包括冷干组件、换热器和水膜蒸发散热器。设备和航天员产热由通风系统收集,通过换热器进行热交换,并将热量通过蒸发少量水分进行真空排散,如图12所示。
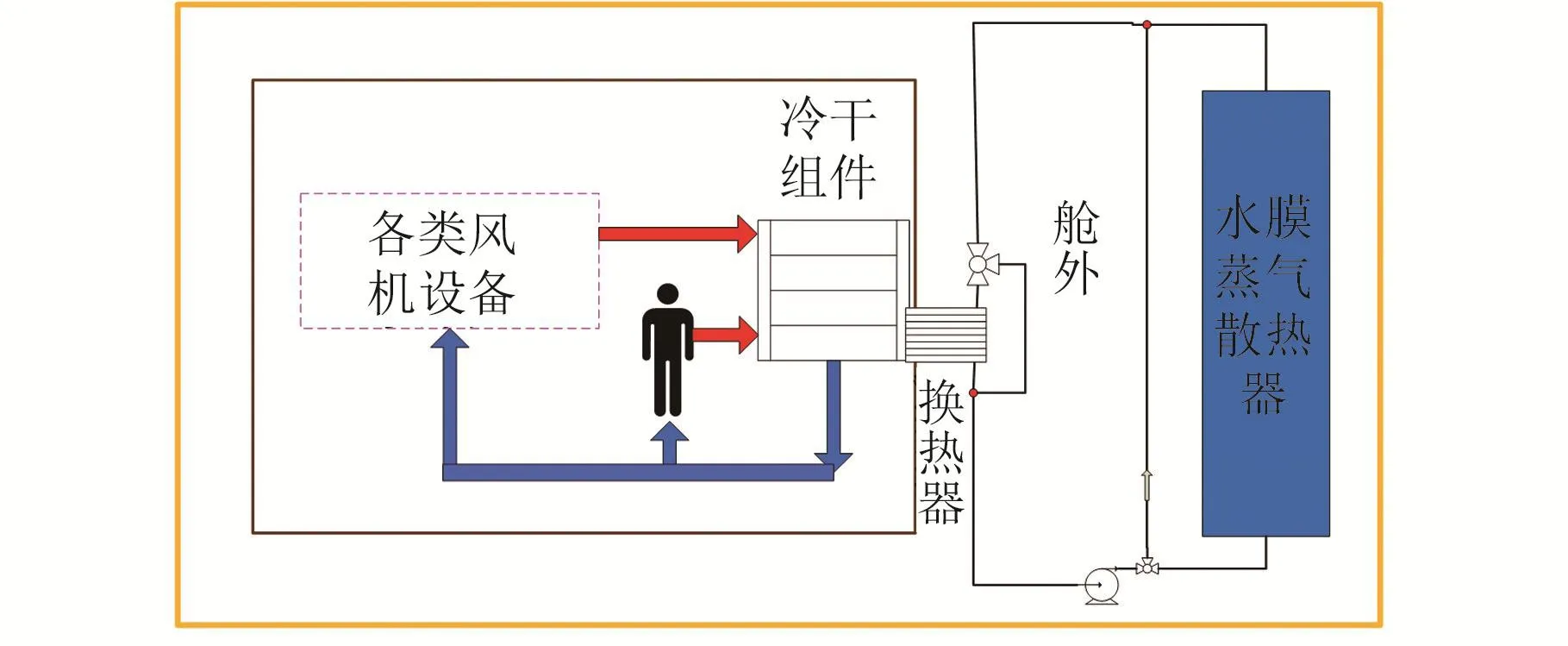
图12 热控系统Fig.12 Thermal control system
3.6 操作系统
操作系统主要配置2套灵巧臂和1套支撑臂及其操作台,如图13所示。灵巧臂安装于密封舱过渡段,支撑臂安装于密封舱通道上,均位于乘员正前方,3套机械臂共用1个操作台,操作台设计2套操作手柄,可支持2套灵巧臂同时操作。
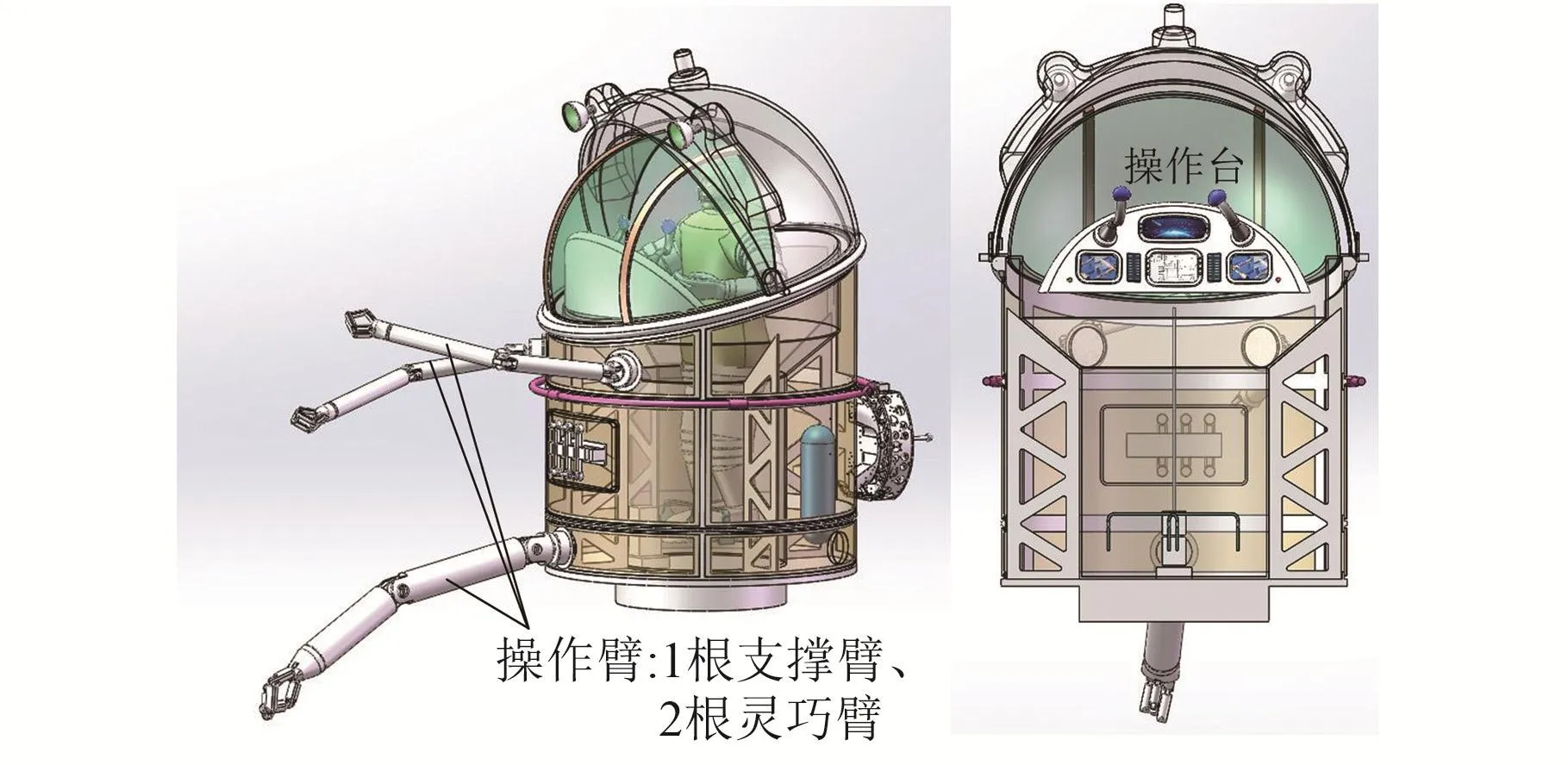
图13 操作系统Fig.13 Operating system
4 可行性分析
4.1 重量分析
按照微型载人操作舱的各子系统设计以及我国载人航天器已有设计经验,设备配套总共47台,如图14所示。
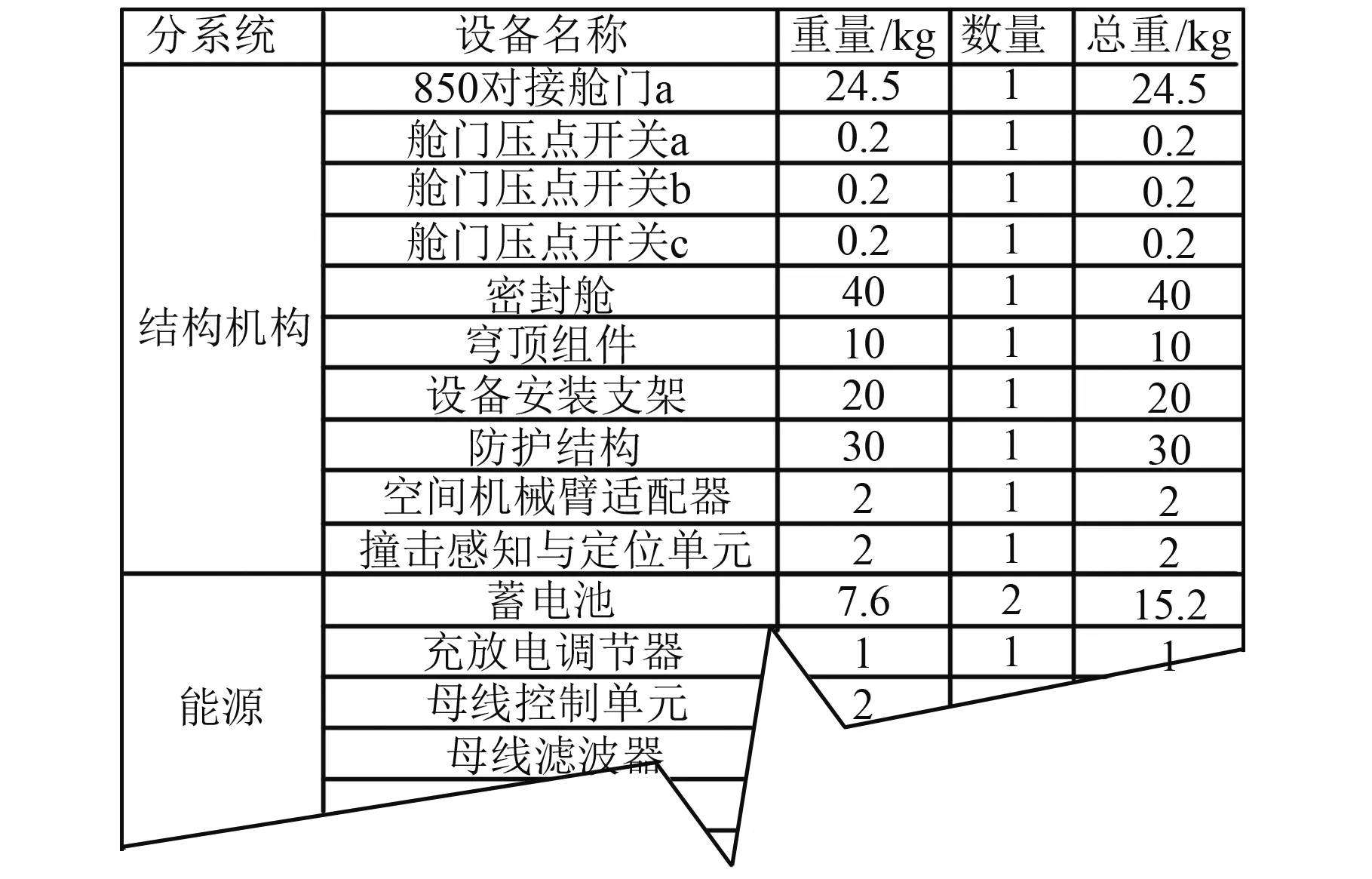
图14 微型载人操作舱设备配套清单Fig.14 Equipment list of MOMS
根据成熟载人航天器产品类推微型载人操作舱产品重量,整舱总重880 kg,如表1所示,小于900 kg,满足指标要求。
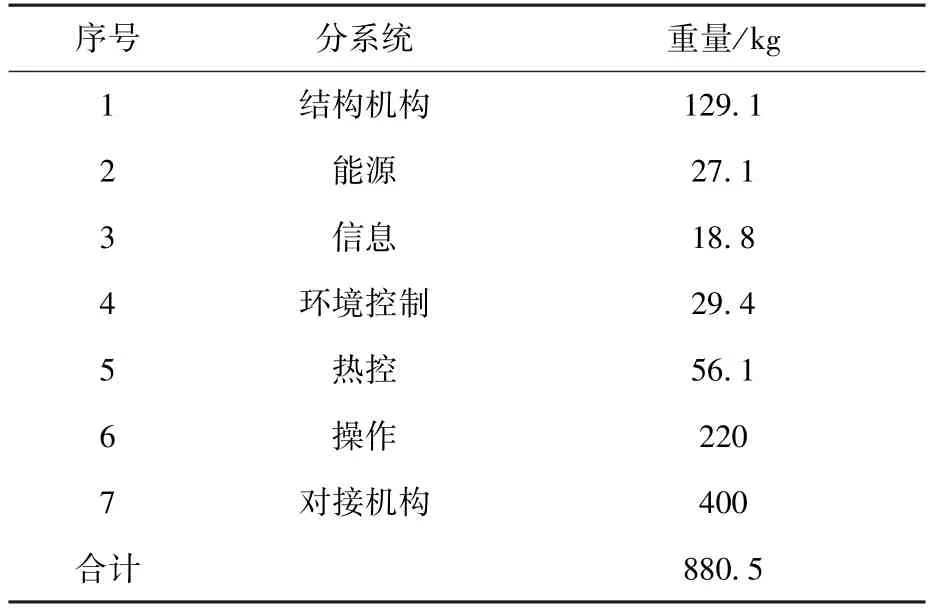
表1 MOMS重量分析Table 1 Weight analysis of MOMS
4.2 氧分压控制
为保证氧分压大于21 kPa,氧瓶供氧量需大于航天员氧气消耗量,航天员在轨氧气消耗量计算公式如式(1)所示。

式中,QO2为氧气消耗量,kg;vO2为航天员在轨氧气代谢消耗速率,L/h;T为出舱活动时间,h;MOL为摩尔常数,取22.4 L/mol;M为氧气摩尔质量,取32 g/mol;a为安全系数。根据航天员在轨平均代谢速率统计结果,如表2所示,按轻度活动计算,航天员在轨代谢参数为26.4 L/h,考虑气瓶排放效率和安全余量,取安全系数为1.5。根据冗余备份和2倍裕度设计原则,按照满足1人24 h的氧气量进行设计,则氧气需求量为1.35 kg。微型载人操作舱配置氧气瓶2只,每只储氧量为0.8 kg,满足1人12 h操作需求。
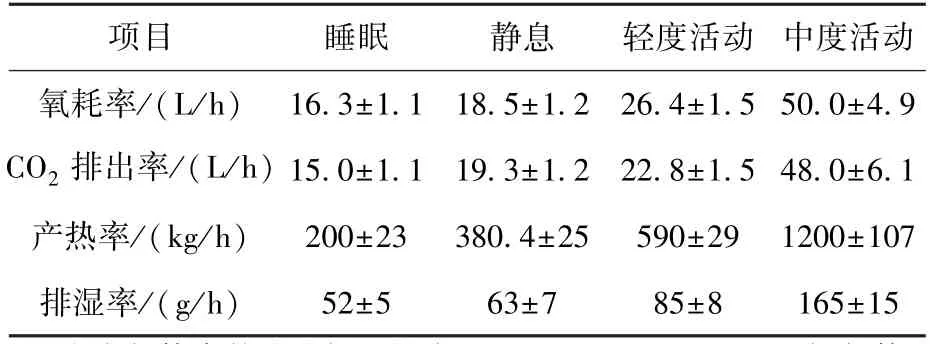
表2 航天员在轨代谢速率[12]Table 2 Astronaut on-orbit metabolism data[12]
4.3 CO2分压控制
为保证CO2在规定范围内,CO2排出量需小于净化罐净化能力,航天员在轨CO2排出量计算公式如式(2)所示。

其中,QCO2为氧气消耗量,kg;vCO2为航天员在轨氧气代谢消耗速率,L/h;T为出舱活动时间,h;MOL为摩尔常数,取22.4 L/mol;MCO2为氧气摩尔质量,取44 g/mol;a为安全系数。按照航天员轻度活动计算,正常乘员CO2排除率22.8 L/h。按照满足1人24 h的CO2净化需求进行设计,安全系数1.5,则净化CO2总量为1.6 kg。沿用成熟载人航天器CO2净化罐设计,单个净化罐净化能力为 1 kg,配置 2个净化罐,CO2净化总量为2 kg,满足指标要求。
4.4 对比分析
对舱外航天服、FlexCraft单人飞行器和本文设计的MOMS微型载人操作舱对比分析,结果如表3所示。可以看出,与舱外航天服相比,MOMS出舱活动准备时间更短,任务时间更长,无需吸氧排氮和泄复压,防护能力更强;与FlexCraft相比,MOMS重量小,可利用空间机械臂和自身灵巧臂转移,同时可利用空间机械臂传输能源,安全性更高。
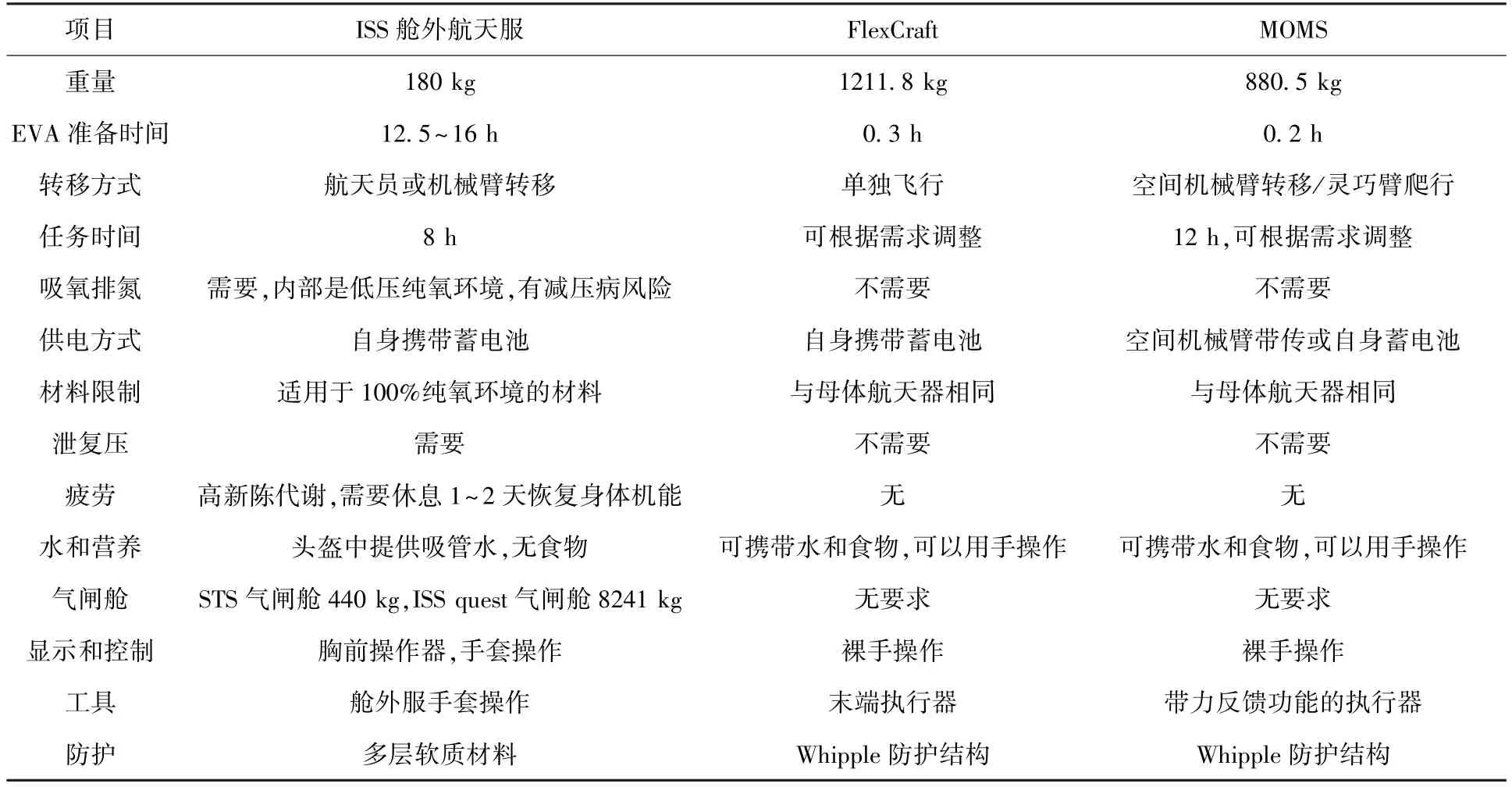
表3 舱外操作设备对比分析Table 3 Comparison and analysis of EVA
5 结论
1)针对载人深空探测中太空基地建造、设备在轨加工、原位资源利用等复杂操作需求,提出的微型载人操作舱总体方案满足指标要求、方案合理可行。
2)微型载人操作舱平时停泊于空间站等母体航天器的对接口,密封舱内为1个大气环境,出舱活动时无需航天员吸氧排氮,无需泄复压,航天员直接从母体航天器进入操作舱。关闭舱门后在空间机械臂等辅助设施支持下直接进行转移,执行抵近观察和复杂操作任务,提高了出舱活动效率,降低了气体资源排散。
3)微型载人操作舱总重量<900 kg,可容纳操作人员1人,舱外操作时间≥12 h,支持舱外服手套和灵巧臂等操作接口,适用于未来人类进行复杂的空间设施建造、资源开发利用和空间站扩展应用相关任务。
