基于肌肉神经活跃度反馈的航天服关节助力技术研究
2019-08-29吴庆勋廖平平张利剑
崔 翔,刘 昊,吴庆勋,廖平平,张利剑
(北京机械设备研究所,北京100854)
1 引言
载人登月任务越来越关注科学和经济价值,作业活动逐渐丰富,例如地质探测、科学实验、资源样本采集等任务中,航天员需要完成大量的行走、蹲起、搬运以及负重等动作[1]。随着航天员出舱活动越发频繁,出舱时间也越来越长,提高其舱外作业能力是载人航天的关键技术之一。
航天员穿戴航天服完成舱外作业,航天服具备人体重要关节的被动自由度,但服内大气压造成自由度运动困难,航天员关节运动阻力较大,且受航天服整体质心外移影响,航天员空间动作执行很不轻松[2-3]。例如,受阿波罗航天服影响,人服系统单关节的施力能力平均下降可达20%,而人体力量下降可达50%。因此,通过航天服关节助力系统提升航天员作业能力具有很强的背景需求。
外骨骼机器人是典型的穿戴式人体助力系统,例如美国加州大学的单兵外骨骼HULC[4],雷神公司的XOS[5]。中国多家科研单位如北航、哈工大、电子科大等也研制了多种用途的助力外骨骼系统[6]。在空间领域应用中,外骨骼类助力系统能够提升航天员空间作业能力[7-8]。NASA联合佛罗里达州人机认知机器研究机构,基于机器人航天员Robonaut-2的相关技术开发了X1外骨骼机器人,但其不具备关节主动助力的能力[8]。目前,中国电子科大、哈工大及北京机械设备研究所等研究单位开始在航天员助力系统方面开展研究[9]。
由于存在厚重的航天服,航天员与助力系统之间存在大阻尼环节,造成助力系统与航天员存在物理隔离,接触力传递的灵敏度下降,导致航天员的运动意图难以通过接触力、加速度等位置或力传感器直接获得。人体关节运动都是由中枢神经系统控制肌肉发力实现的,肌电信号(electromyogram,EMG)是人体运动的触发信号。由于EMG能够先于人体运动反映运动意图,因此基于EMG的辨识方法可实现对着航天服航天员运动意图的实时辨识,但获取方法更难、算法更复杂。
目前,对EMG信号的研究多集中在运动评估、发力时机预测等方面,用于运动意图控制[10-13],对基于EMG的量化肌力辨识研究很少,主要原因在于EMG信号属于微弱电信号,导致有效信号干扰源特别多。此外,EMG反馈肌力特征涉及多种复杂的生理学模型,由EMG得到准确的肌肉力信息较为困难。针对肌力识别问题需要借鉴神经-肌肉动力学过程[14]建立肌力特征模型,然后结合关节运动学模型实现由肌力到关节力矩的映射,从而实现基于EMG反馈的关节助力控制。
本文针对舱外航天员助力系统的人机协同控制问题,提出基于EMG分析实现对关节发力的量化识别,实时获取航天员发力意图与大小,进而精准满足对航天员的实时助力需求,实现助力系统与航天员之间的高效协同。
2 关节助力系统
由于航天服属于高价值装备,因此设计模拟航天服肘关节机构(模拟机构)模拟真实航天服肘关节,然后在其基础上研制基于肌肉活跃度反馈的助力系统样机。基于对航天服关节特性的公开数据,研制了转动关节式阻尼模拟器,利用橡胶材料摩擦及压力变化来模拟航天服关节阻尼,将该阻尼模拟器沿轴线安装于助力机构的肘关节,并根据航天服大臂、小臂连杆的质量特性设计助力机构的连杆,完成模拟机构设计。
模拟航天服的关节助力系统由博登拉线助力机构、EMG信号处理与分析子系统、测试与控制子系统等组成,如图1所示。
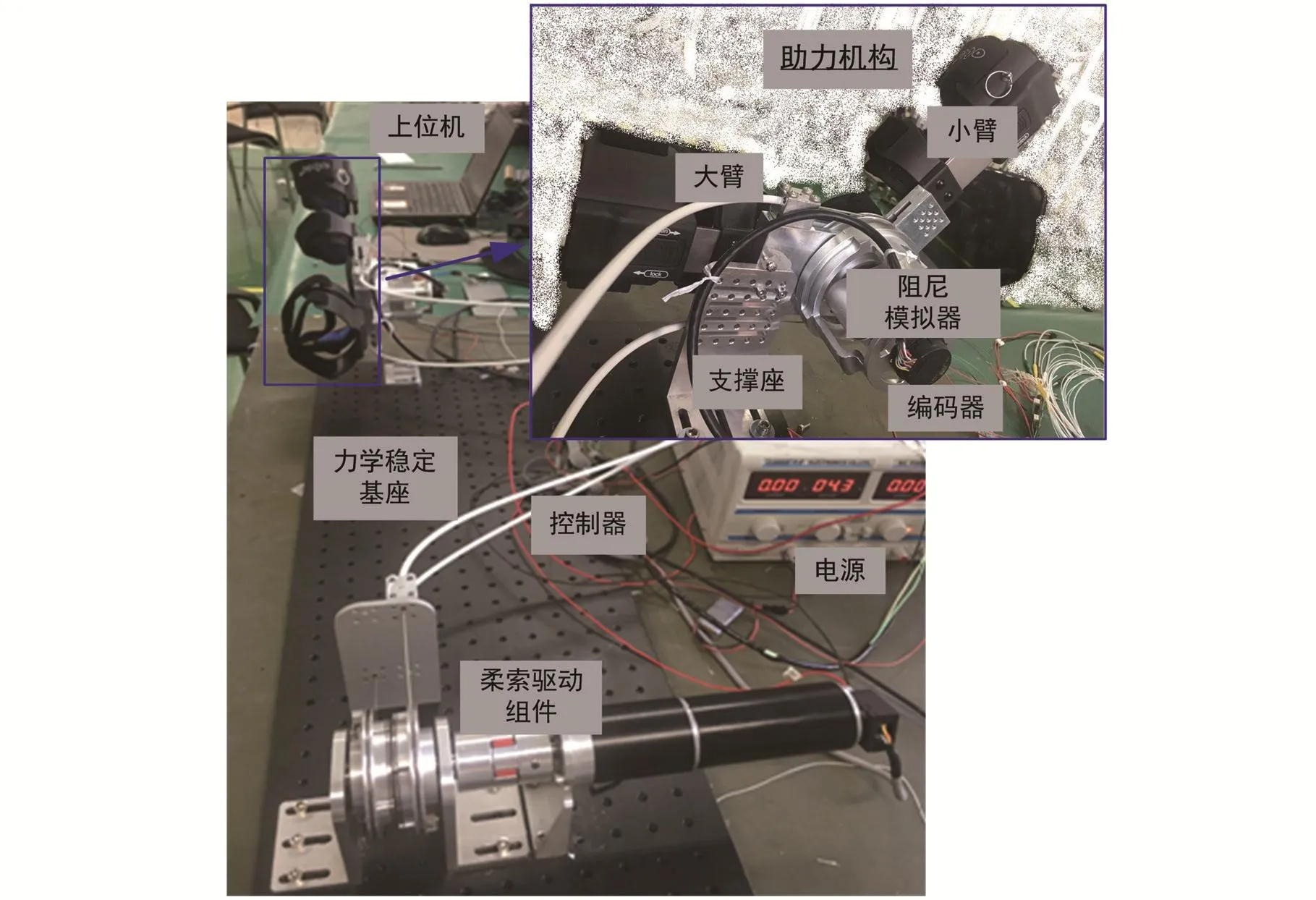
图1 关节助力系统的组成Fig.1 The architecture of joint assistive system
1)博登拉线助力机构。柔索驱动组件安装于固定基座,通过博登线鞘向助力机构肘部传力,助力机构通过绑缚结构与人体上肢固联。
2)EMG信号处理与分析子系统。采集与预处理目标肌肉EMG,而后根据建立的肌肉神经活跃度模型、肌力特征模型分析关节发力意图。
3)测试与控制子系统。该系统包括基于EMG肌力反馈的控制、航天服阻尼补偿以及负载补偿控制。核心控制器实现该关节助力控制算法,上位机提供检测与控制面板,实现对电机的驱动控制,如图2所示。

图2 航天服关节助力系统传感与控制流程Fig.2 Sensing and control flow chart of spacesuit joint assistive system
3 动力学建模
从肌肉接收中枢神经信号到关节运动的分析与建模可分为3个阶段:EMG活跃度分析、肌肉发力分析与关节运动建模。基于人体生理学方面的研究,通过标定实验辨识模型的未知系数得到合理的EMG动力学分析模型,然后将动力学模型作为控制器设计的基础。图3为一种神经-肌肉-骨骼关节动力学建模流程图。
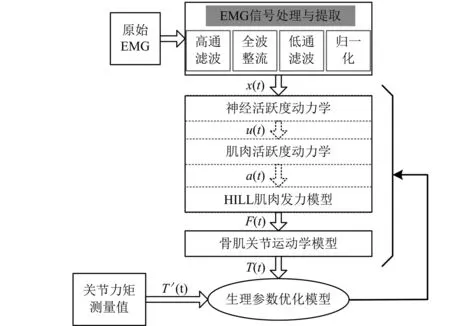
图3 神经-肌肉-骨骼关节动力学建模与优化Fig.3 The modeling and optimization of neuromusculoskeletal dynamics
图3中,原始EMG信号经过处理得到能够反映运动意图的EMG信号x(t),经神经活跃度动力学和肌肉活跃度动力学计算依次得到神经活跃度u(t)和肌肉活跃度a(t),而后得到肌力特征值F(t)。然后,基于骨肌关节运动学模型计算肌肉产生的关节力矩T(t)。 由于上述模型参量为人的生理学参数,很难实测,采用最小二乘法标定,即应用力矩传感器测量关节力矩T′(t),对比T(t),得到生理学模型参数的数值解。
3.1 神经-肌肉活跃度动力学建模
原始EMG信号混杂多种噪声(直流偏置、放大器误差及电极运动带来的低频干扰),采用高通滤波滤除,截止频率范围一般为5~30 Hz。之后,对信号进行全波整流。由于肌肉发力特征基本只与5~100 Hz频率范围内的信号相关,因此再通过截止频率为100 Hz的低通滤波器,最后进行归一化得到较为纯净的EMG信号。
首先,神经动力学模型定义为动作电位产生的神经抽搐,该过程可表示为2阶微分方程。一般可应用滑动标准差来评价神经活跃度大小,设采集N个EMG信号值,xi为第i个肌电值,求解EMG积分肌电均值积分,以及神经活跃度u(t),如式(1)所示。
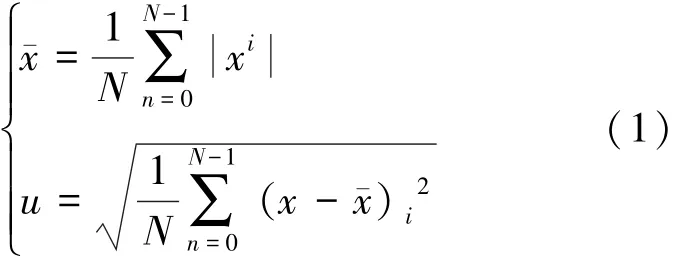
由于个体差异的存在,记录每位被试者上肢肌群自然状态下的静息EMG信号x0,作为肌肉静息状态下的神经活跃度值u0。
肌肉活跃度为神经电刺激下肌肉的反应大小。由神经活跃度得到肌肉活跃度的非线性关系为式(2)。

式中,A表示非线性程度,当A=0时,神经活跃度和肌肉活跃度为线性关系。A越小,a在u激增时不会变得过大,保证肌力特征值平滑。
3.2 肌肉发力动力学建模
人体肌肉-肌腱一般用HILL模型处理[14],肌肉发力等效为肌肉活跃度为变量的弹簧-阻尼模型,受肌肉长度、收缩速度与肌肉活跃度影响。测试肌肉得到最大发力Fmax、肌肉最大形变长度和最大速度,然后对长度和速度归一化为l和,可根据式(3)得到肌肉发力大小。

对于航天员作业,其关节运动速度很慢,因此忽略肌肉长度变化速度对肌肉力量的影响。肌肉发力为肌肉纤维的主动发力与肌肉-肌腱弹性力2部分的合力,分别为Fa和Fp,对该2种力分别建模可得式(4)。
由式(4)可知,当肌肉长度一定,肌肉活跃度与肌肉力量呈线性关系,截距即为肌肉弹性力,斜率为与肌肉纤维主动发力相关的系数。
3.3 关节运动学模型
关节运动过程中,肘关节角q变化引起肌肉-肌腱单元长度变化,由虚功原理计算所有相关肌肉-肌腱在关节处产生的力矩T,即对肘关节来说,肱二头肌和肱三头肌产生的关节力矩如式(5)所示。

肌肉力及其对关节的力臂是关节角度的函数。同时,肌力力臂为肌肉长度关于关节角度的微分,如式(6)所示。

对于力臂r1和r2,实际中很难测量,可采用数据拟合的方法逼近最优值,对不同被试者进行标定。设关节力矩测试值T′,则采用优化算法,如式(7)所示。
综合上述分析,由EMG信号x反馈得肘关节力矩T的过程,可得到式(8)所示的建模方法。
式中,参数A的取值范围为-3<A<0,k和m为不同肌肉的发力方程可调参数,r1和r2可通过标定实验进行优化选择。
4 控制系统设计
模拟航天服关节助力系统控制将采用基于负载和阻力模型前馈与基于肌肉活跃度的反馈控制相结合的方法。
模拟航天服肘关节助力系统的关节阻尼采用自研的转动式阻尼模拟器模拟,根据阻尼特性得到阻尼-角度模型,由角度得出对应的关节阻力矩。对测试数据进行线性拟合,设斜率A和截距B,得该阻尼模拟器的角度-力矩关系如式(9)所示。

根据上述自研的阻尼模拟器参数模型,得到关节阻力与运动角度的关系,进行关节阻力补偿控制。此外,对模拟航天服肘关节助力系统的质量特性进行分析,得到系统结构重量在肘关节的载荷,即由助力系统发力来承担系统重量。
对于肘关节运动来说,其对应的肌群为肱二头肌和肱三头肌,由2组肌肉的EMG信号分析肘关节的肌肉发力输出意图,研究基于肌电反馈的控制方案,而航天服本身特性并不会影响肌电控制模型。
基于第3节对EMG信号的建模分析,建立由EMG原始信号到关节力矩的映射模型。选择20~100个肌电信号为循环肌电信号数组,进行滑动式特征值计算,以得到较为平滑显著的运动意图信号。首先对肌电信号进行高通滤波,截止频率设置为10 Hz,再对信号进行全波整流。由于肌肉发力相关的肌电信号频率基本在100 Hz以下,因此可利用低通滤波滤除高频干扰信号。最后,在每次实验前记录肌肉静息下的肌电特征,并测试最大EMG值,对EMG值做归一化。
设计基于EMG的肌力特征辨识,根据设定的肌力力臂长度,计算肱二头肌和肱三头肌在肘关节产生的力矩,加上关节阻尼模型和动力学模型解算的部分前馈补偿力矩,作为控制策略输出的目标关节力矩。肱二头肌和肱三头肌产生的EMG信号建模分析可得到在肘关节处方向相反的2个力矩。肘关节屈时,肱二头肌激活度信号增强,肱三头肌相对变弱,助力系统给予肘关节屈运动助力;肘关节伸时,情况相反。基于EMG反馈的模拟航天服肘关节助力系统控制策略如图4所示。

图4 模拟航天服肘关节助力控制策略Fig.4 Control scheme of simulated spacesuit elbow joint assistive system
5 肘关节助力实验
模拟航天服关节助力实验如图5所示,被试者为身高180 cm、体重82 kg的健康男性。系统留有上肢穿戴的接口,通过带粘扣的绑带固定于被试者左上肢或者右上肢的上臂和前臂,人体肘关节轴线对准助力系统转动关节。被试者上臂的肘关节运动相关肌群需要贴贴片电极,在绑带预留孔位,并防止绑带滑动对电极的影响。微伏级的EMG极易受运动伪迹干扰,实验中将原始信号线固定于绑带用以减小晃动量,且应远离电磁信号源等。实验使用3 M肌电电极采集肱二头肌和肱三头肌肌电,腕部骨凸起处贴1片电极作为EMG参考地。实验所用的动作为:肘关节屈伸运动,肘关节屈时,肱二头肌EMG信号相对肱三头肌增强;肘关节伸时,情况相反。本实验根据采集到的两肌肉活跃度信息,得到肘关节的助力需求,然后控制电机,让肘关节助力机构提供与该发力需求相匹配的力输出。

图5 肘关节助力实验Fig.5 The elbow joint assistance experiment
5.1 基于肌肉神经活跃度反馈的关节控制验证
实验中,被试者穿戴助力系统持续屈伸肘关节,做简单往复运动,采集肘关节角度、肱二头肌和肱三头肌肌电信号(EMG1/EMG2),并实时记录关节力矩输出值。肘关节运动角度如图6所示,从图中可得,肘关节运动范围0°~30°,每个周期大概为1.2 s。整流、滤波等处理后的EMG信号如图7(a)所示,肱二头肌EMG信号明显强于肱三头肌EMG。然后实时计算两肌肉的活跃度变化情况如图7(b)所示,肘关节每个运动周期都对应1组肌电信号的波峰信号。
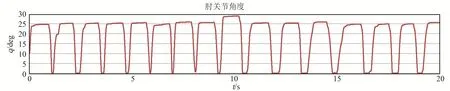
图6 肘关节助力系统的运动角度Fig.6 The joint angle of elbow joint assistive system
将EMG反馈的肌力特征信号作为输入通过控制算法得到的肘关节力矩输出,如图8所示。为保护被试者免受EMG信号过度波动的伤害,设置输出力矩值上限为10 Nm。EMG显示的肌肉活跃度与系统关节力矩输出基本同步,说明助力系统能够满足实时性要求,但作用于肘关节助力机构后,由于惯量的存在,角度变化相对肌肉活跃度是有滞后的。
5.2 肘关节助力工效验证
为评价基于肌肉神经活跃度反馈的肘关节助力系统有效性,实验中将电机是否加电驱动产生助力作为对比条件,对穿戴助力系统后被试者肘部屈伸运动EMG对应的肌力特征作为对比结果,如图9所示。
如图9(a)所示,无助力情况下,得到肱二头肌肌力特征均值1.297×103N,肱三头肌肌力特征均值5.76×102N,前者显著大于后者,原因是被试者完全依赖肱二头肌克服外部载荷。如图9(b)所示,有助力情况下,得到肱二头肌肌力特征均值4.54×102N,肱三头肌肌力特征均值4.00×102N,前者与后者相近,原因是助力系统为被试者提供了克服外部载荷的力矩。对比有/无助力情况下被试者的肌力特征变化可发现:有助力情况下,被试者肱二头肌和肱三头肌肌力特征值分别下降65.0%和30.5%,即肌肉发力需求显著下降,助力效果较为明显。然而,由于EMG信号显然不够平滑,对运动控制稳定性有负面影响。综上,基于EMG肌力反馈的肘关节助力系统能够显著降低人体关节肌肉发力需求,助力实时性能够满足关节运动的要求。

图7 肱二头肌和肱三头肌的肌肉Fig.7 Muscle activation of biceps and triceps

图8 肘关节助力系统的输出力矩Fig.8 The joint torque of elbow joint assistive system
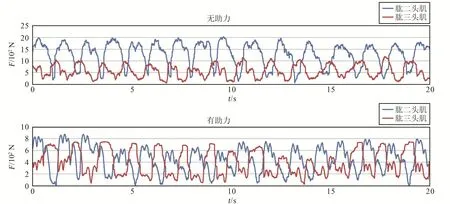
图9 有/无助力情况下被试者的肌力特征值对比Fig.9 Comparison of muscle force of the subject with/without assistance
6 结论
面向航天员舱外作业能力增强技术需求,提出了一种基于肌肉神经活跃度反馈的关节助力控制,利用模拟航天服关节特性的关节助力系统进行了技术验证。对于着航天服的航天员助力系统,相比基于运动/力信息的控制,该种基于EMG反馈肌力特征的意图跟随控制方法实时性好,且可解决航天服对人与助力系统的物理隔离问题。