煤矿井下探测搜救机器人地形感知系统及路径规划方法研究*
2019-08-14卢万杰赵洪瑞
卢万杰,付 华,赵洪瑞
(1.辽宁工程技术大学机械工程学院,辽宁 阜新 123000;2.辽宁工程技术大学电气工程学院,辽宁 葫芦岛 125000; 3.煤科集团沈阳研究院有限公司,沈阳 110000)
煤矿搜救机器人作为煤矿救灾的器械而被发明出来,需要解决的核心问题是它的导航技术。由于,矿灾发生后会造成巷顶冒落、机械设备倾倒和巷道漏水等各种复杂工况,对就业机器人的作业环境的包容性提出更大的挑战。在复杂的地面作业环境的条件限制下,救灾机器人需要具有较强的复杂地形适应能力、较强的越障性能、较好系统可靠性、更持久的工作电源、较高的智能识别系统精度和智能路径规划性能。故救灾机器人的导航技术的研究是极其重要的,它包含对运动结构的控制、环境识别的精度及智能规划路径等众多研究问题。
煤矿搜救机器人自适应智能导航技术是众多搜救机器人技术中的最关键一项,该项技术的成功研究是煤矿搜救机器人推广应用的前提条件。
文献[1-4]中都运用Doucet 等学者研究的SLAM 方法,该种方法是以ao-Black wellized 粒子滤波器RBPF为基础,他可以高精度的建立移动机器人的位姿与环境间的联系。文献[5-6]中都以激光扫描仪与单目视觉相融合的SLAM算法为研究对象,对周围工作环境特征进行识别,形成新的环境坐标,减少了数据的不准确性,但由于数据计算量较大,在时间上会有一定延误。文献[7]首次提出RBPF 算法,它是以退火参数优化理论为基础,此种方法具有减少所需粒子数但不减少粒子的种类的优势。文献[8]对计算提议分布过程进行研究,对过程中的里程计信息与激光采集的距离信息进行融合,通过验证得知,它可以在很大程度上减少粒子数但同时能保证预测阶段机器人位姿的预测精度。
以上文献所述的机器人导航系统基本是采用激光扫描仪或视觉传感器实现未知环境内的地形识别,所观察的维度单一,如果观测目标是近距离障碍物,则无法对远距离环境内的障碍物进行观测,容易使机器人走入“死胡同”,如果观测目标是远距离环境,则对近距离障碍物的观测盲区有可能会使机器人驶入深沟等无法逾越的障碍物中。针对上述问题,本文对煤矿井下探测搜救机器人地形感知系统进行研究,使用远近感知系统数据融合,提高机器人避障能力。并研究基于地形感知信息的机器人路径规划方法。

图1 机器人地形感知系统硬件框架
1 机器人地形感知系统组成
煤矿井下探测搜救机器人的地形感知系统硬件框架如图1所示。系统硬件主要由中央计算机和各种传感器组成[9-10]。其中传感器主要包括用于机器定位的编码器、用于机器人姿态检测的倾角传感器、用于远距离地形感知的激光扫描仪以及用于近距离地形感知的Kinect视觉相机等组成。
Kinect作为一种典型的多传感器融合系统,它主要由三个摄像头构成。其中中间部分的摄像头采用的是RGB摄像头,它的功用主要体现在彩色图像的获得。两侧的镜头为红外线发射器和红外线摄像头,两者功用相辅相成,共同组成3D结构光深度感应器,它的主要功用为采集深度信息[11]。
系统采集各类传感器数据,由机器定位的编码器、用于机器人姿态检测的倾角传感器采集的数据确定机器人的位置和姿态,由远距离地形感知的激光扫描仪采集的二维点云数据建立未知环境下的地图构建。由近距离地形感知的Kinect相机采集的地形深度信息建立栅格地图。机器人路径规划决策系统根据软件构建的地图信息和栅格地图信息以及机器人机身运动学模型等进行路径规划。本文主要针对地形感知系统进行研究,对于路径规划决策系统将在今后进一步进行研究。
2 地形感知系统数学模型
2.1 机器人运动学模型
建立机器人坐标系如图2所示。其中{ow}为世界坐标系;{ob}为机器人机体坐标系;{os}为机器人远距离测距激光扫描仪坐标系;{oc}为机器人近距离地形识别Kinect视觉相机坐标系。

图2 机器人坐标系


式中:xg为机器人相对于世界坐标系x轴的位移变化;yg为机器人相对于世界坐标系y轴的位移变化;zg为机器人相对于世界坐标系z轴的位移变化;α是机器人航向角度;β为机器人的翻滚角度;γ为机器人的俯仰角度[12]。
(3)
综上可得机器人在世界坐标系中的地形深度信息表示方法:
2.2 近距离感知系统模型
Kinect 在实质上是由两部分构成:RGB摄像头和红外摄像头,两者间相互配合共同构成3D结构光深度传感器,可实现彩色图像与深度图像的同步 收集。
通过RGB摄像头得到的图像中每一个像素点都可在深度图像中寻找到像素点与之对应,从而可获得与之相对应的深度值。借助于摄像机投影模型和相对应的物理参数,可以把二维图像像素坐标点进行转换,变为三维坐标点,可直观获取观测信息,直接构建三维点云图像。坐标转换公式如下:
X=(u-u0)Z/fxY=(v-v0)Z/fyZ=d/s
(5)
上式中以信息(u,v)与深度信息d为自变量,通过构建数学模型推导出因变量空间坐标(X,Y,Z)。s为尺度缩放因子,参数已知。u0,v0,fx,fy为通过实验确定的参数数值。Z为距离参数,和Kinect视觉系统中的的距离信息意义相同[13]。

图3 Kinect相机图像采集流程图
以PCLPCL(Point Cloud Library)为基础,应用像素遍方法,并依据上述模型中的深度信息和位置颜色信息,实现观测信息的采集与云图像的构建[14]。具体流程如图3所示。
由于Kinect中得到的深度数据误差和深度距离具有成正比的特性,为保证其检测精度,故对观测距离设置距离上限阈值Dmax,对于超过上限值的数据进行剔除。其中上限阈值可依据具体问题进行综合选取。
2.3 地形构建
构造环境模型是移动机器人能实现智能化适应动作的前提条件,应用普通方法对环境地图进行构建并使之服务于机器人是不现实的。传统的室内环境具有以下三种特点:垂直结构多、高度结构化以及包含多种线性构造(线、面的结构特征显著)。正是由于这种特性,故可采用二维栅格地图方法对室内场景建模。但由于室外环境较复杂,随机条件太多,采用单一的、少量的几何元素对环境建模,极不现实,故简单的二维栅格地图使用推广就受到限制。此时采用2.5维栅格方法可完全解决这一问题,通过该种方法可建立海拔信息地图,与普通地图相比,此种地图信息更加丰富,但与传统的三维地图相比,建模难度相对简单,故综合参考,在不包含空间运动的机器人中,采用2.5维栅格地图在存储和计算量方面均是最适用的。
2.5维栅格地图与传统意义上的二维、三维地图有所区别,它是以二维地图为基础,在二维地图上施加了单元信息,例如:高程差、坡度、纹理、颜色等评价准则信息。其中高程差、坡度信息的确定是由深度数据进行计算得到的,纹理、颜色信息主要通过特征提取来确定。这些评价准则的确定是几种特征在经过多次训练后获得的。
地形信息的表示方法采用的是数字高程模型DEM,它是由规则的栅格组成,其中每个栅格中都存有与之相对应栅格区域的平均高程[15]。其中,以DEM为基础对栅格进行危险等级值D(D∈{[0,1],2})划分。其中该数值的大小与地形的复杂程度息息相关。当D取0时,表示地势平坦;当D取1时,表示地势相对复杂,难通过;当D取0时,表示地势复杂,不可通过,此时机器人需躲避;D的取值决定因素为地形坡度S(打滑约束)、起伏度H(步高及障碍边缘约束)及粗糙度R(机体稳定约束)三种,具体数值采用3×3 的DEM栅格进行计算获得。采用文献[16-17]中提出的地形信息计算方法:
H=max{ei-e0},i=0,1,2,…,7
(6)
式中:Swe为东西方向的坡度;Ssn为南北方向坡度;L为栅格边长。
2.4 机器人感知系统实验
本文使用搭建的煤矿井下探测搜救机器人平台带有思岚RPLIDAR-A1型二维激光扫描仪,扫描距离为0.15 m~12 m,测量采样频率为≥4 000 Hz。搭载配备 Kinect V2相机,里程计以及支持串口连接的控制计算机等。计算机配置为英特尔I5-3317U,8G内存,128 G固态硬盘,计算机的操作系统为Ubuntu14.04 LTS 版本,并且计算机系统中搭载了Indigo版本的ROS系统。机器人机载计算机通过54 M带宽的802.11 g无线通讯协议与远程的计算机通信,远程计算机实验同样的Ubuntu14.04 LTS版本系统和Indigo版本的ROS系统,使用ROS系统的RVIZ图形化工具显示出机器人建立的地图等图形信息。使用本文搭建的煤矿井下探测搜救机器人实验平台进行地形感知实验。选取台阶和野外地形对本文研究的地形感知系统进行实验研究。采集现场、处理后的灰度图和深度图以及由式(6)~式(8)得到的地形信息如图4和图5所示。
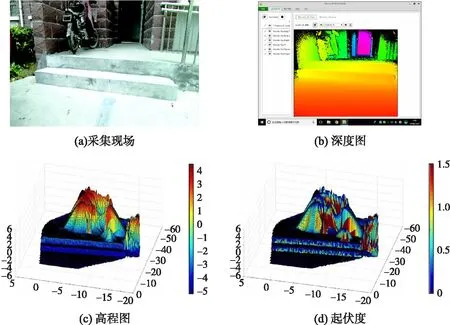
图4 台阶地形感知实验

图5 野外地形感知实验
图4和图5得到的实验地形的高程图和起伏度与实际地形信息相符,本文通过多个室内及野外环境的测试,验证了本文研究的地形感知系统得到的地形信息的可行性。实验结果表明本文使用的计算方法可减小坡面对粗糙度的影响,可较好地反映地形粗糙度及高程信息。可利用本文研究的地形感知系统得到的地形信息为机器人的路径规划提高较好的数据支持。

图6 巡检机器人路径规划流程
3 机器人路径规划研究
3.1 机器人运动路径规划流程
移动机器人在执行探测任务的时候,往往需要对探测区域进行数据采集、数据分析以及放置探测仪器等,为了使机器人能够自主且准确的完成探测任务就需要考虑机器人所处的三维崎岖环境对机器人的运动进行规划。崎岖地面上移动机器人运动规划是机器人自主导航的基础,也是当前机器人领域研究的热点之一。其关键技术包括崎岖地面环境建模、运动规划和评估,以及如何有效的实现已规划路径的运动控制。煤矿井下巡检机器人需要通过崎岖不平的复杂路面,过去人们研究机器人路径规划时往往将机器人看作一个质点,但是机器人在崎岖不平路面行走时,4个轮子着地点的不同会影响机器人的姿态,因此需要考虑机器人运动学位姿模型对于路径规划的影响。本文研究的路径规划方法流程如图6所示。
3.2 路径规划目标函数
在运动规划中考虑路径长度从而寻求机器人从初始点到目标节点的最短距离。设相邻两节点距离为:
式中:xi,yi,zi分别为节点i的X、Y、Z方向坐标值;xj,yj,zj分别为节点j的X、Y、Z方向坐标值。
设定机器人路径规划的长度因子为:
本文采用机器人投影域内地面各点危险等级作为危险度评价指标,衡量机器人通过该区域的可能性,考虑机器人航向角度沿机器人规划的路径方向。机器人投影域定义为以机器人参考点坐标为中心,以参考点到机器人轮-地接触点C的长度为半径的圆。记R为该区域内所有网格节点,则点(x,y)处的地面危险等级为R(x,y)为:
(11)
在目标函数中考虑地面危险等级的影响主要是因为崎岖地形的该指标对机器人的静态稳定性以及地面通过性影响很大,防止机器人发生倾覆。另外,地面危险等级相对于轮子直径的比值越大,崎岖地面的通过性能往往越低,需要在这些区域标记上更加大的危险等级,以避开危险地形。因此采用了如下的相对危险等级:
(12)
式中:α为大于 1 的常数,从而在保证对障碍物的表述连续性(相对于传统二进制 0-1的地形描述)的前提下,有效提高了机器人在危险区域的通过代价。
定义目标函数为Λ,为地面不平度、路径长度以及路径评估因子的组合[18]:
Λ=ξR′+τL′
(13)
式中:ζ和τ分别为常数,且0<(ζ+τ)1。用来调整目标函数与地面不平度和路径长度的相关程度。
3.3 路径规划计算
按照Delaunay三角形剖分算法建立尺寸为200 cm×200 cm的仿真地图,其中单位网格的尺寸为5 cm×5 cm,两个运动规划仿真地形实例如图7所示。

图7 运动规划仿真地形
为了验证本章中提出的机器人运动规划算法的可行性,分别在该地形上对机器人最短路径、最安全路径以及最优路径这三种目标函数下的路径进行了规划和评估。实验Dijkstra路径规划算法进行路径规划。得到仿真地形下按照不同的路径规划目标函数得到的路径规划结果如图8所示。
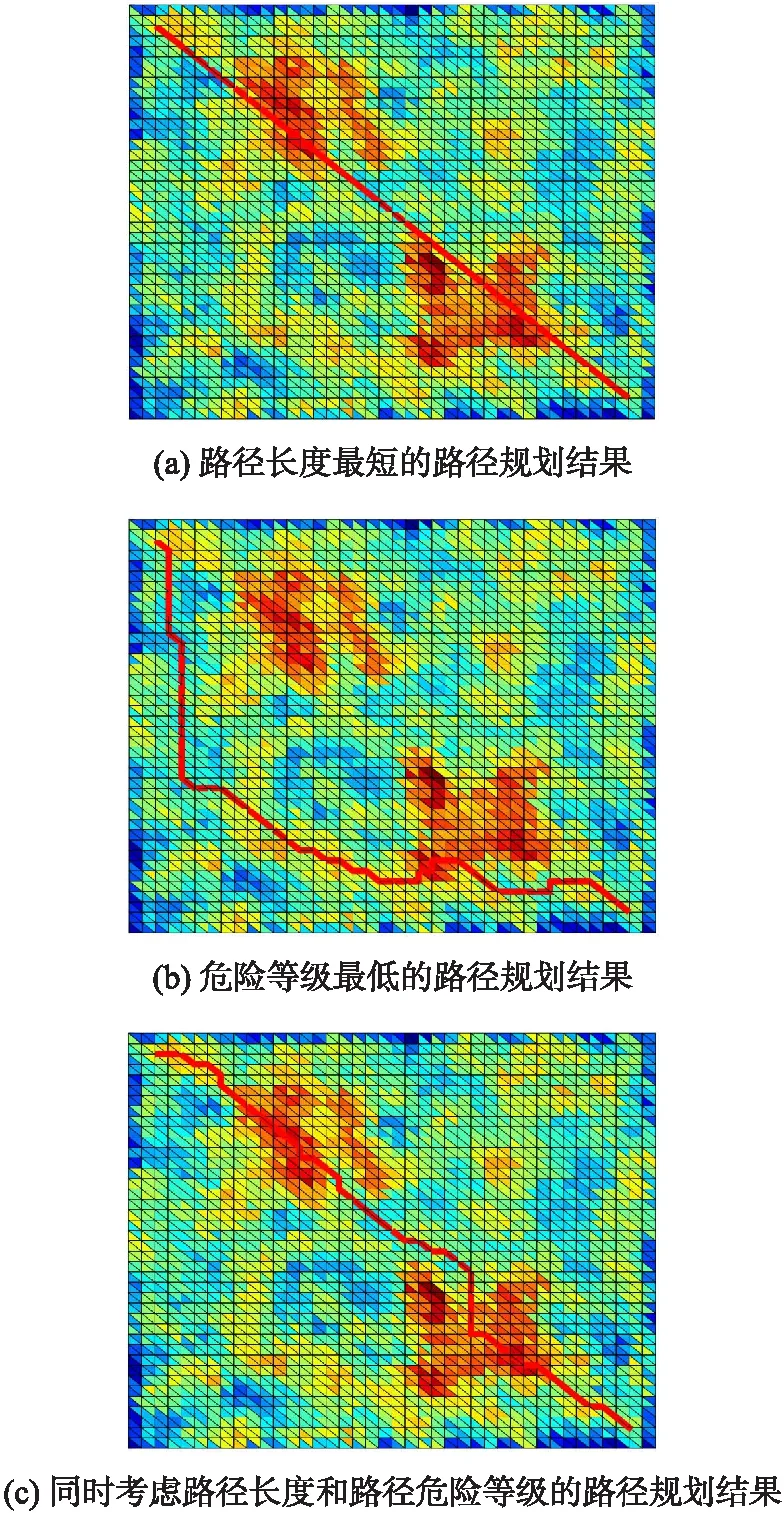
图8 仿真地形的仿真结果
由仿真地形下按照不同的路径规划目标函数得到的路径规划结果可知,最短路径忽略了地面粗糙度对目标函数的影响,虽然路径最短,但是跨过了地面中最崎岖的区域;危险等级最低的路径地面粗糙度明显较小,绕过了地图中地面高程较高的区域;最优路径则一方面保证了路径长度相对较小,又保证了路径的安全性。
对不同路径规划仿真结果进行分析。分别对路径长度因子、地面危险等级以及路径规划时间进行统计,得到两种仿真地形下的路径规划结果对比见表1所示。
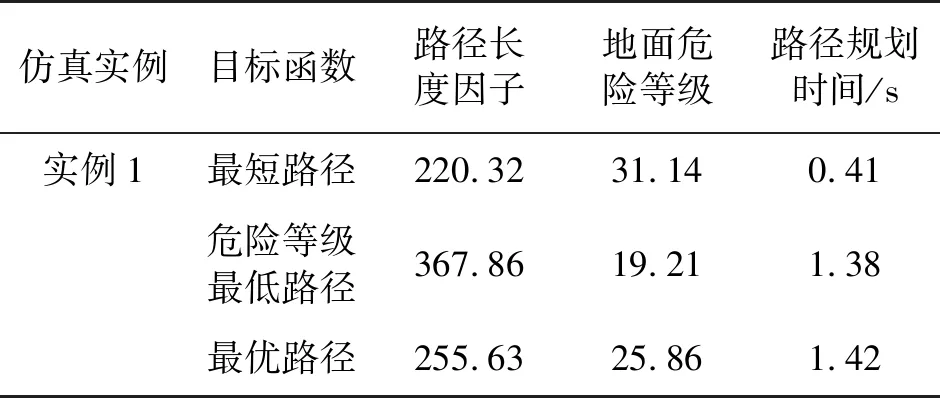
表1 两种仿真地形下的路径规划结果对比
由表1所示的两种仿真地形下的路径规划结果可以看出,三种目标函数中最短路径、危险等级最低的路径以及最优路径中,最短路径的规划结果的路径长度最短,但是这种路径的地面危险等级最大,机器人沿着规划的路径运动时消耗的能量最多且发生倾覆的危险最大。最优路径为最短路径和危险等级最低的折中路径,路径长度较最短路径稍大,但是累计的危险等级较低,因而机器人能够较安全的跟踪这种目标函数所规划的路径,并且保证路径长度因子较小。
3.4 路径规划结果仿真验证
使用运动学仿真软件ADAMS建立仿真地形图,再按照路径规划结果设置小车的行走路径。通过后处理显示小车的质心高度变化以及车身俯仰和翻滚偏角的变化情况。仿真地形中按照最短路径得到的小车的质心高度变化以及车身俯仰和翻滚偏角的变化情况如图9所示。
仿真地形中按照最低危险等级得到的小车的质心高度变化以及车身俯仰和翻滚偏角的变化情况如图10所示。

图10 仿真地形中最低危险等级得到的 小车的质心高度及俯仰和翻滚偏角
仿真地形中按照最优路径得到的小车的质心高度变化以及车身俯仰和翻滚偏角的变化情况如图11所示。

图11 仿真地形中最优路径得到的小车的 质心高度及俯仰和翻滚偏角
由两个仿真地形得到的最短路径、危险等级最低路径以及最优路径可以看出。最短路径所使用的时间最短,路径规划算法将路径长度作为目标函数,选取了起始点和终点路径长度最短作为机器人路径。虽然机器人行走的路径最短,机器人却穿越了地图上最为崎岖的地面,机器人侧倾角最大值超过了20°,有倾翻的危险。
危险等级最低的路径是由规划算法计算仿真地形中危险等级最低的区域而计算出来的路径,所以相比较于最短路径,该条路径下机器人的俯仰角、侧倾角的波动幅度小得多,均在±10°范围内,机器人稳定相比较最短路径更加平稳。
最优路径即为最短路径和危险等级最低路径的折中路线,一方面保证了机器人由起始点到达目标点的运动长度较短,另一方面地面该路径的地面不平度也较最短路径小。
4 结论
本文对煤矿井下探测搜救机器人地形感知系统进行研究,使用远近感知系统数据融合,提高机器人避障能力,最后通过实验验证本文研究感知系统的可行性。本文使用Dijkstra算法进行了路径规划研究,建立了融合路径长度和地面危险度等级的目标函数。通过仿真研究验证了本文提出的最优路径减小机器人行走过程的俯仰角、侧倾角的波动幅度。
