杂波环境下雷达/红外数据融合目标跟踪算法的研究
2019-08-13李战武胡晓东空军工程大学航空工程学院西安70038
陈 星,李战武,2,胡晓东(空军工程大学航空工程学院,西安70038)
2(西北工业大学电子信息学院,西安710072)
E-mail:cx312kgd@163.com
1 引言
现代信息化条件下的战争,争夺电磁波频域的主动权逐渐成为赢得战争的核心.雷达作为主动传感器,通过发射电磁波捕获目标的有关信息,能够提供完整的目标位置信息和Doppler信息,因此在目标跟踪和探测方面发挥了重要作用.
但是,由于雷达要向空中辐射大功率电磁波,容易暴露载机,受到反辐射导弹和电子干扰的攻击;同时,还存在低空盲区,当目标采取隐身措施或是在周围释放箔条弹时降低对雷达辐射的后向散射时,雷达对目标的探测距离和精度会大大下降.雷达的这些先天缺陷使其面临着“电子干扰、反辐射打击、隐身飞机、超低空突防”等多种威胁[1].红外传感器作为被动传感器,不向空中辐射任何能量,通过接收目标的产生的辐射,得到目标的有关信息,因而不易被侦察或定位,具有较强的抗干扰能力,且具有测角精度高和目标辨识能力强的优点.因此,在面临杂波环境下的机动目标跟踪问题,如何充分利用雷达、红外两种传感器的优势,使其相得益彰,是近年来国内外专家研究的热点.
在杂波干扰环境中,利用多传感器进行信息融合的跟踪问题引起了广大学者的研究.R.A.Singer在1970年基于假设各传感器估计误差相互独立情况下首次提出了多传感的简单航迹融合算法,但融合结果不是全局最优,为了弥补不足,在此基础之上,Y.Bar.Shalom等人提出了基于协方差加权的航迹融合算法[2,3],但是增加了算法的计算复杂度,不利于实现.随后,Willner等人利用Kalman滤波技术提出了集中式多传感器Kalman滤波算法[4].为了降低计算的复杂度,Simon Julier等人基于优化目标函数提出了协方差交叉算法,S.Mc Clean等人提出了结构简单易实现的加权融合算法等.为了提高系统的自适应性,李世忠等人提出了一种基于序贯滤波和交互式多模型融合算法,Beugnon等又提出了一种基于门限选择的自适应航迹融合算法[5-7].近几年,荣健等人根据自适应模糊理论和卡尔曼滤波实现航迹融合,提出了基于模糊系统的目标融合跟踪算法,并通过自适应调整系统参数[8],提高了对机动目标的跟踪精度.在此基础之上,张雨浓等提出利用神经网络和样条逼近理论确定权值的融合算法[9,10],提高了系统的稳定性和计算效率.
事实上,由于机动目标的扩展性,使得雷达每次扫描接收的回波不止一个,针对机动目标跟踪量测的起源和数目上的不确定性,本文采用多重检测概率数据关联算法(MDPDAF)可以很好地解决上述的不确定问题,IMM算法可以提高机动目标模型的自适应性,并通过序贯滤波的方式处理多传感器的测量数据,降低了计算的复杂度.在上述基础之上,本文提出了一种基于交互式多模型和多传感器多检测概率数据关联的融合算法(IMM/MS-MDPDAF),通过仿真验证发现具有比IMM/MSPDAF算法更好的跟踪精度.
2 问题描述
假设杂波环境下机动目标由n个模型组成,记为Mn={1,…,n},模型 j在时间段(tk-1,tk]内表示为 Mjk.则在模型j下目标的状态方程和传感器的量测方程如下所示:

式中,xk为tk时刻的状态变量;为传感器l的有效量测.q为传感器的数量;本文中通过将量测函数hl(xk)在预测状态xk处泰勒展开,从而使得非线性量测模型线性化,其线性化后的公式如下:

3 MDPDA滤波器
3.1 多检测模型
若目标检测到并且其量测落入跟踪门内,则认为该组数据与目标航迹相关联.由于多检测模式包含了航迹的所有关联量测数据集合,所以目标确切数目的不确定性以及测量起源的不确定性都可以得到很好地解决.
假设在时间k内错误的量测数目为mk,有效的量测数目为珚mk(mk≥珚mk).当雷达每次扫描中有多个有效量测数据时,假设φ为有效量测珚mk中的关联事件,φ的取值范围从1到目标源测量值的最大数量φmax.因此目标航迹的所有关联事件集为:

3.2 MDPDA滤波算法
标准的PDAF[11]计算关联概率是基于假设每次最多只有一个是源于目标的有效量测,其余均为杂波或是无效的量测.由于目标的扩展性,往往同一时刻能够得到多组测量数据,而该算法是基于上述假设在所有的有效测量数据中分配相应的权重,在这种情况下就忽视了杂波所产生的无效测量数据相应的权重,因此在计算对应的关联数据概率时会出现不可避免的误差.
MDPDA[12]滤波器与PDAF相比计算每一组来源于感兴趣目标的量测数据.首先通过上一节的多检测模型提取有效的量测数据,然后通过MDPDAF计算出相应的关联概率.本文中为了简化计算,假设每次扫描最多得到两组来源于目标的量测数据(φmax=2),具体步骤如下[13]:
1)计算状态估计、协方差和量测预测
多检测模型(φ=1和φ=2)通过公式(9)可以描述为:


新息以及对应的协方差分别为:

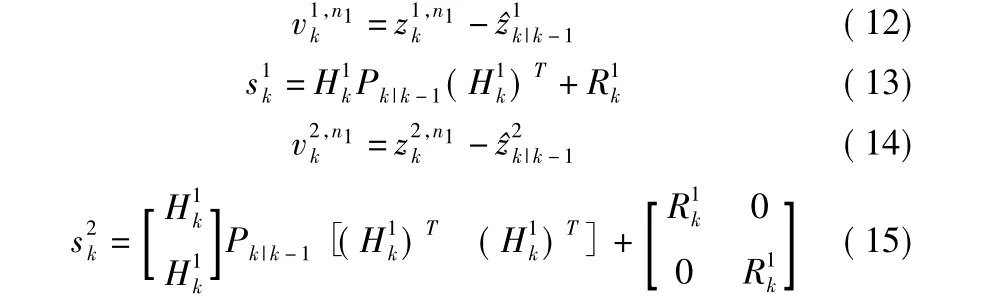
式中,nz是量测向量的维数,cnz为nz维的单位超球面的体积.
3)多重检测的状态估计
设以下符号表示特定的含义:

在标准的PDAF的基础之上,通过采用非参数模型可以进一步计算事件的关联概率[14],步骤如下:

4 IMM/MS-MDPDAF融合算法
为了提高雷达和红外跟踪的性能,更好地在杂波环境跟踪机动目标,融合系统采用序贯滤波[15-17]的方式对多传感器的量测数据进行处理.通过上一节算法的详细说明,在此简要叙述其思路和步骤为:首先计算交互混合状态估计和协方差以及模型滤波,得到目标状态预测和误差协方差,然后通过雷达的多检测模式进行状态更新以及似然函数计算,最后在贝叶斯的框架下进行目标状态估计的更新和协方差,循环计算完成对目标的状态估计.
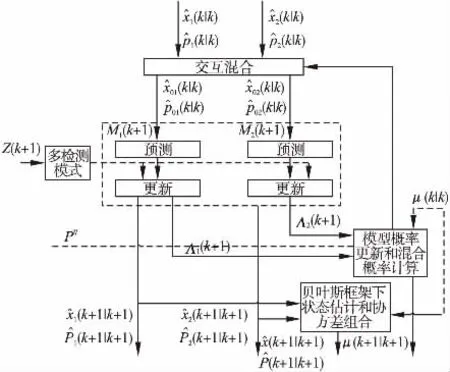
图1 IMM/MS-MDPDAF融合算法结构图Fig.1 Structure of IMM/MS-MDPDAF algorithm
IMM/MS-MDPDAF与标准的IMM/MDPDAF融合算法的步骤区别主要在第3、4步,IMM/MDPDAF算法第3步是对模型进行滤波求取状态的预测值、协方差等;第4步是计算模型更新概率.IMM/MS-MDPDAF算法第3步主要针对雷达验证量测结果形成多重检测模式,第4步在分别计算不同目标机动模型在多重检测模式下的关联数据概率,最后通过目标状态估计的更新以及协方差实现对目标的连续估计.IMM/MS-MDPDAF融合算法的具体步骤如图1所示.
5 仿真分析
为了验证本文提出的交互式多模型和多传感器多检测概率数据关联的融合算法(IMM/MS-MDPDAF),针对在杂波环境下跟踪机动目标的情形做出了相应的仿真分析,具体如下.
仿真场景设定:目标在笛卡尔坐标系中的初始位置为[2000,10000],初始速度 400m/s,目标的运动规律如表 1所示.
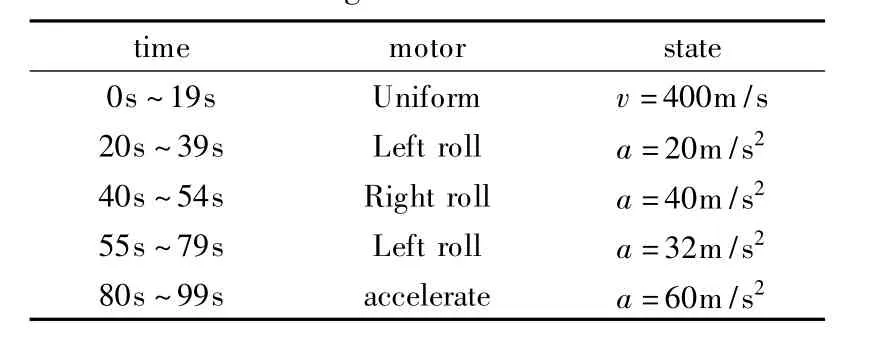
表1 目标运动规律Table 1 Target maneuver simulation
IMM算法采用r=3的目标机动模型,M1为CV模型,将加速度看作零均值高斯白噪声建模的过程噪声,标准差为5m/s2;M2、M3为CA模型,将加速度的变化看作是零均值高斯白噪声建模的过程噪声,标准差分别为7.5m/s2、40m/s2.模型的先验概率 μ0=[0.80.10.1],概率转移矩阵

假设雷达和红外采用同地配置、同步工作,采样时间T=1s.雷达的探测概率为 PD1,1=0.05、PD1,2=0.95.杂波相对于雷达和红外为 λ1=13×10-6和 λ2=7×10-4的泊松分布.门限γ=16,相应的接收正确回波的概率PG=0.9997.雷达测量距离r和方位角θ,红外测量方位角θ和俯仰角e,而距离、方位角和俯仰角与状态变量的关系为:
在上述的仿真场景以及参数设定的基础上,对IMM/MSMDPDAF和IMM/MSPDAF进行蒙特卡洛仿真200次,仿真给出了目标运动轨迹以及融合后目标位置和方位、俯仰角和速度的均方根误差曲线,如图2-图6所示.
对于雷达和红外传感器的协方差阵R1、R2为:

图2 机动目标的运动轨迹Fig.2 Trajectory of the maneuvering target
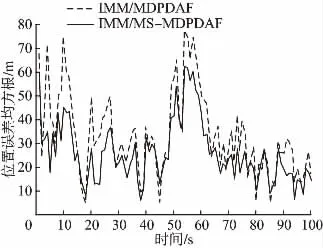
图3 位置误差均方根比较图Fig.3 Comparison between both algorithms in terms of RMSE in position
从图3-图6分别表示的位置、方位角、俯仰角和速度误差曲线中可以看出,在杂波环境下IMM/MS-MDPDAF算法的估计误差明显低于IMM/MSPDAF算法.通过图4和图5可以看出两种算法的误差曲线非常接近,这说明这种算法对于目标的角度都能够准确地跟踪,而对于目标的位置和速度的跟踪,可以通过图3和图6看出,当目标处于匀速或匀加速直线运动时,两种算法都能够很好地对目标的位置和速度进行跟踪;当目标做机动转弯时,从误差曲线图可以看出,IMM/MS-MDPDAF算法的误差明显要低于IMM/MSPDAF算法,这说明采用本文提出的算法能够提高跟踪目标的定位精度,较好地提升系统的跟踪性能和稳定性能.
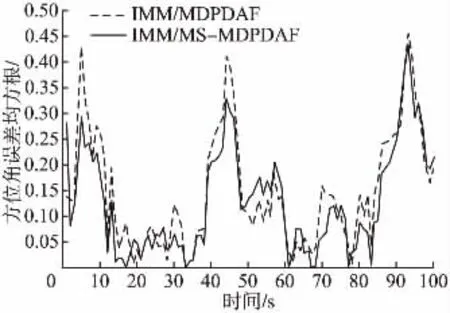
图4 方位角误差均方根比较图Fig.4 Comparison between both algorithms in terms of RMSE in azimuth angleθ
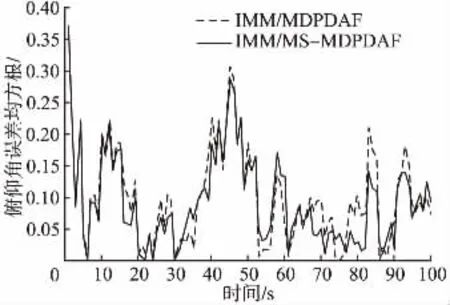
图5 俯仰角误差均方根比较图Fig.5 Comparison between both algorithms in terms of RMSE in elevation angle e

图6 速度误差均方根比较图Fig.6 Comparison between both algorithms in terms of RMSE in velocity
表2中包含了跟踪目标位置和方位、俯仰角和速度的均方根误差、虚假目标的数目以及丢失目标的数目.从表中可以看出两种算法的丢失目标的数目都为0,说明两种算法所建立的目标运动模型都能够包涵各种机动情况,考虑了目标运动的各种变化情况.从其他数据的分析可以看出,本文的算法较于IMM/MSPDAF算法,对于位置、方位角、俯仰角和速度的跟踪效果分别提高了 4.7%、13.1%、8.9% 和 1.3%,综上所述,可以得出IMM/MS-MDPDAF较IMM/MSPDAF算法对于机动目标跟踪具有更小的误差、更好的估计精度.

表2 两种算法的仿真结果比较Table 2 Quantitative comparison of two algorithms
6 结论
针对杂波环境下机动目标的跟踪问题,传统的IMM/MSPDAF方法由于不能较好地处理多个目标回波中的不确定性问题,本文提出的交互式多模型和多传感器多检测概率数据关联的融合算法(IMM/MS-MDPDAF),考虑了目标跟踪测量的起源和数目上的不确定性,通过采用雷达的多重检测模式和红外传感器进行联合观测、融合处理.仿真结果表明,该算法相对于IMM/MSPDAF,能够较好地提高机动目标的跟踪精度、改善系统的抗干扰能力,从而验证了该算法的有效性.
