汽车主动悬架多目标最优鲁棒控制LMI方法研究
2019-08-24段建民黄小龙
段建民,黄小龙
(北京工业大学信息学部,北京 100124)
0 引言
1/4车辆悬架模型无法反映前后悬架之间的联动关系。而在半车悬架协同控制中,要求反映行驶平顺性的垂直加速度和俯仰角加速度值小、悬架的动行程只能在给定的行程内变化、车轮和路面间的动位移较小,使车轮和路面具有良好的附着效果。但这三个评价标准在客观上存在矛盾[1]。为解决此问题:文献[2]利用模糊PID控制车身加速度和悬架动挠度,未对其他性能作约束,鲁棒性能差;在其他控制方法中,神经网络控制系统的学习过程较长、适应性和实时性较差,线性二次高斯 (linear quadratic Gaussian,LQG)控制很难选择合适的加权值,将其性能限制在范围内[3]。
刘树博[4]利用差分进化和矩阵不等式(differential evolution and linear matrix inequality,DELMI)算法对主动悬架单目标输出反馈控制进行研究。ZHENG等[5]研究具有执行器容错的1/4主动悬架系统有限频率控制问题。LI等[6]研究1/4悬架鲁棒反馈控制器的设计问题。WANG等[7]针对全车主动悬架系统,在有限频率范围内,给出了动态输出反馈控制器设计方法。
针对汽车主动悬架系统中性能指标存在相互制约的特性,以4自由度(degree of freedom,DOF)半车电液主动悬架模型作为研究对象,设计出一种基于矩阵不等式(linear matrix inequality,LMI)的多目标最优鲁棒控制器。该控制方法不仅考虑系统鲁棒稳定性的问题,而且综合考虑舒适性、悬架行程约束和接地性,对这些性能指标进行优化约束。仿真结果表明,该控制方案与被动悬架和单目标鲁棒状态反馈控制相比,在舒适性与操纵稳定性方面得到改进。
1 运动方程
半车四自由度主动悬架动力学模型如图1所示。半车身质量和俯仰运动的转动惯量分别用m2、Iφ表示;前、后轮的非簧载质量分别用m1f、m1r表示;前悬架产生的弹性力和阻尼力分别由ksf、csf表示;后悬架产生的弹性力和阻尼力分别由ksr、csr表示;前、后轮胎产生的弹性力分别为ktf、ktr;车身绕y轴俯仰角为φ;前、后簧下质量位移分别由zuf、zur表示;前、后路面扰动位移输入分别由zrf、zrr表示;前、后悬架组件纵向距离到车身质心的距离分别由a、b表示;前、后悬架控制力分别由uf、ur表示。
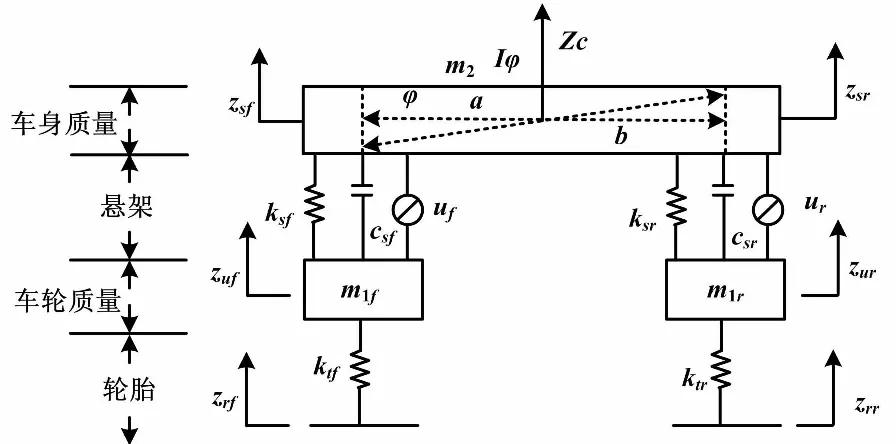
图1 半车4自由度主动悬架动力学模型Fig.1 The 1/2 vehicle active suspension dynamic model with 4 DOF
根据牛顿第二定律,可获得半车悬架系统动态微分方程如下:
(1)
当俯仰角φ较小时,可以近似得到:
zsf(t)=zc(t)-aφ(t)
(2)
zsr(t)=zc(t)+bφ(t)
(3)
对式(1)~式(3)作变换,可以得到:
(4)



根据式(1)和式(4),可得如下的状态空间形式:
(5)
式中:x=[x1(t)x2(t)x3(t)x4(t)x5(t)
x6(t)x7(t)x8(t)]T。
u(t)=[uf(t)ur(t)]T
在半车主动悬架控制器设计中,需要考虑如下的性能要求。

(6)
②悬架行程约束:悬架行程在安全的行程范围内满足式(7)。
(7)
式中:Zf,max、Zrmax分别为前、后悬架最大行程值。
③接地性:实现操纵稳定性需满足式(8)。
(8)
式中:Ff、Fr分别为前、后轮胎的静载。
Fr(a+b)=m2ga+m1rg(a+b)
Ff+Fr=(m2+m1f+m1r)g
定义第二组控制输出:
(9)
式(9)包含着对式(7)和式 (8)的性能约束。这时可以得到含外部扰动输入的半车主动悬架系统的状态空间方程式:
(10)
假设主动悬架系统所有状态皆可被在线测量,则设计控制律为:
u(t)=Kx(t)
(11)
式中:K为状态反馈增益系数矩阵。
由此可以得到如下的闭环系统:
(12)
系统是渐近稳定的,使闭环系统内稳定且使传递函数Tz1w的范数H∞最小化,即:
‖Tz1w(s)‖∞=‖(C1+D12K)[sI-(A+
B2K)]-1B1‖∞<γ
2 改进型多目标优化控制算法设计
对于主动电控悬架系统,根据性能指标,半车全状态多目标最优H∞控制器的的状态反馈增益系数可通过以下定理求取。
(13)
(14)
则存在一个状态反馈控制器(7)。
①在没有扰动的情况下,闭环系统 (12)是渐近稳定的。
②在零初始状态下,闭环系统(12)满足:
‖G(jω)‖∞<γ
γ的值越小,系统对外部扰动能力越强,系统的性能越好。
最终,求出增益矩阵:
证明:根据界实定理第四形式可知,闭环系统内稳定且具有H∞性能γ,当且仅当存在一个正定P>0,使得:
(15)
(16)
(17)

考虑控制输入和约束输出如下:

所以:
式中:λmax{*}为矩阵的最大特征值,i=1,2,…,6。

可得不等式(14),证明结束。
这样,主动悬架系统(10)的全状态多目标最优H∞控制器可以通过求解以下具有LMI约束和目标函数的凸优化问题得到:
3 半车全状态多目标最优H∞控制仿真分析
为验证所提出优化控制算法的效果,仿真中假设平整路面上有一个包块,作为路面扰动脉冲输入。路面的时域模型可表达为:
式中:zr(t)为路面垂向位移,m;h和l分别表示包块的高度和宽度,m;v0为恒定的车辆前进速度,m/s。
经试验仿真,发现控制器设计参数ρ为0.05时,控制效果不显著。当该值越小,效果越明显。本文选ρ为0.025。
表1为半车主动悬架的模型参数。
表1 模型参数Tab.1 Model parameters
①根据文献 [4] 方法,设计主动悬架H∞最优控制器。此方法为单目标鲁棒状态反馈控制,求出的全状态最优控制反馈增益矩阵为:
②本文所提控制算法。同样,根据表1车辆参数,对上述8个矩阵不等式进行求解,其中最优值γ使用mincx求解器得到为4.919,最终解出全状态最优控制反馈增益矩阵为:
性能指标均方根对比如表2所示。

表2 性能指标均方根对比Tab.2 Comparison of performance index RMS
为了研究该方法的可行性,对半车被动悬架进行对比。在时域内,比较垂直加速度、俯仰角加速度、悬架动行程、控制执行力和轮胎动位移动态特性;在频域内,比较输入输出频率特性[10]。
时域响应曲线如图2所示。图2(a)和图2(b)是车身垂直加速度和俯仰角加速度的时域响应图,通过与被动悬架作比较,该方法可以同时降低垂直加速度和俯仰角加速度的值,实现扰动抑制,改善车辆行驶的舒适性。图2(c)和图2(d)是前、后悬架动行程的时域响应图,通过与被动悬架作比较,悬架的行程能够约束在最大行程之内,避免冲击限位装置。图2(e)和图2(f)为主动悬架主动控制力的时域响应图,执行机构输出控制力限制在设计值范围内,避免液压装置输出饱和。图2(g)和图2(h)为主动悬架前轮和后轮动位移的时域响应图,在前后轮经过凸包时,该动载和静载之比都小于1,可保证轮胎的接地性,实现车辆行驶的安全性。


图2 时域响应曲线Fig.2 Time domain response curves
被动悬架和本文主动悬架控制方法频率响应曲线如图3所示。

图3 频率响应曲线Fig.3 Frequency responses curves
4 结束语
本文以4自由度半车电液主动悬架作为控制对象,以优化舒适性和操纵稳定性为目标,提出一种LMI算法。设计了全状态反馈控制律,并进行时域和频域仿真。本文得出如下结论。
①在时域进行仿真,验证本文控制方法的车身垂直加速度和俯仰加速度的值与被动悬架相比明显降低,改善了车辆行驶的舒服性;克服了文献 [4]方法的缺陷,使俯仰角加速度得到降低,对垂直加速度有明显改善。
②通过对性能指标变量进行约束,解决了在设计控制系统时如何在舒适性与操纵稳定性之间进行合理折衷的问题,确保轮胎向整车提供足够的侧向力和纵向力,实现前后悬架协同控制。
③在建立的4自由度半车车模型中,对频率响应进行分析,验证了该方法能有效抑制有限带宽范围内的车身垂直加速度和俯仰加速度。
