煤矿短壁开采用转载破碎机电气系统设计
2019-08-22刘晋宇
刘晋宇
(同煤集团 白洞煤业有限责任公司, 山西 大同 037029)
0 引言
在自动化生产过程中,转载破碎机位于掘锚机/掘进机后方,主要作用是将采掘的大块煤矿进行破碎,并转运至带式输送机。转载破碎机随着掘锚机/掘进机前进而前进,紧跟掘锚机/掘进机工作。在实际的煤矿生产过程中,转载破碎机的工作状态稳定性较差,如:煤块较大时,可能会使转载破碎机的刮板发生堵转,形成堆煤现象;与带式输送机配合不协调时,会出现漏煤现象。转载破碎机在与掘锚机/掘进机配合前进时,容易出现过快或过慢的情况:速度过快时,转载破碎机与掘锚机/掘进机会形成碰撞,损伤机器的机械结构;过慢时,掘锚机/掘进机采掘的煤矿无法转运到转载破碎机的料斗内,降低生产效率[1-2]。通过分析研究,设计了转载破碎机的电气系统,解决了生产中的实际问题,取得了较好的效果。
1 总体设计方案
转载破碎机电气系统的设计架构如图1所示。该电气系统由3部分组成:转载破碎机主电控箱、外围电气元器件、监控平台。转载破碎机主电控箱是电气系统的控制核心,其作用是将外部电源交流1 140 V电源经主电控箱的进线装置引入,经隔离开关、熔断器保护后,由变压器转换出AC 220 V、AC 127 V等不同等级的电源供弱电部分使用。经熔断器后,电流经过传感器检测后接入泵站电动机、破碎电动机,驱动电动机转动。弱电部分包括PLC控制器以扩展模块,还包括模拟量隔离栅、语音报警隔离删、漏电保护装置、模拟量放大器、继电器、急停按钮、启动按钮等。电气系统的外围电气元器件主要包括变频器、电动机、遥控接收器、遥控发射器、荧光灯、照明灯、传感器、瓦斯断电仪等。其中最为主要的是变频器,PLC控制器与变频器之间采用CAN通信的方式实现控制和数据传输。遥控装置中的遥控接收器和遥控发射器之间采用Modbus通信实现控制[3-5]。电气系统的监控平台是转载破碎机运行时实时工况的显示平台,也是故障监测平台。监控平台与主电控箱之间通过CAN通信方式实现数据的传送。

图1 转载破碎机电气系统设计架构
2 硬件设计
2.1 主电控箱内部电气设计
转载破碎机电气系统硬件主电控箱内部电气设计分为强电部分和弱点部分。强电部分的电气原理如图2所示,1 140 V的三相交流电通过主电控箱的进线装置引入主电控箱,经隔离开关、熔断器后,分别经电流互感器接入泵站电动机和破碎电动机。三相交流电经熔断器后,接入变压器,输出交流220 V、交流127 V以及直流24 V 3种电源供主电控箱内部使用。
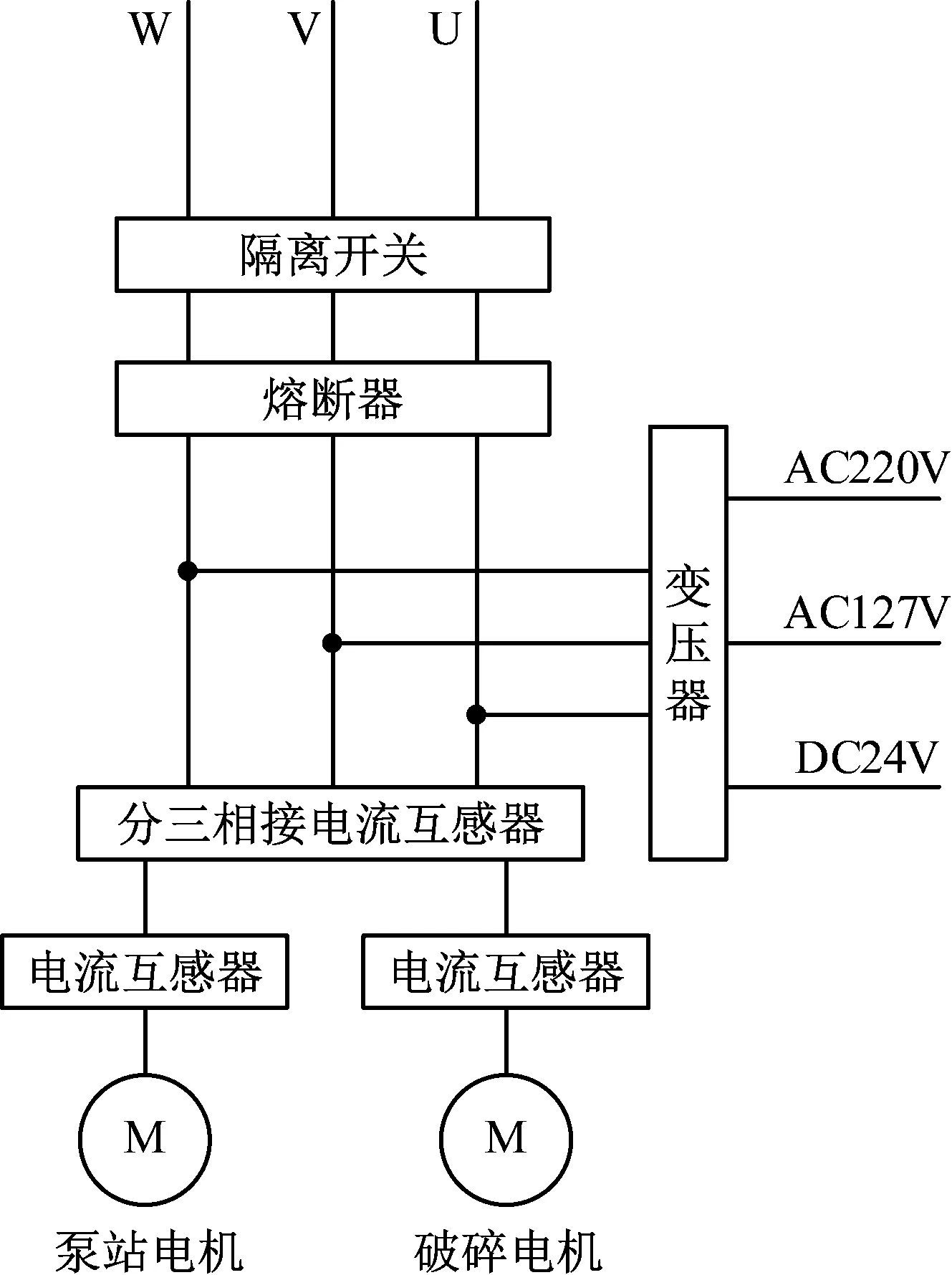
图2 主电控箱内部强电部分电气原理
主电控箱内部设计的弱电部分电气原理如图3所示。PLC主控制器及其扩展模块是整个控制系统的核心,数字量输入信号包括:泵站电动机的起停、破碎电动机的起停、电控箱急停、左侧急停、右侧急停、遥控急停、漏电闭锁、泵站电动机过热、破碎电动机过热、AC127 V漏电、DC24 V漏电、泵站电动机自保、破碎电动机自保、瓦斯断电、单机、联动,通过数字量输入模块1~3接入PLC控制器。数字量输出信号包括:泵站启动报警、破碎启动报警、破碎行走报警、破碎马达报警、泵站电动机起动、破碎电动机起动、泵站回路漏检、破碎回路漏检、荧光灯、前照明灯、后照明灯、履带行走、掘进机闭锁及运输机功能,通过数字量输出模块1~3引出,并经一对一的继电器输出到各电气元件以及电磁阀。模拟量输入信号主要包括油温、油位、压力、倾角信号,原始信号经由隔离栅后输入到PLC控制器的对应模拟信号输入端。另外,系统的模拟信号还包括泵站电动机和破碎电动机的电流传感器信号,一共2组,6个模拟量信号。模拟量输出信号包括左履带行走、右履带行走2个,经由模拟量放大器后接入电磁阀,控制转载破碎机行走。在行走过程中,引入变频调速装置,灵活控制转载破碎机的行走速度。在弱电系统中,PLC控制器与变频器之间、PLC与HMI人机界面之间场采用CAN通信方式实现数据传送。该弱电系统还包括:电源转换模块,如AC220V转DC24V、AC220V转DC12V;漏电保护装置,对泵站电动机和破碎电动机进行漏检;电控箱急停按钮、泵电动机起动按钮、破碎电动机起停按钮以及单机、联动转换开关。
2.2 主电控箱外围电气设计
转载破碎机电气系统硬件主电控箱外围电气设计如图4所示。泵站电动机用于给转载破碎机中的液压系统提供动力源,破碎电动机用于给转载破碎机中的刮板链条提供动力源。从主电控箱的进线装置中引出控制转载破碎机动作的信号线,经矿用隔爆型低压接线盒分流后,接入运输机电动机。信号线用于控制转载破碎机各个动作的电磁阀。照明设备包括:矿用隔爆型支架荧光灯,用于部分区域照明;矿用隔爆型照明信号灯,前照明信号灯用于前方照明,后照明信号灯用于后方照明。外围按钮包括:矿用隔爆型急停按钮,分为左急停和右急停,用于非正常状态下的快速停机;矿用隔爆型控制按钮,用于起动、停止泵站电动机和破碎电动机。由于该转载破碎机具有遥控控制模式,故采用矿用隔爆兼本质安全型遥控接收器和接收机用于遥控控制。传感器包括:矿用本质安全型插入式温度传感器,用于测量液压油的温度;矿用本质安全型液位传感器,用于测;量液压油的液位;矿用本质安全型压力传感器,用于测量水压压力。接线时需要增加本质安全型电路接线盒。转载破碎机采用履带式行走,外围电气设计中配置有左履带电磁阀和右履带电磁阀。另外,系统还包括矿用本质安全型无线摄像仪,用于监控破碎机前方的工况;矿用本质安全型组合扩音电话,用于破碎机启动时发出语音报警;矿用车载式瓦斯断电仪,用于监测煤巷的瓦斯浓度。
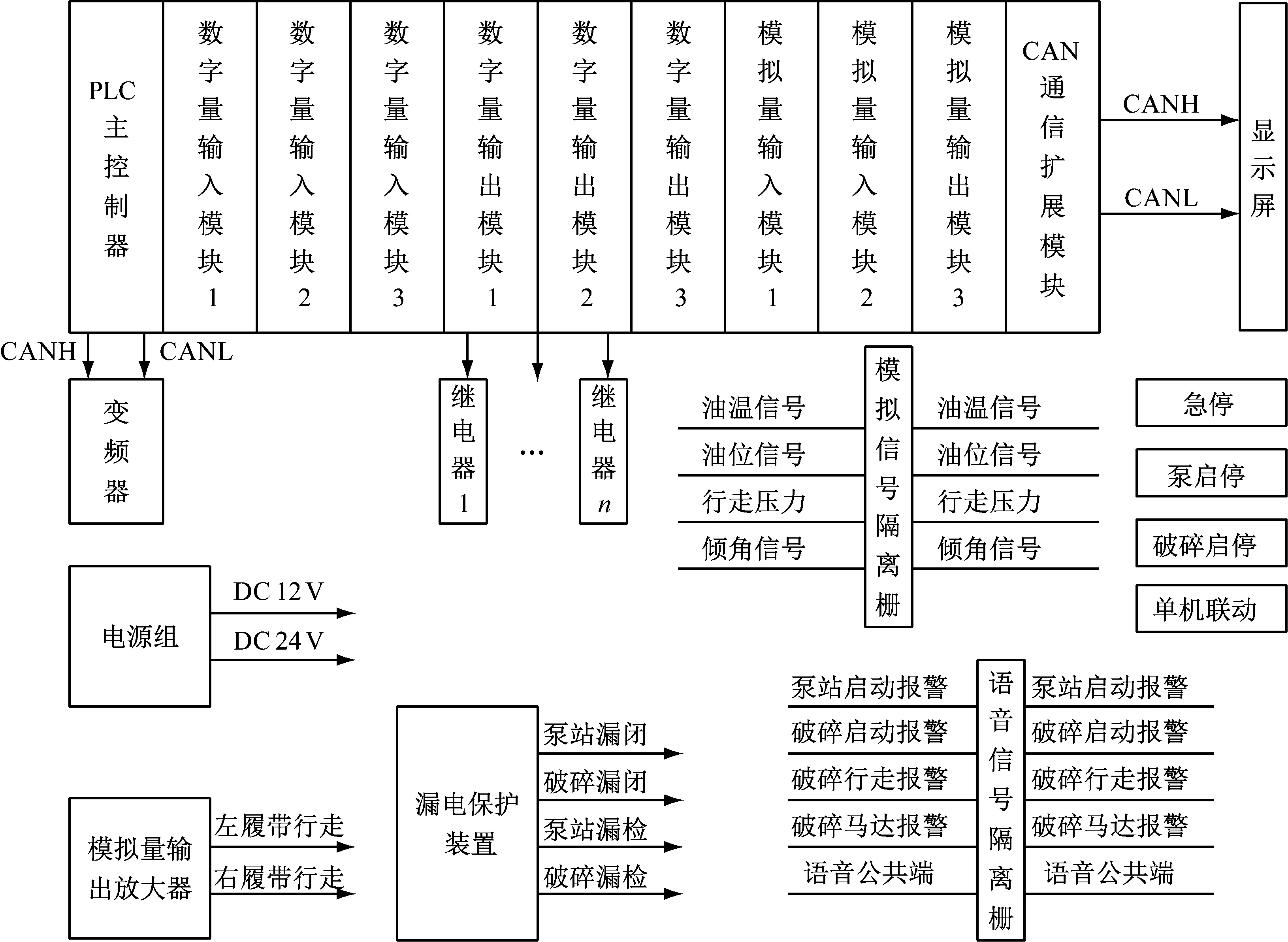
图3 主电控箱内部弱电部分电气原理
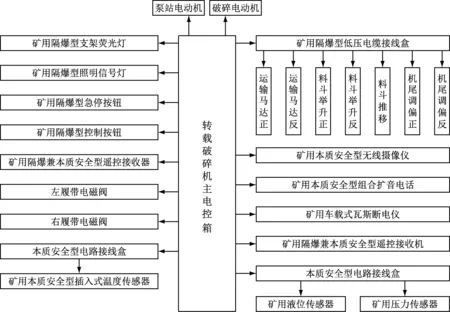
图4 主电控箱外围电气设计架构
3 软件设计
转载破碎机电气系统的软件由PLC程序实现,软件系统流程如图5所示。初始化程序完成对程序中用到的变量进行初始化。与遥控接收机通信完成PLC控制器与遥控接收机之间的Modbus通信并进行数据传输,以实现遥控控制转载破碎机的目的。泵电动机/破碎电动机保护完成对泵电动机和破碎电动机的保护,包括对过载、过流、过热、缺相、断相、两相粘连以及传感器故障等异常状态的检测。泵电动机起动过程完成对泵站电动机的起动,程序需要判断泵站电动机的起动条件,只有在起动条件满足的情况下,才能起动泵站电动机。破碎电动机起动过程完成对破碎电动机的起动,程序需要判断破碎电动机的起动条件,只有在起动条件满足的情况下,才能起动破碎电动机。模拟量处理子过程完成对系统中模拟量的处理,即对油温传感器、油位传感器、压力传感器模拟量的获取,数字量的转换。遥控器处理子过程完成对转载破碎机遥控操作,动作包括急停、行走、运输机动作、料斗动作、机尾动作等。与变频器通信过程完成PLC控制器与变频器的CAN通信,进而对破碎电动机进行转速控制。显示屏处理子过程完成转载破碎机电气系统监控平台的实现。系统时间处理过程完成对转载破碎机运行时间的累计操作。
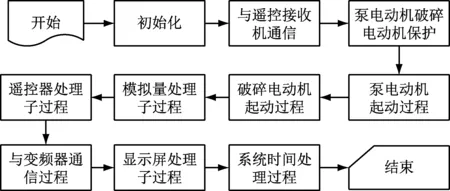
图5 软件系统流程
4 结论
转载破碎机是煤矿短壁开采中重要的机械设备之一,设计的电气系统解决了堵转、堆煤、漏煤、与带式输送机配合不协调、与掘进机配合不协调等工作状态稳定性差等问题,提高了转载破碎机的开机率。在实际的应用中,该转载破碎机运行安全、稳定,满足了生产要求。
